- Історія розвитку робототехніки. Типологія роботів

Содержание
- 2. План уроку
- 3. Історія розвитку робототехніки Робототе́хніка (від робот і техніка; англ. robotics) (англ. robotics, нім. Robotertechnik f) —
- 4. Корені робототехніки йдуть в глибоку старовину. Вже тоді уперше виникли ідеї і були зроблені перші спроби
- 5. Роботи зі створення андроїдів досягли найбільшого розвитку в 18 ст. одночасно з розквітом годинникової майстерності. Механіками
- 6. Цілий ряд людиноподібних автоматів був створений швейцарськими годинникарями Пьером-Жаком Дро (1721-1790) і його сином Анрі Дро(1752
- 7. Американський інженер Венслі побудував керований на відстані за допомогою свистка автомат "Телевокс", який міг не лише
- 9. 1942 року письменник-фантаст Айзек Азімов створив свої три закони робототехніки. Робот не може заподіяти шкоду людині,
- 10. Цікаво нагадати, що в 1937 р. на Всесвітній виставці в Парижі демонструвався керований по радіо рухливий
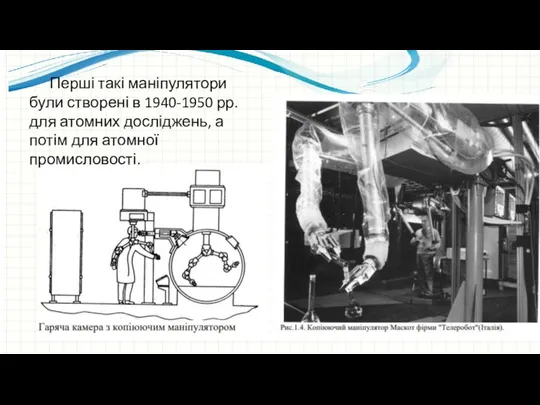
- 11. Перші такі маніпулятори були створені в 1940-1950 рр. для атомних досліджень, а потім для атомної промисловості.
- 12. Принципи кібернетики. Роберт Віннер 1. Центральний керуючий пристрій повинен бути цифровий. 2.Ці пристрої є по суті
- 13. Створення першої автономної системи Повністю автономна роботизована система, з'явилася лише у другій половині 20-го століття. Перший
- 14. Основні частини автономної системи Центр керування роботом (контролер, компютер, штучний інтелект) Сенсори та різноманітні датчики, відеокамери
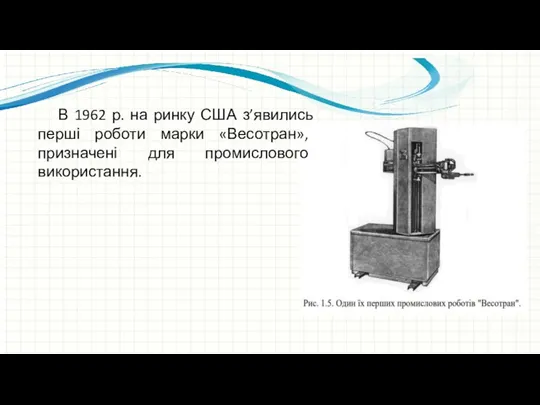
- 15. В 1962 р. на ринку США з’явились перші роботи марки «Весотран», призначені для промислового використання.
- 16. Перші повністю автоматично діючі маніпулятори були створені в США в 1960-1961 рр. В 1961 р. був
- 17. Роботи першого покоління призначені в основному для виконання заздалегідь запрограмованої послідовності технологічних операцій. Керування такими роботами
- 18. Роботи другого покоління є адаптивними, тобто такими, що пристосовуються. Від роботів першого покоління вони відрізняються більш
- 19. Третє покоління роботів відрізняється від другого покоління більш вдосконалою системою управління, що включає в себе крім
- 20. www.themegallery.com Company Logo Основні типи автономних систем Військові роботи
- 21. www.themegallery.com Company Logo Основні типи автономних систем Автономні системи очищення територій
- 22. www.themegallery.com Company Logo Основні типи автономних систем Роботи для догляду та очищення приміщень
- 23. Основні типи автономних систем Медичні автономні системи
- 24. Поділ роботів за методом пересування Колісний Балансуючий Кінцівках Стаціонарний БПЛА БПЛА БППА
- 26. Скачать презентацию
Слайд 3Історія розвитку робототехніки
Робототе́хніка (від робот і техніка; англ. robotics) (англ. robotics, нім. Robotertechnik f) — прикладна наука, що опікується проєктуванням, розробкою, будівництвом, експлуатацією
Історія розвитку робототехніки
Робототе́хніка (від робот і техніка; англ. robotics) (англ. robotics, нім. Robotertechnik f) — прикладна наука, що опікується проєктуванням, розробкою, будівництвом, експлуатацією
Слайд 4 Корені робототехніки йдуть в глибоку старовину. Вже тоді уперше виникли ідеї і
Корені робототехніки йдуть в глибоку старовину. Вже тоді уперше виникли ідеї і
Слайд 5 Роботи зі створення андроїдів досягли найбільшого розвитку в 18 ст. одночасно з
Роботи зі створення андроїдів досягли найбільшого розвитку в 18 ст. одночасно з
Слайд 6 Цілий ряд людиноподібних автоматів був створений швейцарськими годинникарями Пьером-Жаком Дро (1721-1790) і
Цілий ряд людиноподібних автоматів був створений швейцарськими годинникарями Пьером-Жаком Дро (1721-1790) і
Слайд 7 Американський інженер Венслі побудував керований на відстані за допомогою свистка автомат "Телевокс",
Американський інженер Венслі побудував керований на відстані за допомогою свистка автомат "Телевокс",
Слайд 9 1942 року письменник-фантаст Айзек Азімов створив свої три закони робототехніки.
