- Теория упругости. Основные положения, допущения и обозначения

Содержание
- 2. Теория упругости имеет целью аналитическое изучение напряженно-деформированного состояния упругого тела. С помощью теории упругости могут быть
- 3. В математической линейной теории упругости исходят из следующих допущений: 1. О непрерывности (сплошности) среды. При этом
- 4. 4. О шаровой изотропности, на основании которого считается, что механические свойства материала одинаковы по всем направлениям.
- 5. При решении задач теории упругости часто пользуются принципом Сен-Венана: если внешние силы, приложенные на небольшом участке
- 6. ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ 18 ВНЕШНИЕ СИЛЫ (нагрузки) Поверхностные Объемные – результат непосредственного контактного взаимодействия тела
- 7. ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ 19 распределенные по площади р Давление снега на кровлю, давление зерна на
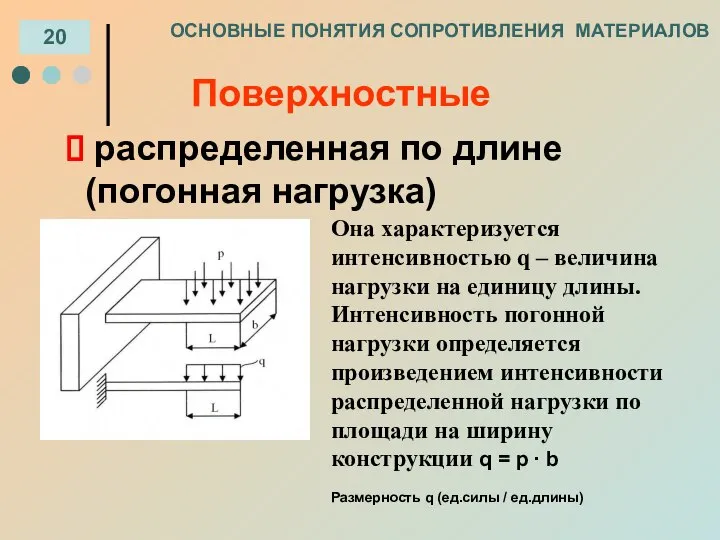
- 8. ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ 20 распределенная по длине (погонная нагрузка) Поверхностные Она характеризуется интенсивностью q –
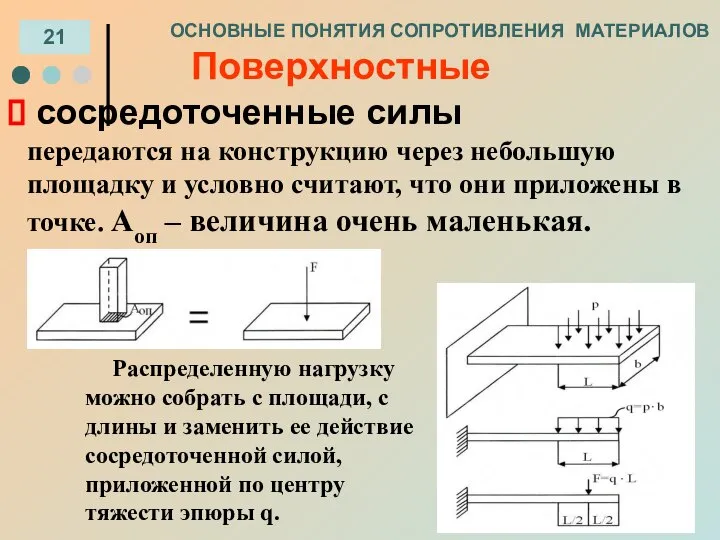
- 9. ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ 21 сосредоточенные силы передаются на конструкцию через небольшую площадку и условно считают,
- 10. ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ 22 приложены к каждой точке объема. Это – собственный вес, центробежные силы,
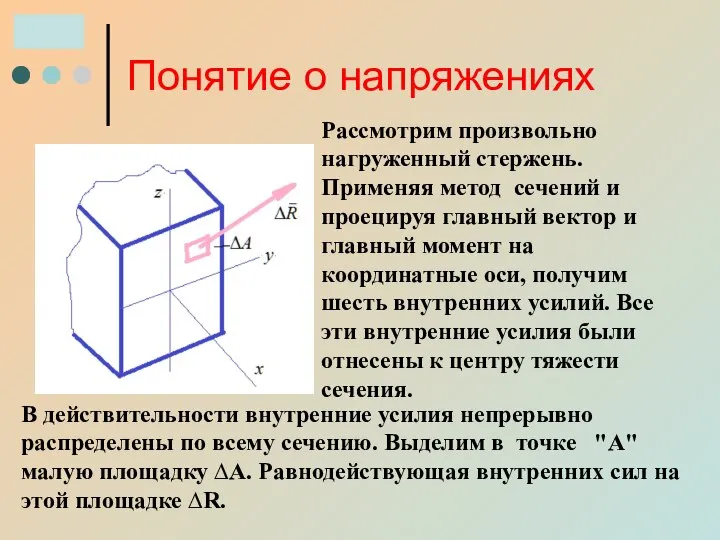
