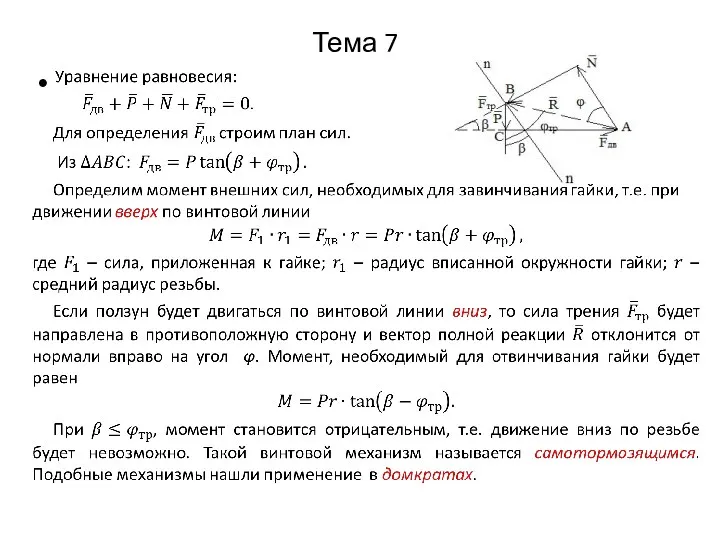
- Трение в винтовой паре

Содержание
- 2. Тема 7
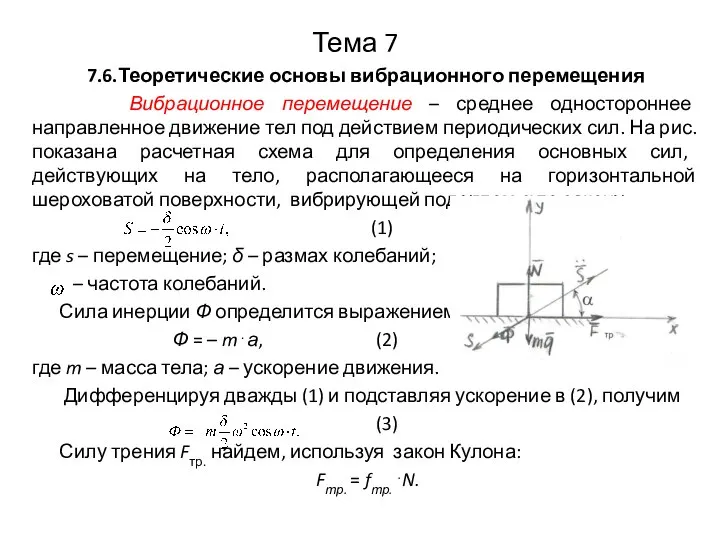
- 3. Тема 7 7.6.Теоретические основы вибрационного перемещения Вибрационное перемещение – среднее одностороннее направленное движение тел под действием
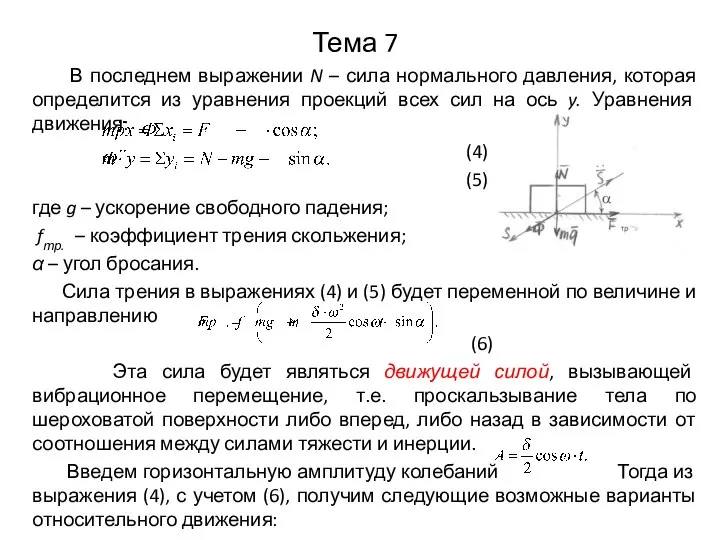
- 4. Тема 7 В последнем выражении N – сила нормального давления, которая определится из уравнения проекций всех
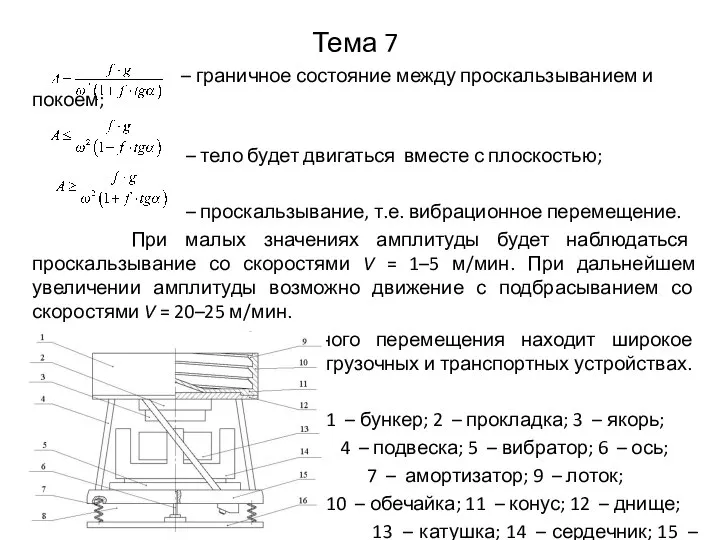
- 5. Тема 7 – граничное состояние между проскальзыванием и покоем; – тело будет двигаться вместе с плоскостью;
- 6. Тема 7 7.7. Механический КПД механизмов и машин Коэффициент полезного действия (КПД) − это безразмерная величина,
- 7. Тема 7 Тогда где коэффициент потерь, который показывает, какая часть работы движущих сил расходуется на преодоление
- 8. Тема 7 Последовательное соединение механизмов Рассмотрим машину, состоящую из последовательно соединенных механизмов, условно обозначенных на схеме
- 9. Тема 7 Найдем произведение частных КПД (2) Сравнивая (1) и (2), можно сделать вывод, что они
- 10. Тема 7 Общий КПД машины (3) Так как Подставив эти выражения в (3), получим Отсюда следует,
- 11. Тема 7 Сравним варианты последовательного и параллельного соединения механизмов с точки зрения минимизации механических потерь в
- 12. Тема 8 Тема 8. Введение в динамику машин 8.1. Основные задачи и методы динамики машин Динамика
- 13. Тема 8 Объектом изучения в динамике машин является машинный агрегат. В общем виде его можно представить
- 14. Тема 8 Работа – это физическая величина, характеризующая преобразование энергии из одной формы в другую. Элементарная
- 15. Тема 8 Кинетическая энергия – это накопленная работа, совершаемая над механической системой с целью сообщения этой
- 16. Тема 8 8.2. Выбор динамической модели машинного агрегата Машинные агрегаты являются сложными многозвенными и многосвязными электромеханическими,
- 17. Тема 8 Во всех случаях следует стремиться к использованию наиболее простых динамических моделей, адекватных исследуемым процессам.