Робот не може заподіяти шкоду людині,
1942 року письменник-фантаст Айзек Азімов створив свої три закони робототехніки.
Робот не може заподіяти шкоду людині,
Слайд 10 Цікаво нагадати, що в 1937 р. на Всесвітній виставці в Парижі демонструвався
Цікаво нагадати, що в 1937 р. на Всесвітній виставці в Парижі демонструвався
Слайд 11 Перші такі маніпулятори були створені в 1940-1950 рр. для атомних досліджень, а
Перші такі маніпулятори були створені в 1940-1950 рр. для атомних досліджень, а
Слайд 12Принципи кібернетики. Роберт Віннер
1. Центральний керуючий пристрій повинен бути цифровий.
2.Ці пристрої є
Принципи кібернетики. Роберт Віннер
1. Центральний керуючий пристрій повинен бути цифровий.
2.Ці пристрої є
Слайд 13Створення першої автономної системи
Повністю автономна роботизована система, з'явилася лише у другій половині
Створення першої автономної системи
Повністю автономна роботизована система, з'явилася лише у другій половині
Слайд 14Основні частини автономної системи
Центр керування роботом (контролер, компютер, штучний інтелект)
Сенсори та різноманітні
Основні частини автономної системи
Центр керування роботом (контролер, компютер, штучний інтелект)
Сенсори та різноманітні
Слайд 15 В 1962 р. на ринку США з’явились перші роботи марки «Весотран», призначені
В 1962 р. на ринку США з’явились перші роботи марки «Весотран», призначені
Слайд 16 Перші повністю автоматично діючі маніпулятори були створені в США в 1960-1961 рр.
Перші повністю автоматично діючі маніпулятори були створені в США в 1960-1961 рр.
Слайд 17 Роботи першого покоління призначені в основному для виконання заздалегідь запрограмованої послідовності технологічних
Роботи першого покоління призначені в основному для виконання заздалегідь запрограмованої послідовності технологічних
Слайд 18 Роботи другого покоління є адаптивними, тобто такими, що пристосовуються. Від роботів першого покоління
Роботи другого покоління є адаптивними, тобто такими, що пристосовуються. Від роботів першого покоління
Слайд 19Третє покоління роботів відрізняється від другого покоління більш вдосконалою системою управління, що
Третє покоління роботів відрізняється від другого покоління більш вдосконалою системою управління, що
Слайд 20www.themegallery.com
Company Logo
Основні типи автономних систем
Військові роботи
www.themegallery.com
Company Logo
Основні типи автономних систем
Військові роботи
Слайд 21www.themegallery.com
Company Logo
Основні типи автономних систем
Автономні системи
очищення територій
www.themegallery.com
Company Logo
Основні типи автономних систем
Автономні системи
очищення територій
Слайд 22www.themegallery.com
Company Logo
Основні типи автономних систем
Роботи для догляду та очищення приміщень
www.themegallery.com
Company Logo
Основні типи автономних систем
Роботи для догляду та очищення приміщень