- 11. Понятие о напряжениях Рассмотрим произвольно нагруженный стержень. Применяя метод сечений и проецируя главный вектор и главный
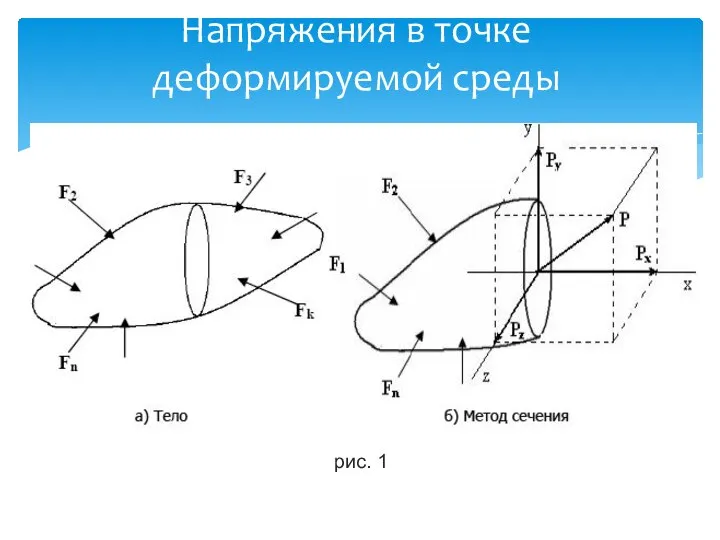
- 12. Напряжения в точке деформируемой среды рис. 1
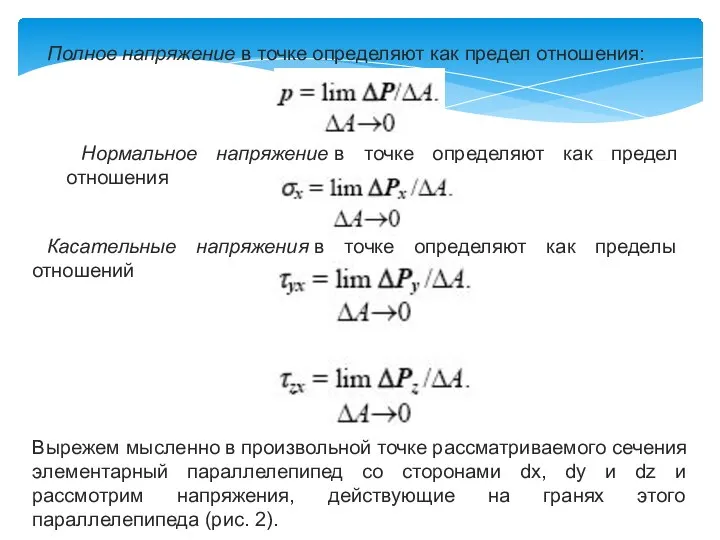
- 13. Полное напряжение в точке определяют как предел отношения: Нормальное напряжение в точке определяют как предел отношения
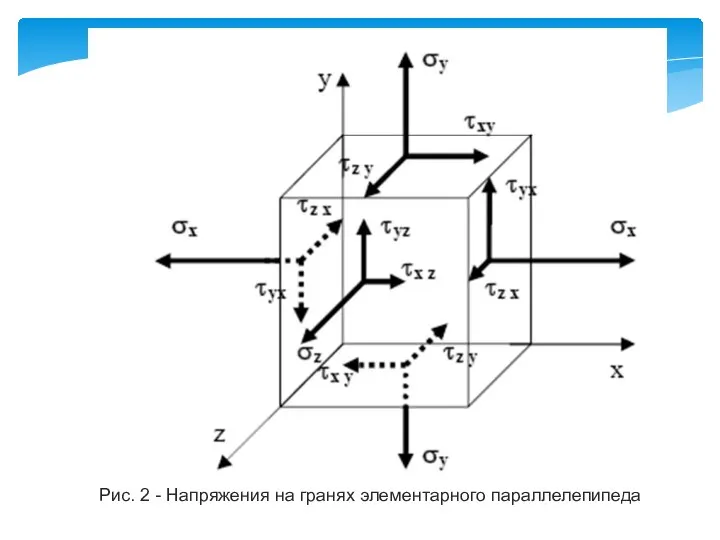
- 14. Рис. 2 - Напряжения на гранях элементарного параллелепипеда
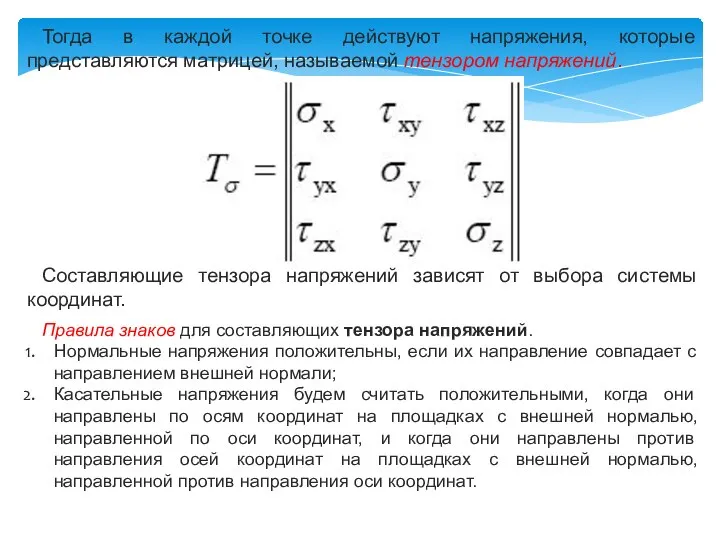
- 15. Тогда в каждой точке действуют напряжения, которые представляются матрицей, называемой тензором напряжений. Составляющие тензора напряжений зависят
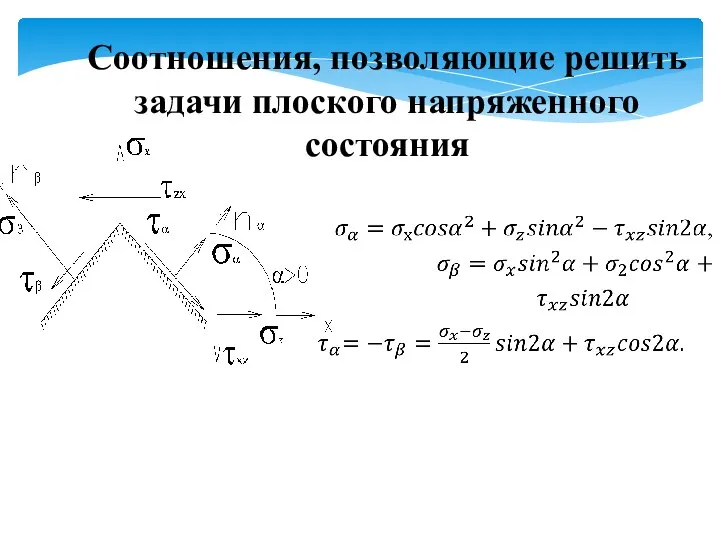
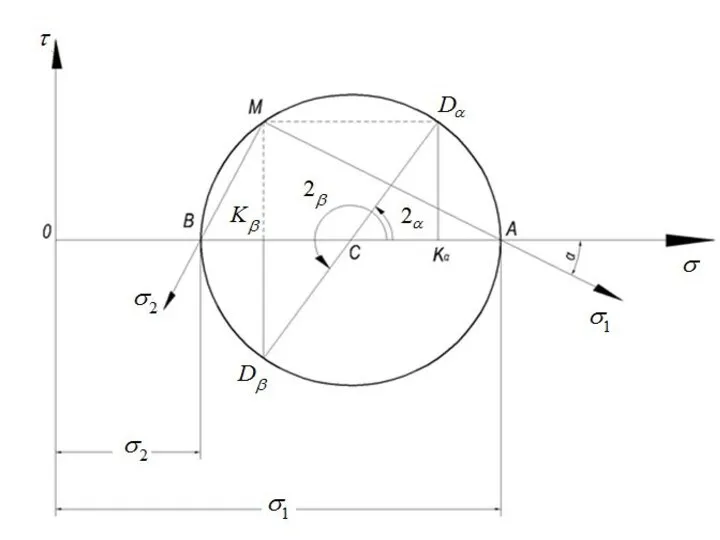
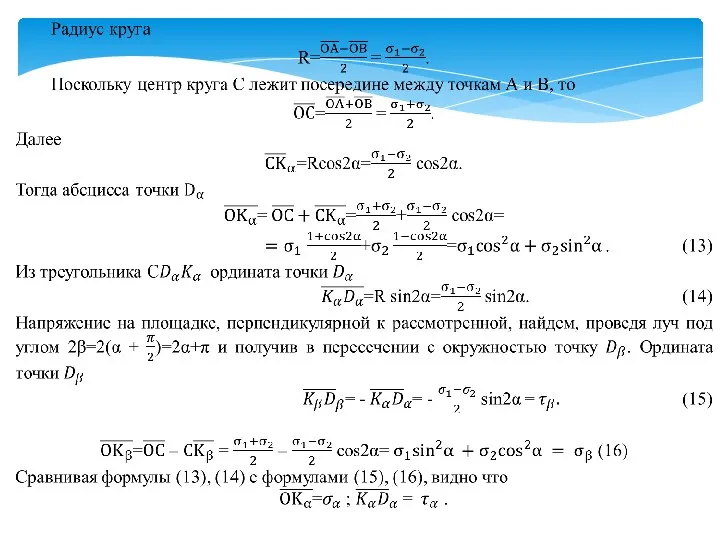
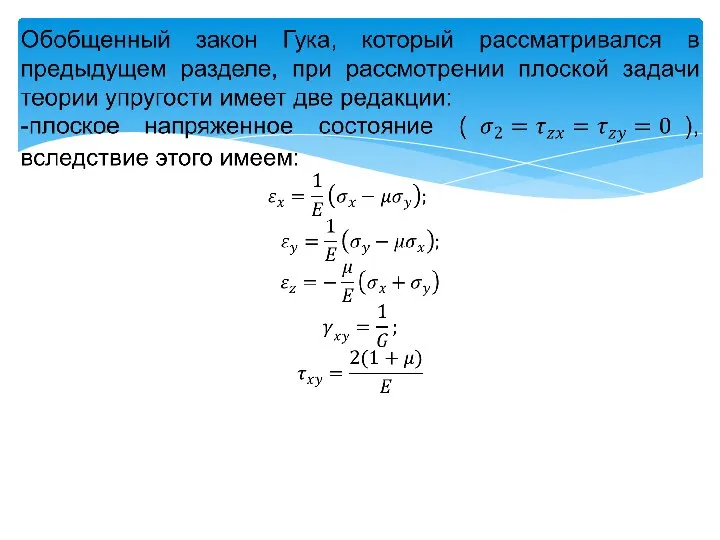
- 16. Соотношения, позволяющие решить задачи плоского напряженного состояния
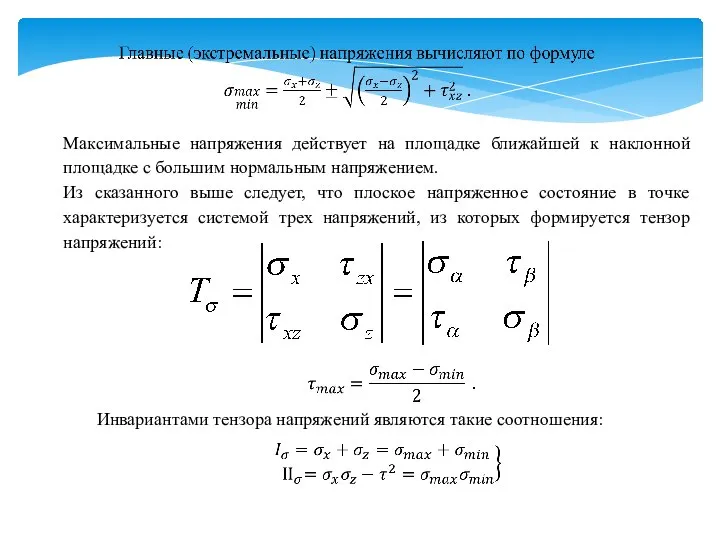
- 17. Максимальные напряжения действует на площадке ближайшей к наклонной площадке с большим нормальным напряжением. Из сказанного выше
- 21. Дифференциальные уравнения равновесия (уравнения Навье)
- 22. Ввиду бесконечной малости параллелепипеда принято, что напряжения во всём его объёме остаются неизменяемыми (однородное напряжённое состояние).
- 24. Рассмотрим напряжения, параллельные оси х: σ x , τ xy , τxz Если на левой грани
- 25. При выводе уравнений равновесия проекций сил элементарные силы на поверхностях граней параллелепипеда получаем перемножением напряжений на
