- Типовые законы автоматического регулирования

Содержание
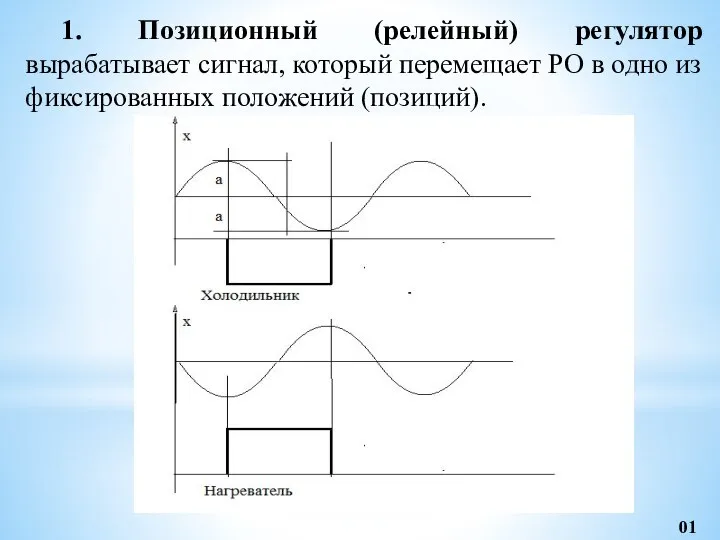
- 2. 01 1. Позиционный (релейный) регулятор вырабатывает сигнал, который перемещает РО в одно из фиксированных положений (позиций).
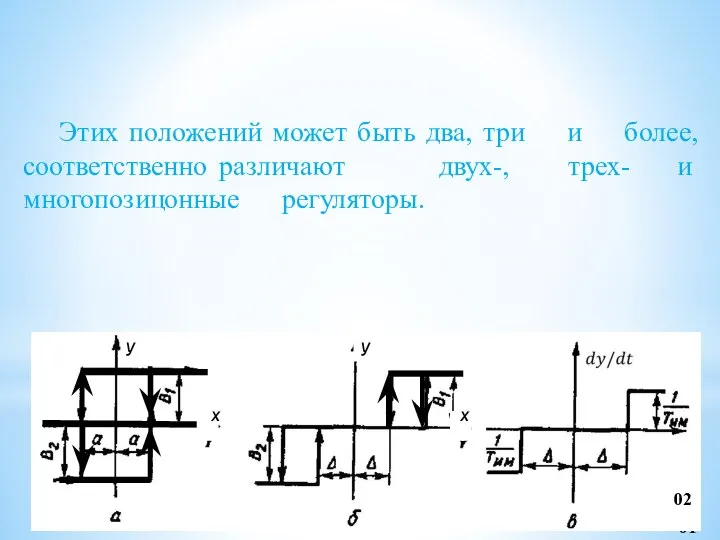
- 3. 01 y y x x 02 Этих положений может быть два, три и более, соответственно различают
- 4. Величина 2а определяет зону неоднозначности регулятора. При увеличении входной величины x (она же – выходная величина