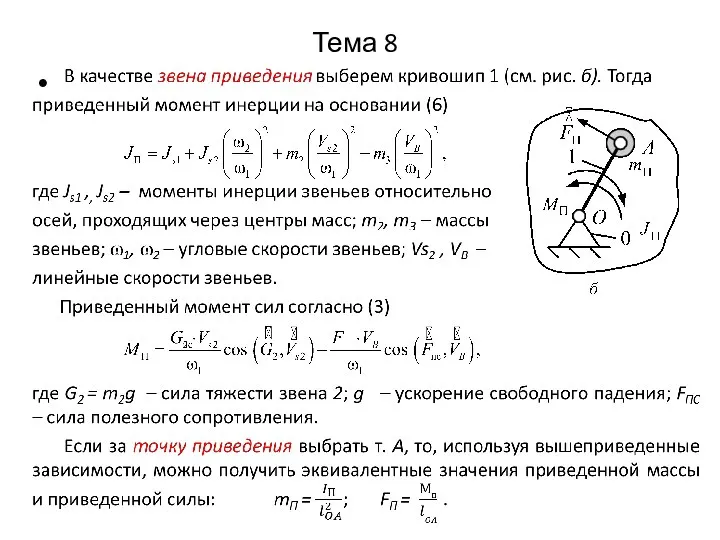
- 18. Тема 8 В качестве звена приведения целесообразно выбрать такое, которое не изменяет направление движения в пределах
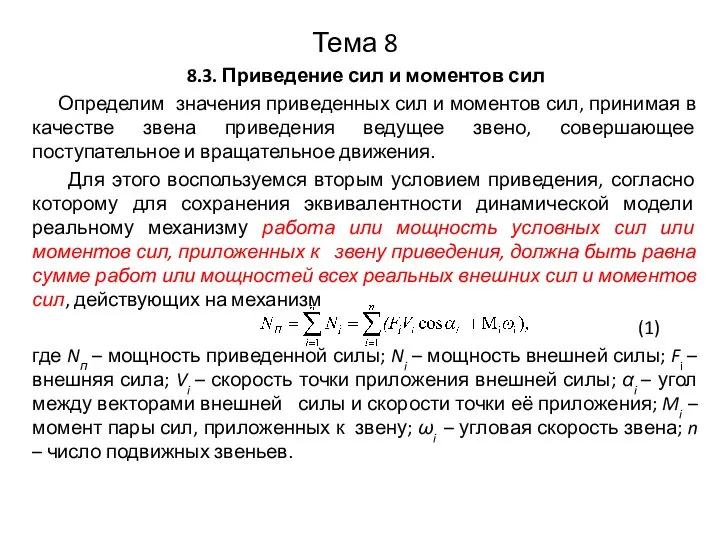
- 19. Тема 8 8.3. Приведение сил и моментов сил Определим значения приведенных сил и моментов сил, принимая
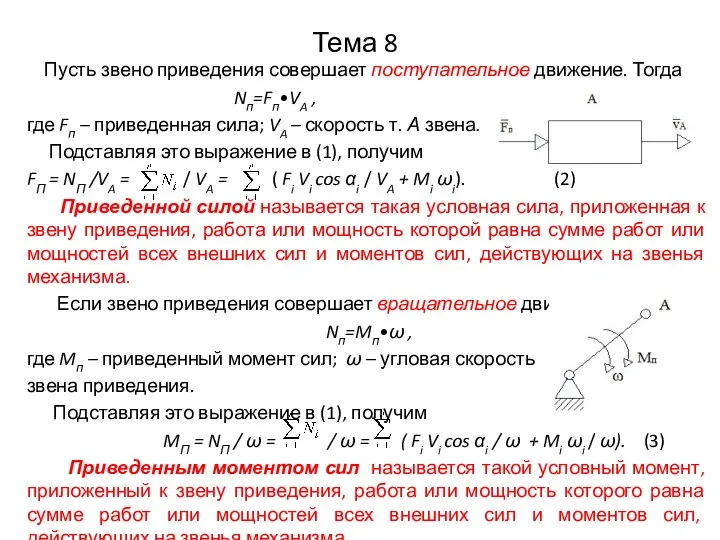
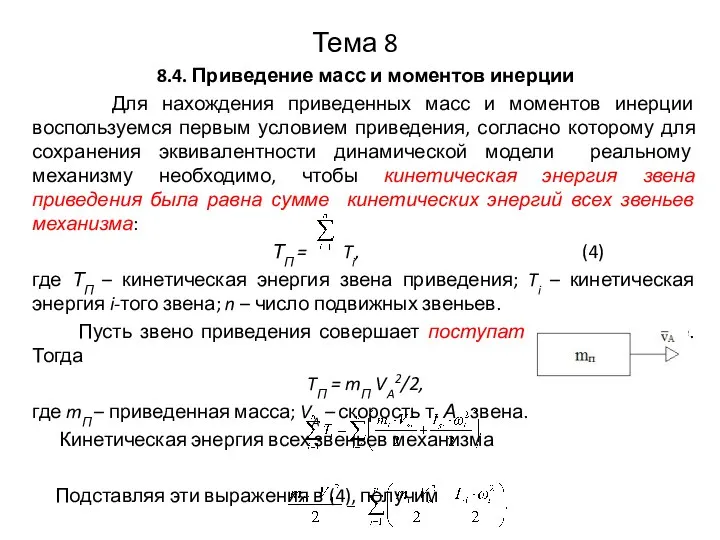
- 20. Тема 8 Пусть звено приведения совершает поступательное движение. Тогда Nп=Fп•VA , где Fп – приведенная сила;
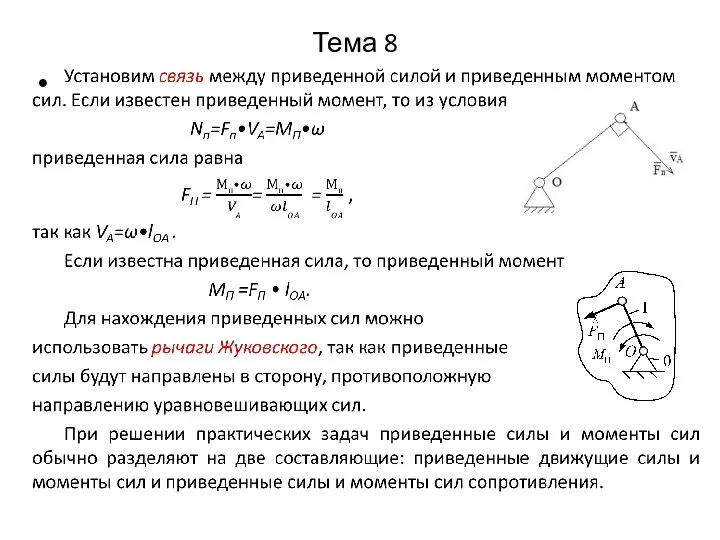
- 21. Тема 8
- 22. Тема 8 8.4. Приведение масс и моментов инерции Для нахождения приведенных масс и моментов инерции воспользуемся
- 23. Тема 8
- 24. Тема 8
- 25. Тема 8
- 26. Тема 8
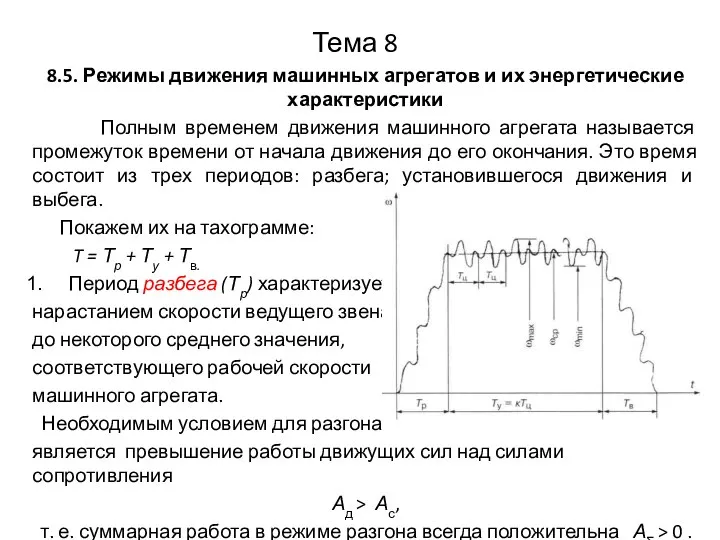
- 27. Тема 8 8.5. Режимы движения машинных агрегатов и их энергетические характеристики Полным временем движения машинного агрегата
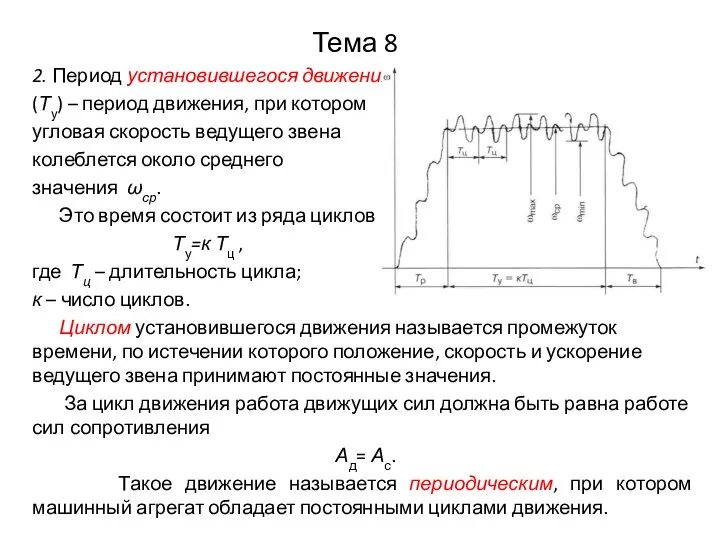
- 28. Тема 8 2. Период установившегося движения (Ту) – период движения, при котором угловая скорость ведущего звена