- 26. Полученные три дифференциальных уравнения равновесия называются уравнениями Навье. Если для параллелепипеда аналогично расписать три уравнения статики
- 27. Согласно этому закону по двум взаимно перпендикулярным площадкам составляющие касательных напряжений, перпендикулярные линиям пересечения этих площадок,
- 28. Шаровой тензор и девиатор напряжений
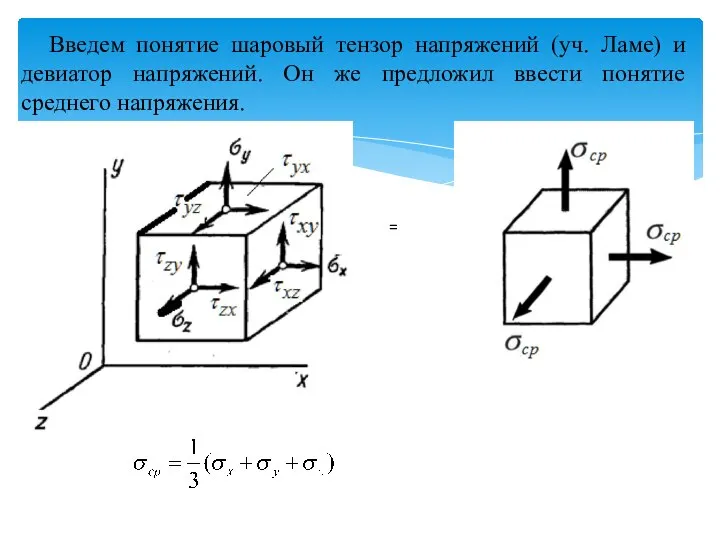
- 29. = Введем понятие шаровый тензор напряжений (уч. Ламе) и девиатор напряжений. Он же предложил ввести понятие
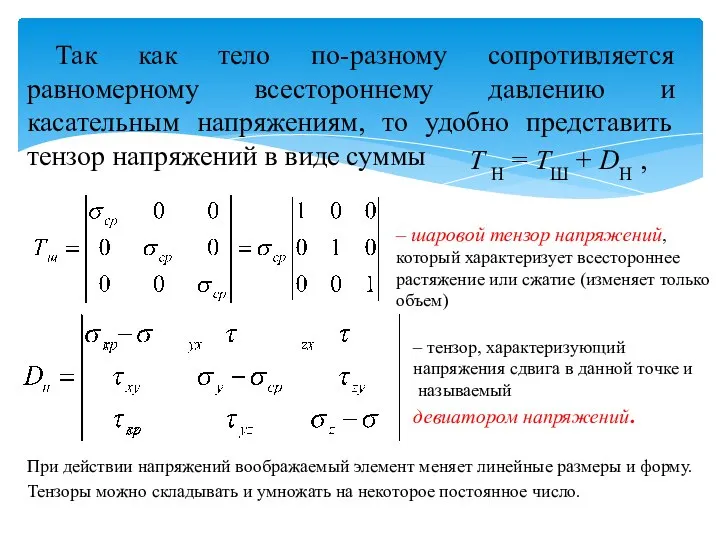
- 30. Так как тело по-разному сопротивляется равномерному всестороннему давлению и касательным напряжениям, то удобно представить тензор напряжений
- 31. Тензор деформаций. Связь между перемещениями и деформациями (формулы Коши)
- 32. Если упругое тело закрепить так, чтобы оно не могло перемещаться как абсолютно твёрдое тело, и приложить
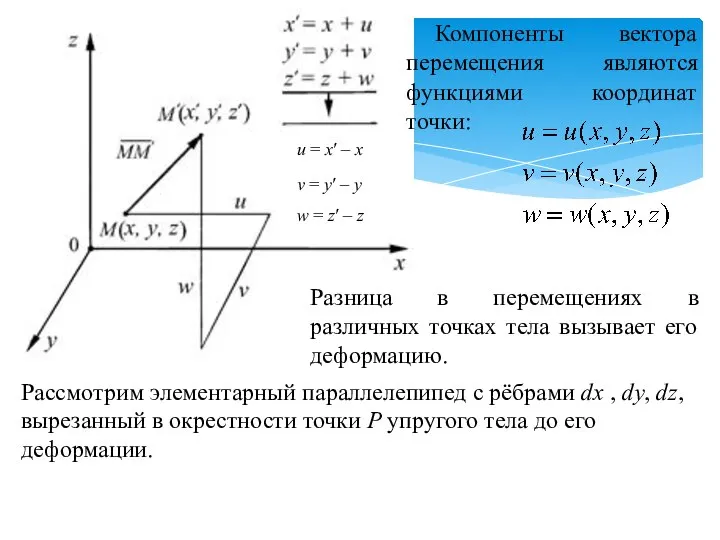
- 33. u = x′ – х v = y′ – y w = z′ – z Компоненты
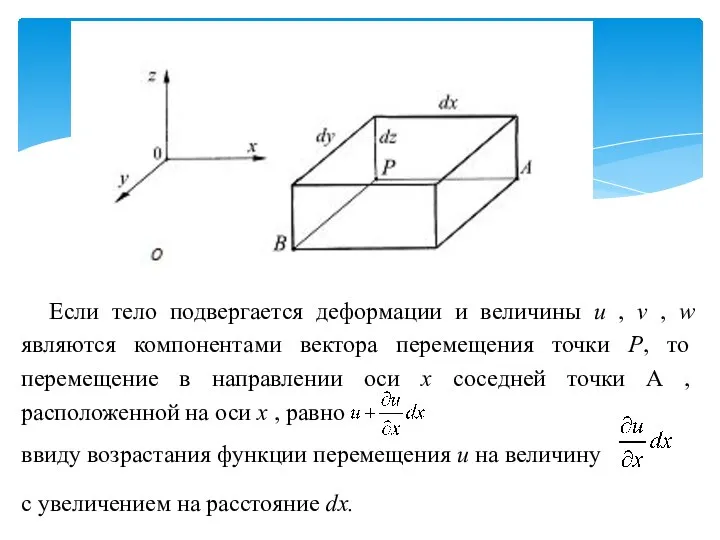
- 34. Если тело подвергается деформации и величины u , v , w являются компонентами вектора перемещения точки
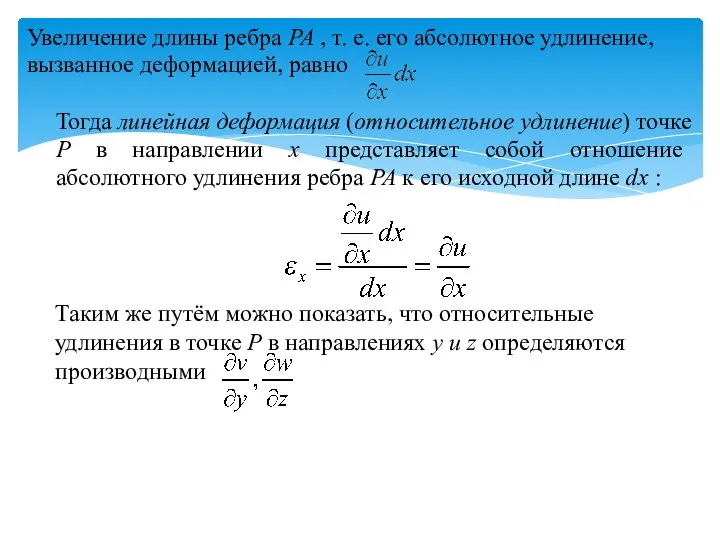
- 35. Увеличение длины ребра PA , т. е. его абсолютное удлинение, вызванное деформацией, равно Тогда линейная деформация
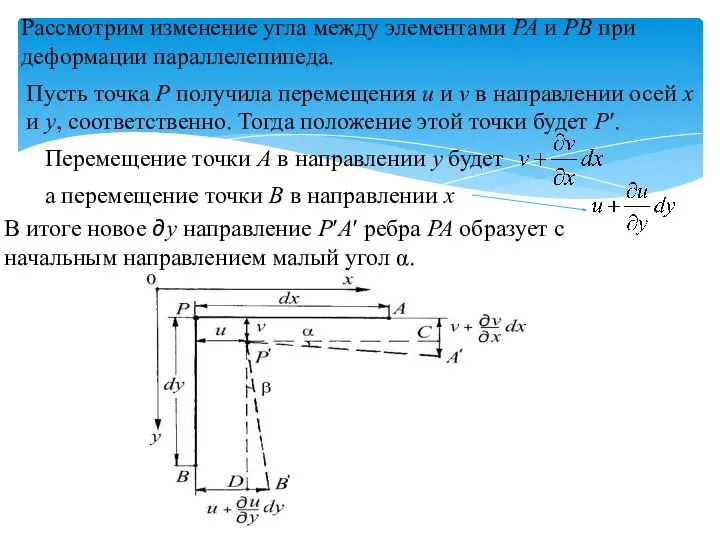
- 36. Рассмотрим изменение угла между элементами PA и PB при деформации параллелепипеда. Пусть точка Р получила перемещения
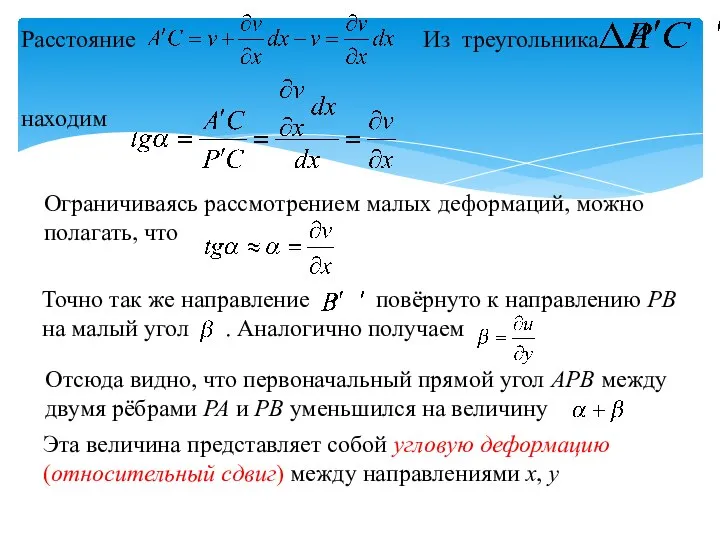
- 37. Расстояние Из треугольника находим Ограничиваясь рассмотрением малых деформаций, можно полагать, что Точно так же направление повёрнуто