- 5. Трехпозиционные регуляторы (рис. 1, б) в отличие от двухпозиционных кроме двух устойчивых положений — «больше» В1
- 6. 03
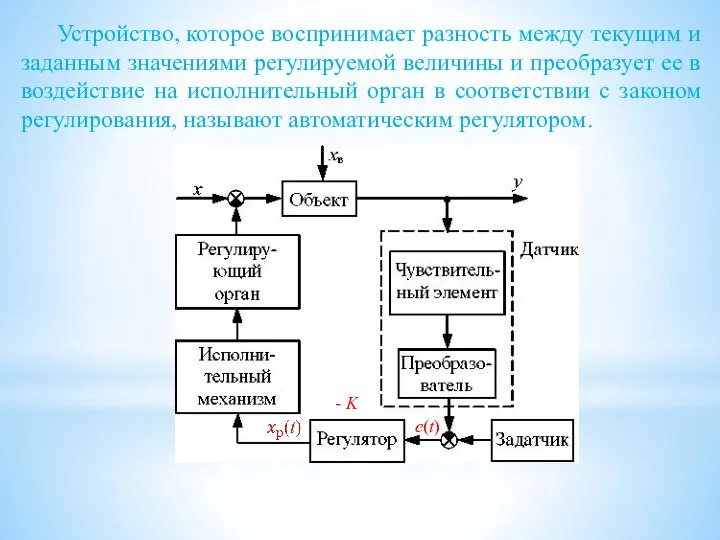
- 7. Устройство, которое воспринимает разность между текущим и заданным значениями регулируемой величины и преобразует ее в воздействие
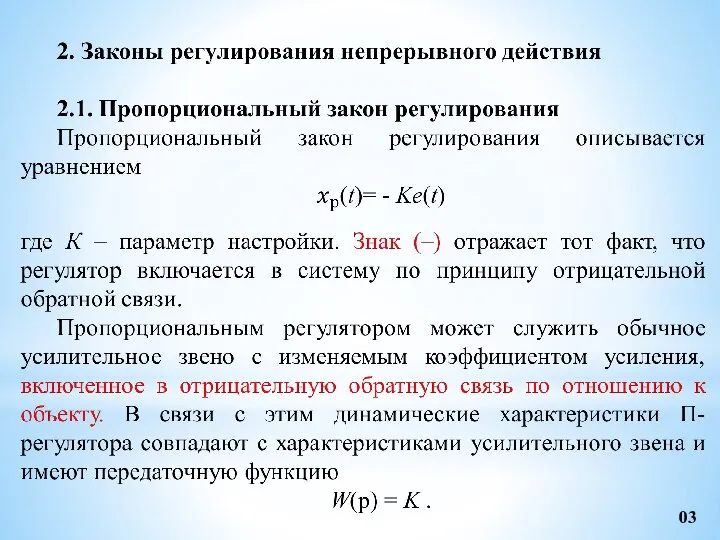
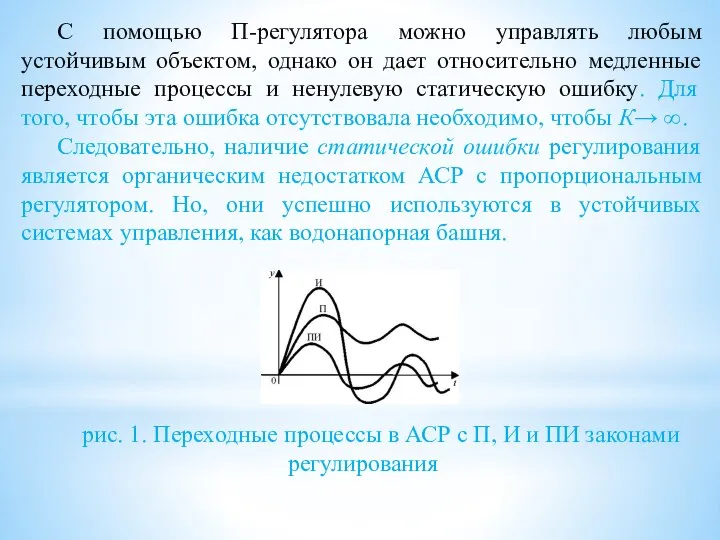
- 8. С помощью П-регулятора можно управлять любым устойчивым объектом, однако он дает относительно медленные переходные процессы и