Слайд 23Основні типи автономних систем
Медичні автономні системи
Основні типи автономних систем
Медичні автономні системи

Слайд 24 Поділ роботів за методом пересування
Колісний Балансуючий Кінцівках Стаціонарний
БПЛА
БПЛА
БППА
Поділ роботів за методом пересування
Колісний Балансуючий Кінцівках Стаціонарний
БПЛА
БПЛА
БППА

 Средства радиосвязи. Тема 2
Средства радиосвязи. Тема 2 Тепловые двигатели
Тепловые двигатели Радиационная гигиена
Радиационная гигиена Технология. Ядерная энергия
Технология. Ядерная энергия Тепловые двигатели
Тепловые двигатели Надежность электроснабжения потребителей
Надежность электроснабжения потребителей Единая система допусков и посадок деталей и узлов машин, принципы её построения
Единая система допусков и посадок деталей и узлов машин, принципы её построения Дифракция механических волн
Дифракция механических волн Основы молекулярной физики
Основы молекулярной физики Магнитное поле электрического тока. Действие магнитного поля на проводники с током
Магнитное поле электрического тока. Действие магнитного поля на проводники с током Ознакомление со статистическими закономерностями на механической модели
Ознакомление со статистическими закономерностями на механической модели Решение задач на вычисление значения сопротивления силы тока, напряжения в цепи переменного тока
Решение задач на вычисление значения сопротивления силы тока, напряжения в цепи переменного тока Сила трения
Сила трения Двигатель внутреннего сгорания
Двигатель внутреннего сгорания Контрольная работа по теме МКТ
Контрольная работа по теме МКТ Династия ученых-физиков Кюри
Династия ученых-физиков Кюри Французский язык
Французский язык Выпуск первого автомобиля в г. Тольятти
Выпуск первого автомобиля в г. Тольятти Закон всемирного тяготения. Сила тяжести. Сила упругости. Сила трения. Подготовка к ОГЭ 9 класс
Закон всемирного тяготения. Сила тяжести. Сила упругости. Сила трения. Подготовка к ОГЭ 9 класс Гидравлика 2
Гидравлика 2 Плотность. Расчет массы и объема тела по его плотности
Плотность. Расчет массы и объема тела по его плотности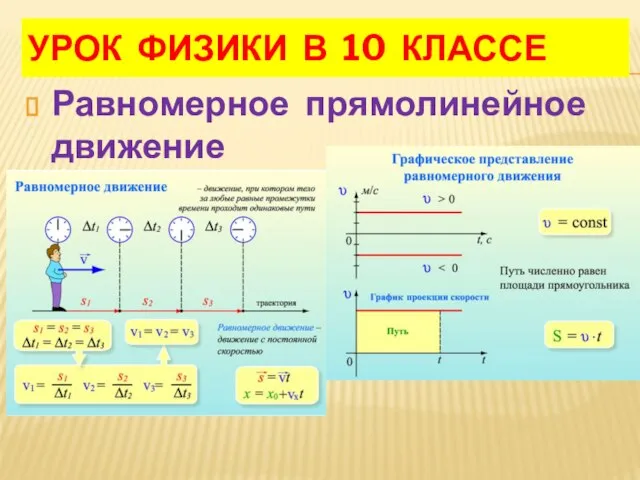 Урок физики в 10 классе. Равномерное прямолинейное движение
Урок физики в 10 классе. Равномерное прямолинейное движение Оптимальна обробка радіотеплових сигналів
Оптимальна обробка радіотеплових сигналів Модель Андерсона для описания магнитных примесей в металле
Модель Андерсона для описания магнитных примесей в металле Внутренняя энергия и работа в термодинамике
Внутренняя энергия и работа в термодинамике Методы инструментального выявления недостоверного учета электрической энергии
Методы инструментального выявления недостоверного учета электрической энергии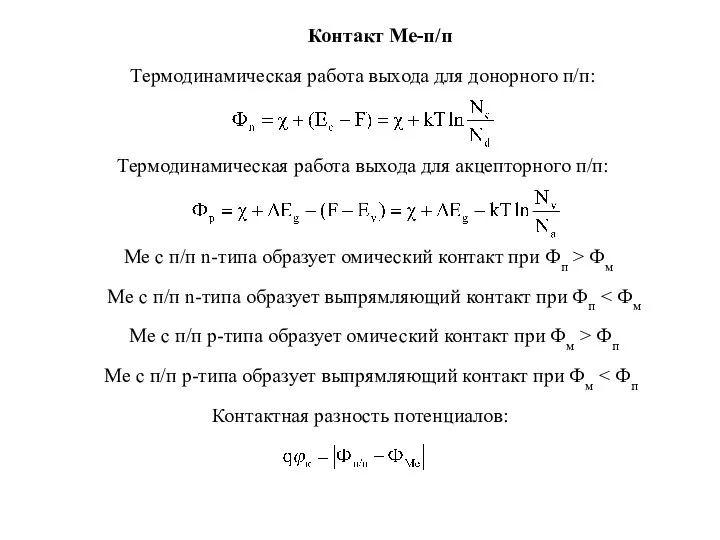 Me-полупроводник
Me-полупроводник Понятие об энтропии
Понятие об энтропии