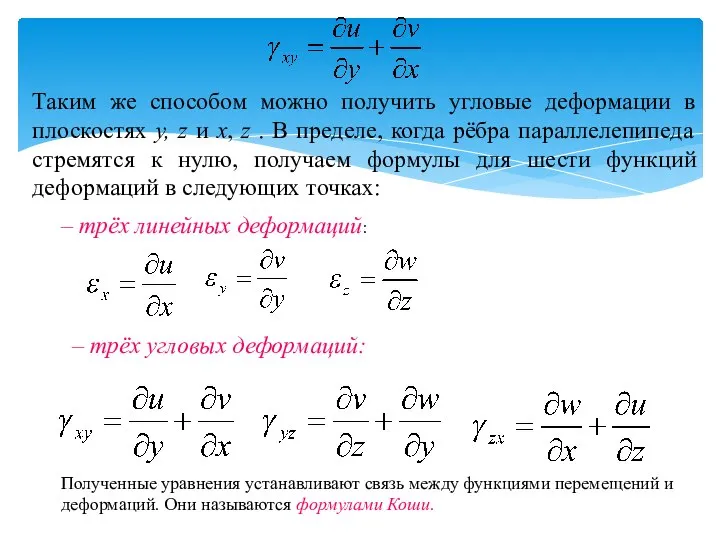
- 38. Таким же способом можно получить угловые деформации в плоскостях y, z и x, z . В
- 39. Условие совместимости деформаций
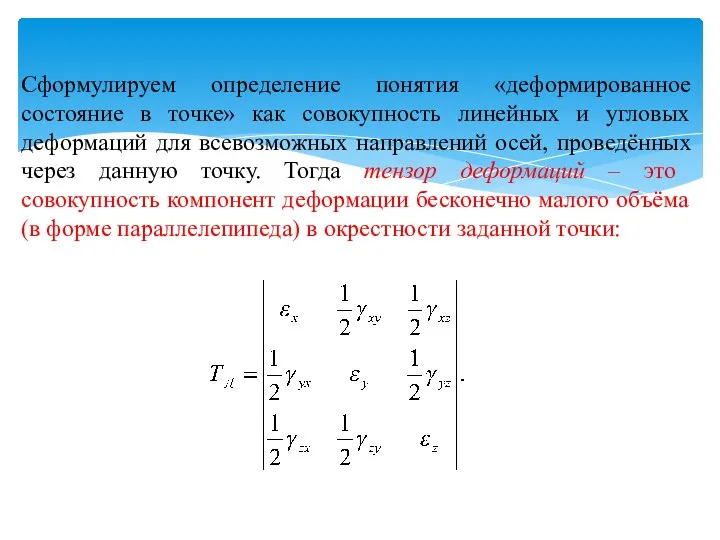
- 40. Сформулируем определение понятия «деформированное состояние в точке» как совокупность линейных и угловых деформаций для всевозможных направлений
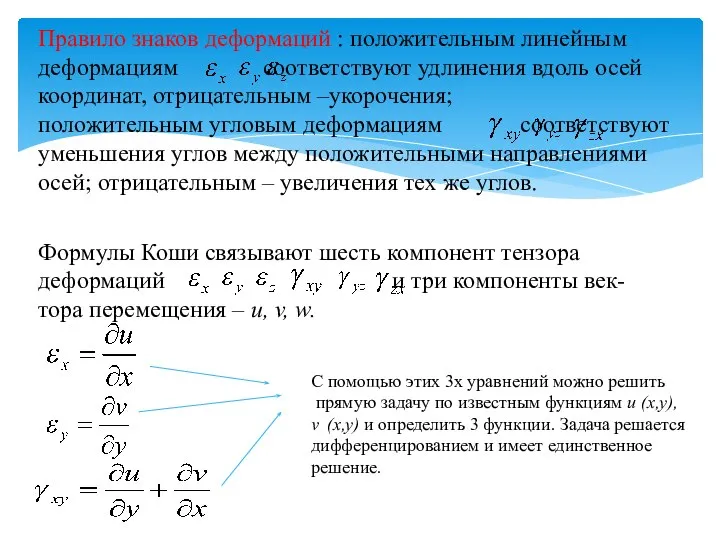
- 41. Правило знаков деформаций : положительным линейным деформациям соответствуют удлинения вдоль осей координат, отрицательным –укорочения; положительным угловым
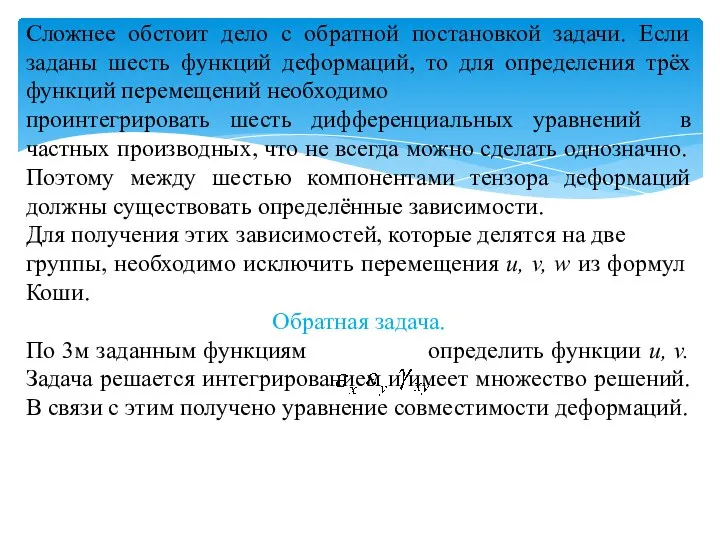
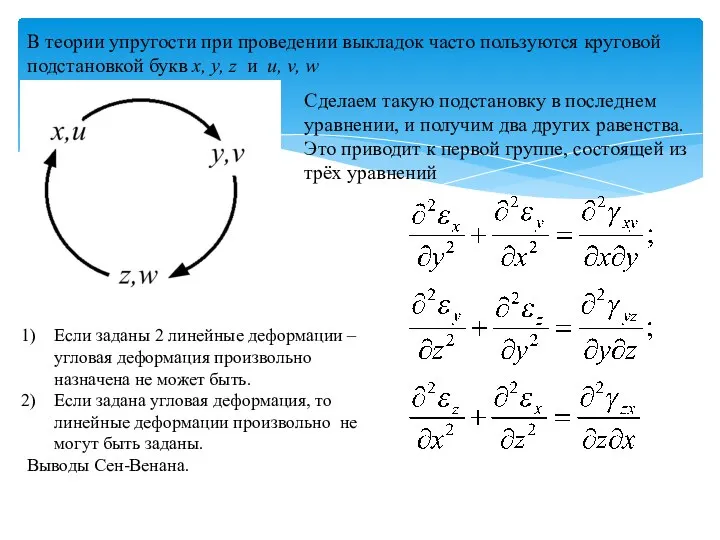
- 42. Сложнее обстоит дело с обратной постановкой задачи. Если заданы шесть функций деформаций, то для определения трёх
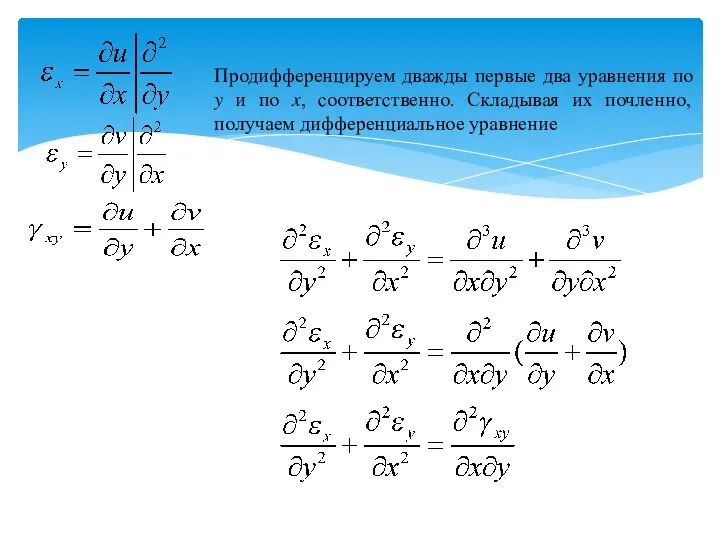
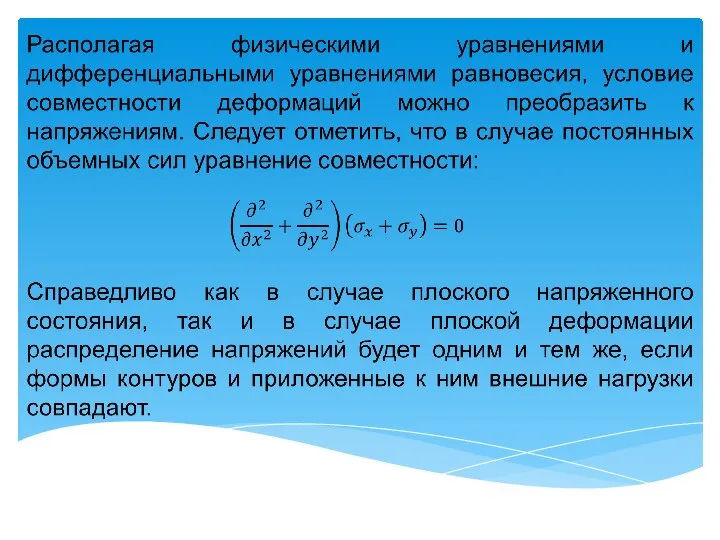
- 43. Продифференцируем дважды первые два уравнения по y и по x, соответственно. Складывая их почленно, получаем дифференциальное
- 44. В теории упругости при проведении выкладок часто пользуются круговой подстановкой букв x, y, z и u,
- 45. Обобщённый закон Гука
- 46. Английский естествоиспытатель Роберт Гук в 1660 г. открыл закон, названный его именем. Этот закон устанавливает линейную
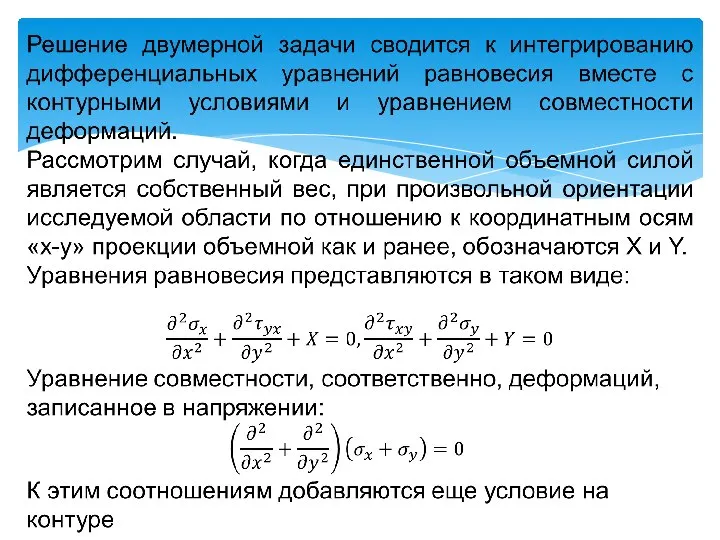
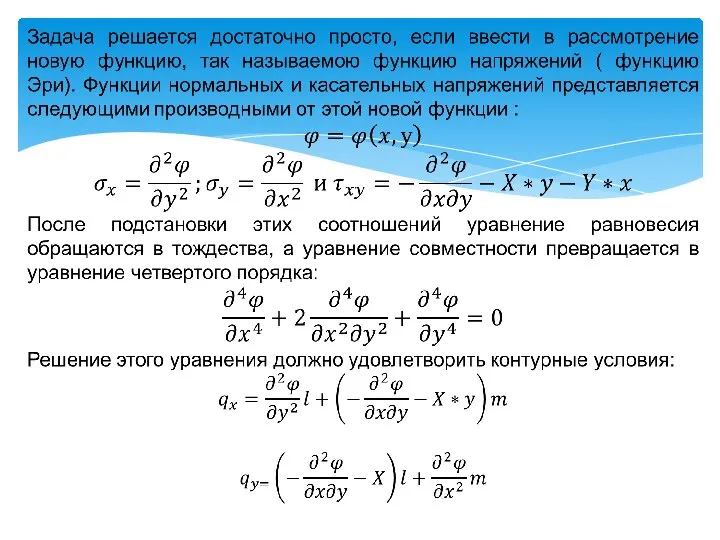
- 51. Чтобы установить зависимость между компонентами тензоров деформаций и напряжений при объёмном напряжённом состоянии, выделим из тела
- 53. Скачать презентацию