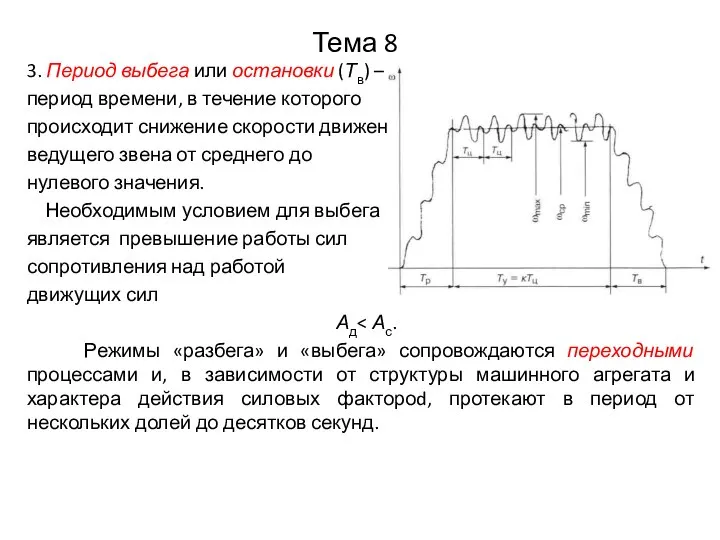
- 29. Тема 8 3. Период выбега или остановки (Тв) – период времени, в течение которого происходит снижение
- 30. Тема 8 Исследование переходных режимов необходимо для нахождения времени срабатывания машинного агрегата, которое определяет быстродействие многих
- 31. Тема 8 В режиме установившегося движения работает большинство технологических и энергетических машин: металлорежущие станки, кривошипные прессы,
- 33. Скачать презентацию
Слайд 3Тема 7
7.6.Теоретические основы вибрационного перемещения
Вибрационное перемещение – среднее одностороннее направленное движение
Тема 7
7.6.Теоретические основы вибрационного перемещения
Вибрационное перемещение – среднее одностороннее направленное движение
Слайд 4Тема 7
В последнем выражении N – сила нормального давления, которая определится
Тема 7
В последнем выражении N – сила нормального давления, которая определится
Слайд 5Тема 7
– граничное состояние между проскальзыванием и покоем;
– тело будет
Тема 7