- 9. 04
- 10. 05
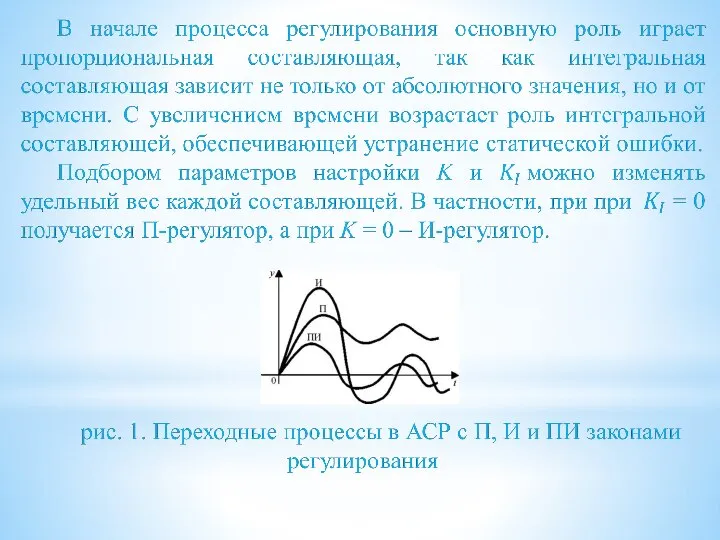
- 12. 06
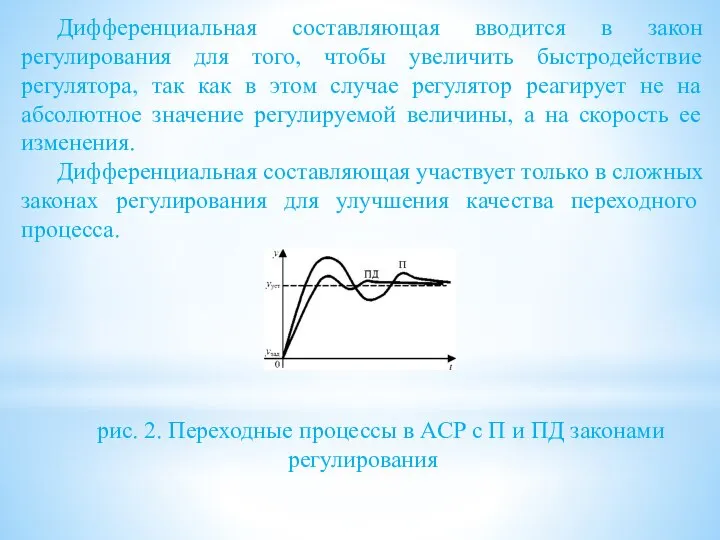
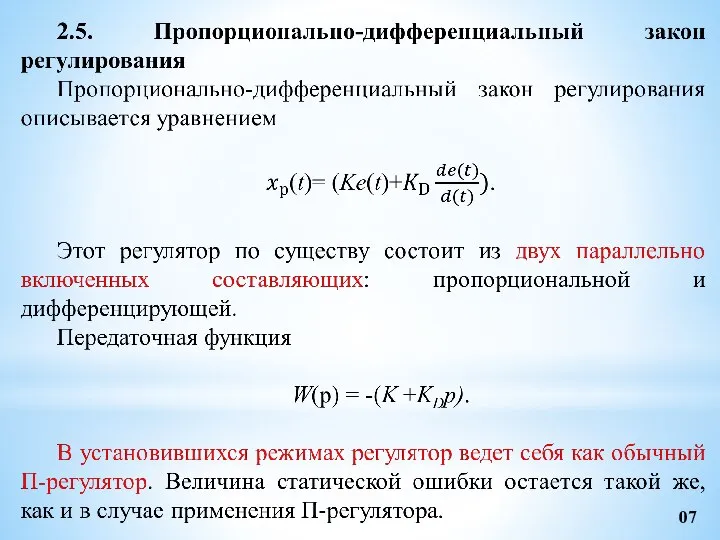
- 13. Дифференциальная составляющая вводится в закон регулирования для того, чтобы увеличить быстродействие регулятора, так как в этом
- 14. 07
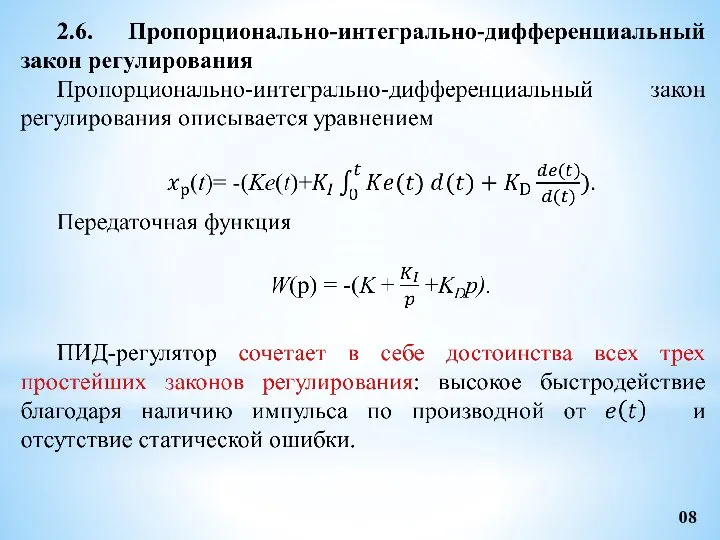
- 15. 08
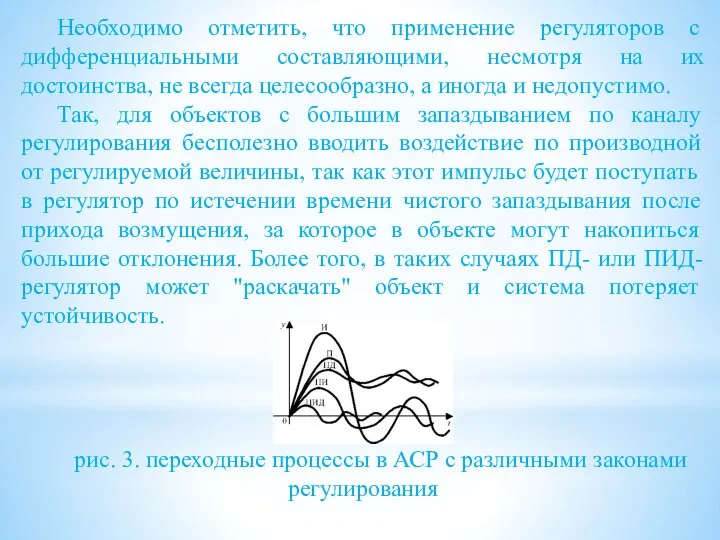
- 16. Необходимо отметить, что применение регуляторов с дифференциальными составляющими, несмотря на их достоинства, не всегда целесообразно, а
- 18. Скачать презентацию
Слайд 301
y
y
x
x
02
Этих положений может быть два, три и более, соответственно различают двух-, трех-
01
y
y
x
x
02
Этих положений может быть два, три и более, соответственно различают двух-, трех-
Слайд 4Величина 2а определяет зону неоднозначности регулятора.
При увеличении входной величины x (она
Величина 2а определяет зону неоднозначности регулятора.