Слайд 2Теория упругости имеет целью аналитическое изучение напряженно-деформированного состояния упругого тела. С помощью
Теория упругости имеет целью аналитическое изучение напряженно-деформированного состояния упругого тела. С помощью
Слайд 3В математической линейной теории упругости исходят из следующих допущений:
1. О непрерывности (сплошности)
В математической линейной теории упругости исходят из следующих допущений:
1. О непрерывности (сплошности)
Слайд 44. О шаровой изотропности, на основании которого считается, что механические свойства материала одинаковы по всем
4. О шаровой изотропности, на основании которого считается, что механические свойства материала одинаковы по всем
Слайд 5При решении задач теории упругости часто пользуются принципом Сен-Венана: если внешние силы, приложенные
При решении задач теории упругости часто пользуются принципом Сен-Венана: если внешние силы, приложенные
Слайд 6ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ
18
ВНЕШНИЕ СИЛЫ (нагрузки)
Поверхностные Объемные
– результат непосредственного контактного взаимодействия
ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ
18
ВНЕШНИЕ СИЛЫ (нагрузки)
Поверхностные Объемные
– результат непосредственного контактного взаимодействия
Слайд 7ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ
19
распределенные по площади
р
Давление снега на кровлю, давление
ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ
19
распределенные по площади
р
Давление снега на кровлю, давление

Слайд 8ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ
20