– граничное состояние между проскальзыванием и покоем;
– тело будет
Слайд 6Тема 7
7.7. Механический КПД механизмов и машин
Коэффициент полезного действия (КПД) −
Тема 7
7.7. Механический КПД механизмов и машин
Коэффициент полезного действия (КПД) −
Слайд 7Тема 7
Тогда
где коэффициент потерь, который показывает, какая часть работы движущих
Тема 7
Тогда
где коэффициент потерь, который показывает, какая часть работы движущих
Слайд 8Тема 7
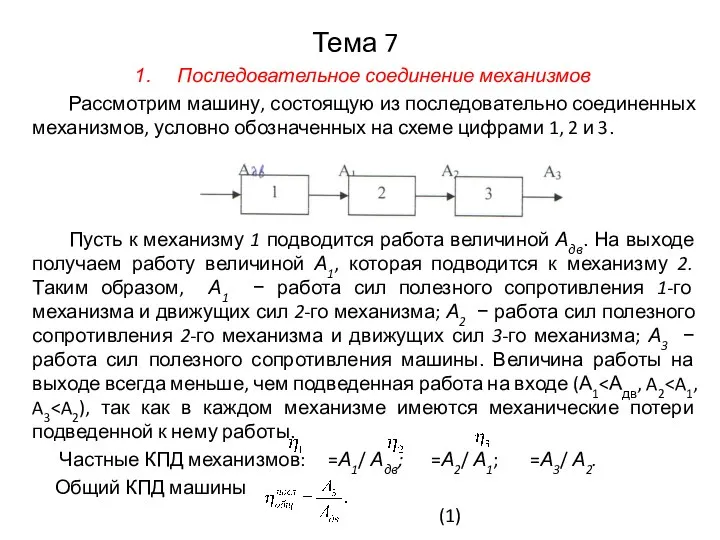
Последовательное соединение механизмов
Рассмотрим машину, состоящую из последовательно соединенных механизмов, условно
Тема 7
Последовательное соединение механизмов
Рассмотрим машину, состоящую из последовательно соединенных механизмов, условно
Слайд 9Тема 7
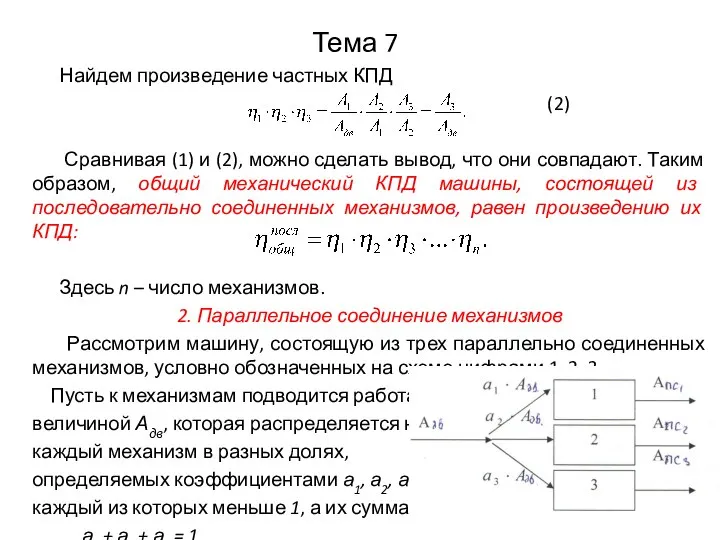
Найдем произведение частных КПД
(2)
Сравнивая (1) и (2), можно
Тема 7
Найдем произведение частных КПД
(2)
Сравнивая (1) и (2), можно
Слайд 10Тема 7
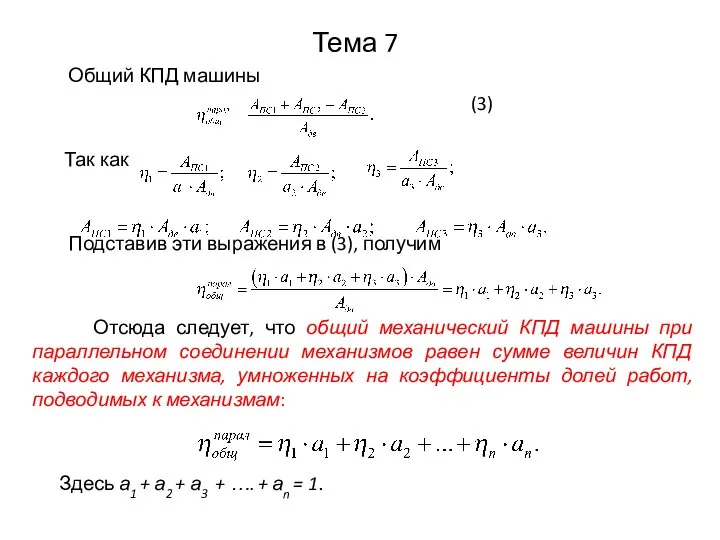
Общий КПД машины
(3)
Так как
Подставив эти выражения в (3),
Тема 7