При увеличении входной величины x (она
Слайд 5Трехпозиционные регуляторы (рис. 1, б) в отличие от двухпозиционных кроме двух устойчивых
Трехпозиционные регуляторы (рис. 1, б) в отличие от двухпозиционных кроме двух устойчивых
Слайд 6
03
03
Слайд 7Устройство, которое воспринимает разность между текущим и заданным значениями регулируемой величины и
Устройство, которое воспринимает разность между текущим и заданным значениями регулируемой величины и
Слайд 8С помощью П-регулятора можно управлять любым устойчивым объектом, однако он дает относительно
С помощью П-регулятора можно управлять любым устойчивым объектом, однако он дает относительно
Слайд 9
04
04
Слайд 10
05
05
Слайд 12
06
06
Слайд 13Дифференциальная составляющая вводится в закон регулирования для того, чтобы увеличить быстродействие регулятора,
Дифференциальная составляющая вводится в закон регулирования для того, чтобы увеличить быстродействие регулятора,
Слайд 14
07
07
Слайд 15
08
08
Слайд 16Необходимо отметить, что применение регуляторов с дифференциальными составляющими, несмотря на их достоинства,
Необходимо отметить, что применение регуляторов с дифференциальными составляющими, несмотря на их достоинства,
 Живой свет свечи
Живой свет свечи Разработать технологический процесс замене сцепления автомобиля КамАЗ
Разработать технологический процесс замене сцепления автомобиля КамАЗ 021
021 Електризація тіл. Види електризації
Електризація тіл. Види електризації "Масса тела. Плотность вещества".
"Масса тела. Плотность вещества". Материаловедение. Общие сведения о металлах
Материаловедение. Общие сведения о металлах Электромагнитные явления
Электромагнитные явления Инжекторная система впрыска топлива
Инжекторная система впрыска топлива Предмет Теплоносители и их свойства. Параметры состояния. Уравнения состояния газов
Предмет Теплоносители и их свойства. Параметры состояния. Уравнения состояния газов Закон Архимеда
Закон Архимеда Автотрансформаторы. Повышающий и понижающий автотрансформаторы
Автотрансформаторы. Повышающий и понижающий автотрансформаторы Презентация по физике "Колебания маятника" -
Презентация по физике "Колебания маятника" -  Пароходы и лайнеры
Пароходы и лайнеры Система питания дизельного двигателя
Система питания дизельного двигателя Теоретическая механика. Статика. Связи. Реакции связей
Теоретическая механика. Статика. Связи. Реакции связей Восстановление долот PDC
Восстановление долот PDC Оптические иллюзии
Оптические иллюзии Энергетические характеристики электрических сетей
Энергетические характеристики электрических сетей Тепловые явления. Основы молекулярно-кинетической теории (МКТ)
Тепловые явления. Основы молекулярно-кинетической теории (МКТ) Электрическое сопротивление
Электрическое сопротивление Светофор. Внеклассное мероприятие по физике
Светофор. Внеклассное мероприятие по физике Презентация на тему Последовательное соединение проводников (8 класс)
Презентация на тему Последовательное соединение проводников (8 класс)  Дифракция света
Дифракция света Механическое движение. Траектория, путь, перемещение. Относительность движения
Механическое движение. Траектория, путь, перемещение. Относительность движения svobodnoe_padenie_tel_kopiya
svobodnoe_padenie_tel_kopiya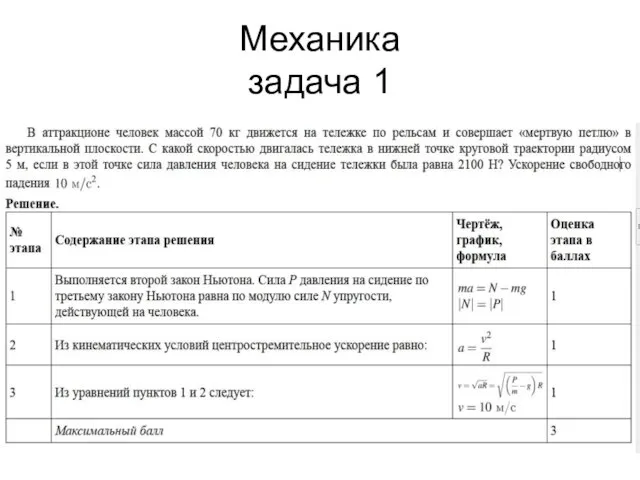 Задачи по механике
Задачи по механике Действия электрического тока
Действия электрического тока 1a6d7c9333e79136c60205a4f06afadf — копия
1a6d7c9333e79136c60205a4f06afadf — копия