распределенная по длине (погонная нагрузка)
Поверхностные
Она характеризуется интенсивностью q
ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ
20
распределенная по длине (погонная нагрузка)
Поверхностные
Она характеризуется интенсивностью q
Слайд 9ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ
21
сосредоточенные силы
передаются на конструкцию через небольшую площадку
ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ
21
сосредоточенные силы
передаются на конструкцию через небольшую площадку
Слайд 10ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ
22
приложены к каждой точке объема. Это – собственный вес,
ОСНОВНЫЕ ПОНЯТИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ
22
приложены к каждой точке объема. Это – собственный вес,
Слайд 11Понятие о напряжениях
Рассмотрим произвольно нагруженный стержень. Применяя метод сечений и проецируя главный
Понятие о напряжениях
Рассмотрим произвольно нагруженный стержень. Применяя метод сечений и проецируя главный
Слайд 12Напряжения в точке деформируемой среды
рис. 1
Напряжения в точке деформируемой среды
рис. 1
Слайд 13Полное напряжение в точке определяют как предел отношения:
Нормальное напряжение в точке определяют как предел
Полное напряжение в точке определяют как предел отношения:
Нормальное напряжение в точке определяют как предел
Слайд 14Рис. 2 - Напряжения на гранях элементарного параллелепипеда
Рис. 2 - Напряжения на гранях элементарного параллелепипеда
Слайд 15Тогда в каждой точке действуют напряжения, которые представляются матрицей, называемой тензором напряжений.