Общий КПД машины
(3)
Так как
Подставив эти выражения в (3),
Слайд 11Тема 7
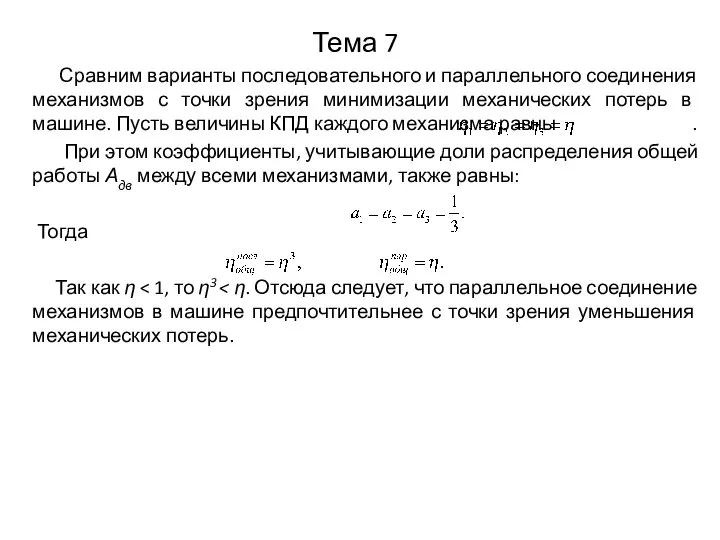
Сравним варианты последовательного и параллельного соединения механизмов с точки зрения
Тема 7
Сравним варианты последовательного и параллельного соединения механизмов с точки зрения
Слайд 12Тема 8
Тема 8. Введение в динамику машин
8.1. Основные задачи и методы динамики
Тема 8
Тема 8. Введение в динамику машин
8.1. Основные задачи и методы динамики
Слайд 13Тема 8
Объектом изучения в динамике машин является машинный агрегат. В общем
Тема 8
Объектом изучения в динамике машин является машинный агрегат. В общем
Слайд 14Тема 8
Работа – это физическая величина, характеризующая преобразование энергии из одной формы в
Тема 8
Работа – это физическая величина, характеризующая преобразование энергии из одной формы в
Слайд 15Тема 8
Кинетическая энергия – это накопленная работа, совершаемая
над механической системой с целью сообщения
Тема 8
Кинетическая энергия – это накопленная работа, совершаемая над механической системой с целью сообщения