Составляющие
Тогда в каждой точке действуют напряжения, которые представляются матрицей, называемой тензором напряжений.
Составляющие
Слайд 16Соотношения, позволяющие решить задачи плоского напряженного состояния
Соотношения, позволяющие решить задачи плоского напряженного состояния
Слайд 17
Максимальные напряжения действует на площадке ближайшей к наклонной площадке с большим нормальным
Максимальные напряжения действует на площадке ближайшей к наклонной площадке с большим нормальным
Слайд 21Дифференциальные уравнения равновесия (уравнения Навье)
Дифференциальные уравнения равновесия (уравнения Навье)
Слайд 22Ввиду бесконечной малости параллелепипеда принято, что напряжения во всём его объёме остаются
Ввиду бесконечной малости параллелепипеда принято, что напряжения во всём его объёме остаются
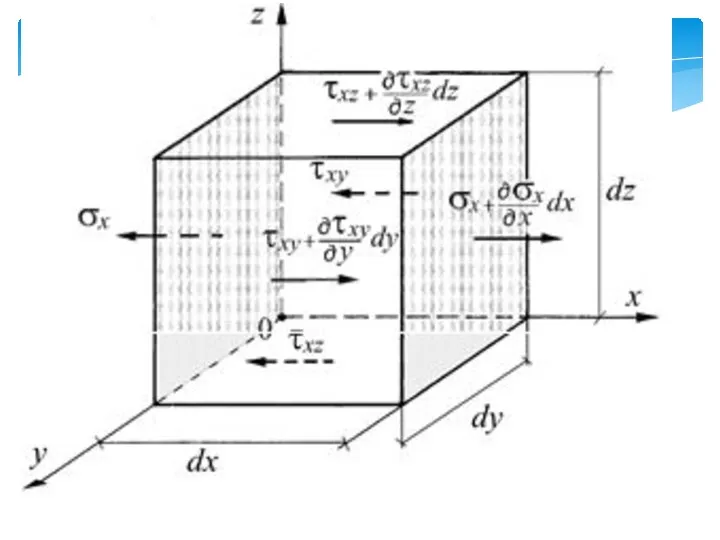
Слайд 24Рассмотрим напряжения, параллельные оси х:
σ x , τ xy , τxz
Рассмотрим напряжения, параллельные оси х:
σ x , τ xy , τxz
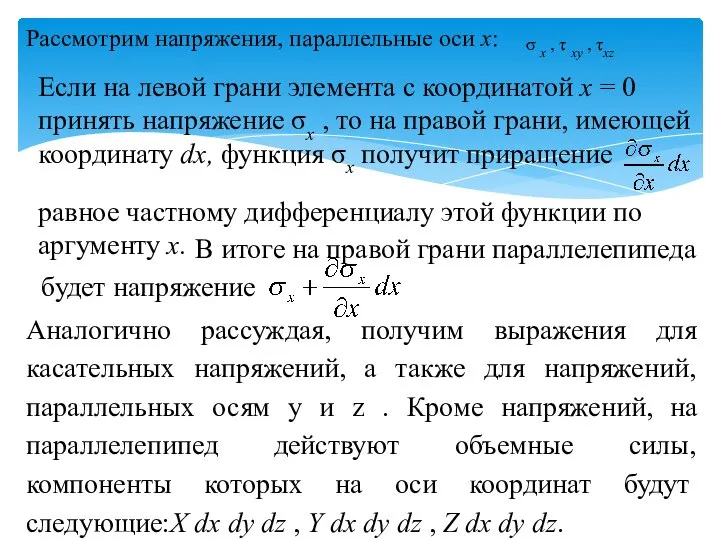
Слайд 25При выводе уравнений равновесия проекций сил элементарные силы на поверхностях граней параллелепипеда
При выводе уравнений равновесия проекций сил элементарные силы на поверхностях граней параллелепипеда
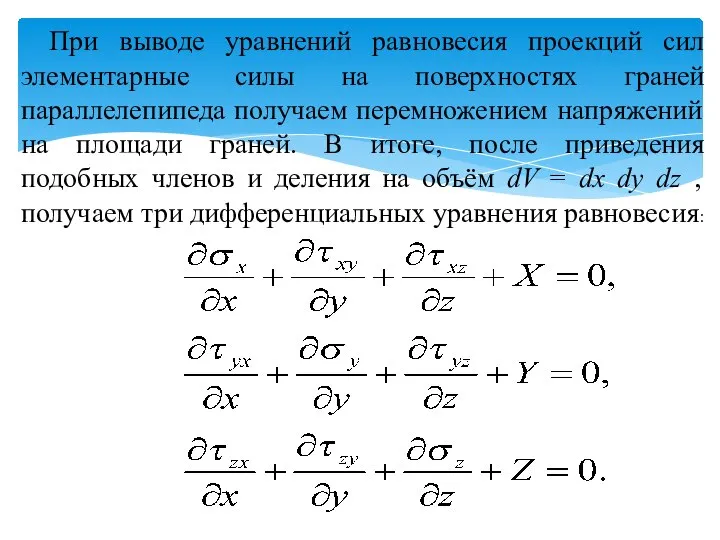
Слайд 26Полученные три дифференциальных уравнения равновесия называются уравнениями Навье.
Если для параллелепипеда аналогично расписать
Полученные три дифференциальных уравнения равновесия называются уравнениями Навье.
Если для параллелепипеда аналогично расписать
Слайд 27Согласно этому закону по двум взаимно перпендикулярным площадкам составляющие касательных напряжений, перпендикулярные
Согласно этому закону по двум взаимно перпендикулярным площадкам составляющие касательных напряжений, перпендикулярные
Слайд 28Шаровой тензор и девиатор напряжений
Шаровой тензор и девиатор напряжений
Слайд 29=
Введем понятие шаровый тензор напряжений (уч. Ламе) и девиатор напряжений. Он же
=
Введем понятие шаровый тензор напряжений (уч. Ламе) и девиатор напряжений. Он же
Слайд 30Так как тело по-разному сопротивляется равномерному всестороннему давлению и касательным напряжениям, то
Так как тело по-разному сопротивляется равномерному всестороннему давлению и касательным напряжениям, то
Слайд 31Тензор деформаций. Связь между перемещениями и деформациями (формулы Коши)
Тензор деформаций. Связь между перемещениями и деформациями (формулы Коши)
Слайд 32Если упругое тело закрепить так, чтобы оно не могло перемещаться как абсолютно
Если упругое тело закрепить так, чтобы оно не могло перемещаться как абсолютно
Слайд 33u = x′ – х
v = y′ – y
w = z′ –
u = x′ – х
v = y′ – y
w = z′ –
Слайд 34Если тело подвергается деформации и величины u , v , w являются
Если тело подвергается деформации и величины u , v , w являются
Слайд 35Увеличение длины ребра PA , т. е. его абсолютное удлинение, вызванное деформацией,
Увеличение длины ребра PA , т. е. его абсолютное удлинение, вызванное деформацией,
Слайд 36Рассмотрим изменение угла между элементами PA и PB при деформации параллелепипеда.
Пусть
Рассмотрим изменение угла между элементами PA и PB при деформации параллелепипеда.
Пусть
Слайд 37Расстояние
Из треугольника
находим
Ограничиваясь рассмотрением малых деформаций, можно полагать, что
Точно так же направление
Расстояние
Из треугольника
находим
Ограничиваясь рассмотрением малых деформаций, можно полагать, что
Точно так же направление
Слайд 38Таким же способом можно получить угловые деформации в плоскостях y, z и
Таким же способом можно получить угловые деформации в плоскостях y, z и
Слайд 39Условие совместимости деформаций
Условие совместимости деформаций
Слайд 40Сформулируем определение понятия «деформированное состояние в точке» как совокупность линейных и угловых
Сформулируем определение понятия «деформированное состояние в точке» как совокупность линейных и угловых
Слайд 41Правило знаков деформаций : положительным линейным деформациям соответствуют удлинения вдоль осей координат,
Правило знаков деформаций : положительным линейным деформациям соответствуют удлинения вдоль осей координат,
Слайд 42Сложнее обстоит дело с обратной постановкой задачи. Если заданы шесть функций деформаций,
Сложнее обстоит дело с обратной постановкой задачи. Если заданы шесть функций деформаций,
Слайд 43Продифференцируем дважды первые два уравнения по y и по x, соответственно. Складывая
Продифференцируем дважды первые два уравнения по y и по x, соответственно. Складывая
Слайд 44В теории упругости при проведении выкладок часто пользуются круговой подстановкой букв x,
В теории упругости при проведении выкладок часто пользуются круговой подстановкой букв x,
Слайд 45Обобщённый закон Гука
Обобщённый закон Гука
Слайд 46Английский естествоиспытатель Роберт Гук в 1660 г. открыл закон, названный его именем.
Английский естествоиспытатель Роберт Гук в 1660 г. открыл закон, названный его именем.
Слайд 51Чтобы установить зависимость между компонентами тензоров деформаций и напряжений при объёмном напряжённом
Чтобы установить зависимость между компонентами тензоров деформаций и напряжений при объёмном напряжённом
 Магнитный поток. Правило Ленца. Явление самоиндукции
Магнитный поток. Правило Ленца. Явление самоиндукции Простые механизмы
Простые механизмы Реактивное движение
Реактивное движение Презентация_Кинематика криволинейное движение (2)
Презентация_Кинематика криволинейное движение (2) Физика в загадках
Физика в загадках Карно Николо Леонар Сади 1796-1832
Карно Николо Леонар Сади 1796-1832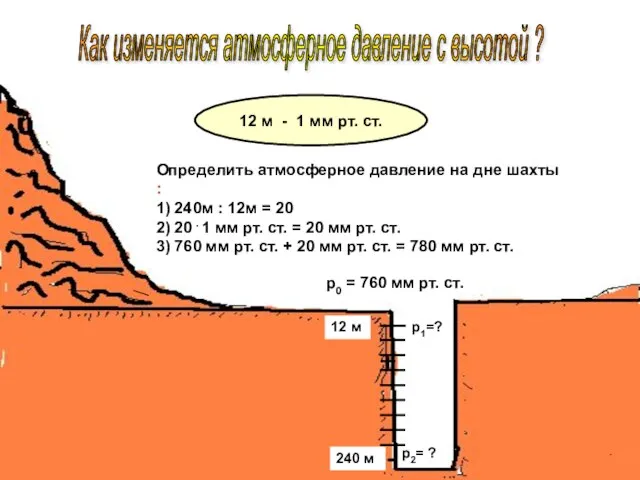 Презентация по физике "Как изменяется атмосферное давление с высотой ?" -
Презентация по физике "Как изменяется атмосферное давление с высотой ?" -  Направление индукционного тока
Направление индукционного тока Насос сетевой СЭ1250-140-11 с торцовыми уплотнениями
Насос сетевой СЭ1250-140-11 с торцовыми уплотнениями Фізичні та хімічні явища
Фізичні та хімічні явища Способы увеличения и уменьшения давления
Способы увеличения и уменьшения давления Тормозной путь
Тормозной путь Технологическая планировка моторного участка ремонта автомобиля АРП
Технологическая планировка моторного участка ремонта автомобиля АРП Плотность вещества
Плотность вещества Презентация на тему Применение закона рычага к блоку
Презентация на тему Применение закона рычага к блоку  pravilo_Kirkhgofa
pravilo_Kirkhgofa Давление газа. Уравнение состояния идеального газа. Изопроцессы
Давление газа. Уравнение состояния идеального газа. Изопроцессы Применение фотоэффекта
Применение фотоэффекта ВСР №20. Голография и ее применение
ВСР №20. Голография и ее применение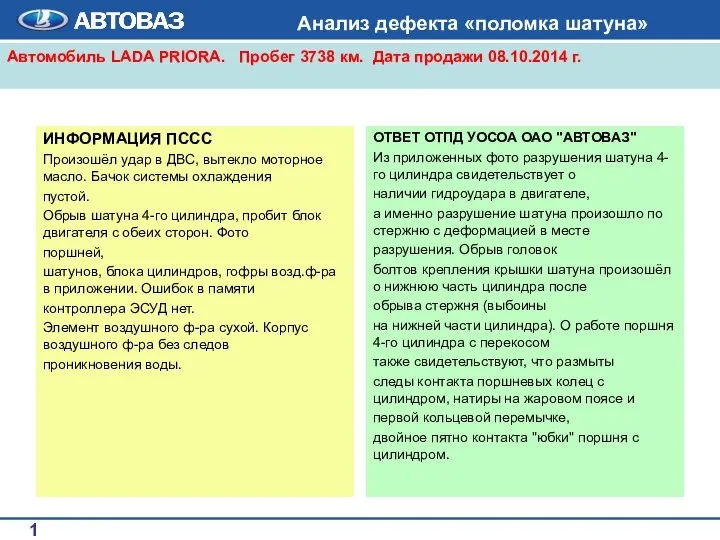 Автомобиль Lada Priora. Анализ дефекта Поломка шатуна
Автомобиль Lada Priora. Анализ дефекта Поломка шатуна Презентация на тему Теория кристаллического поля
Презентация на тему Теория кристаллического поля  Квантовая механика
Квантовая механика Презентация на тему Константин Васильев
Презентация на тему Константин Васильев  Презентация на тему Однофазный мостовой выпрямитель
Презентация на тему Однофазный мостовой выпрямитель  Три состояния вещества
Три состояния вещества Физика для одноклассников. 10 класс
Физика для одноклассников. 10 класс Классификация кристаллов на металлы, полупроводники и диэлектрики с точки зрения зонной теории
Классификация кристаллов на металлы, полупроводники и диэлектрики с точки зрения зонной теории Разделение веществ в хроматографии
Разделение веществ в хроматографии