Слайд 16Тема 8
8.2. Выбор динамической модели машинного агрегата
Машинные агрегаты являются сложными многозвенными
Тема 8
8.2. Выбор динамической модели машинного агрегата
Машинные агрегаты являются сложными многозвенными
Слайд 17Тема 8
Во всех случаях следует стремиться к использованию наиболее простых динамических
Тема 8
Во всех случаях следует стремиться к использованию наиболее простых динамических
Слайд 18Тема 8
В качестве звена приведения целесообразно выбрать такое, которое не изменяет
Тема 8
В качестве звена приведения целесообразно выбрать такое, которое не изменяет
Слайд 19Тема 8
8.3. Приведение сил и моментов сил
Определим значения приведенных сил и
Тема 8
8.3. Приведение сил и моментов сил
Определим значения приведенных сил и
Слайд 20Тема 8
Пусть звено приведения совершает поступательное движение. Тогда
Nп=Fп•VA ,
где Fп
Тема 8
Пусть звено приведения совершает поступательное движение. Тогда
Nп=Fп•VA ,
где Fп
Слайд 21Тема 8
Тема 8
Слайд 22Тема 8
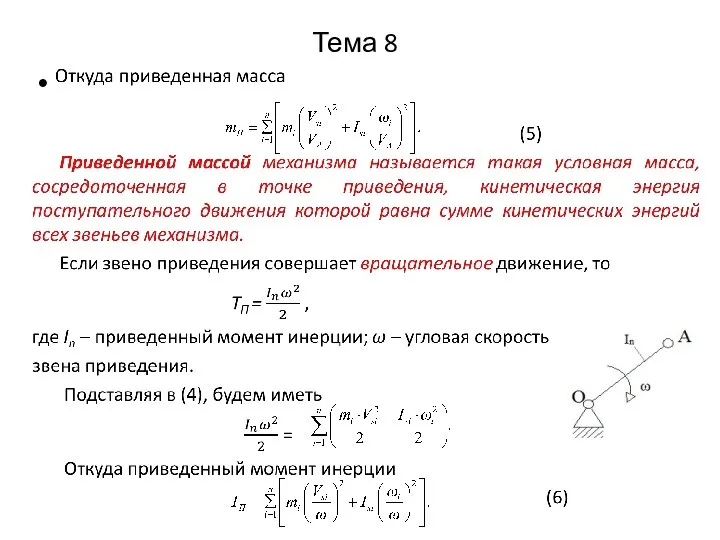
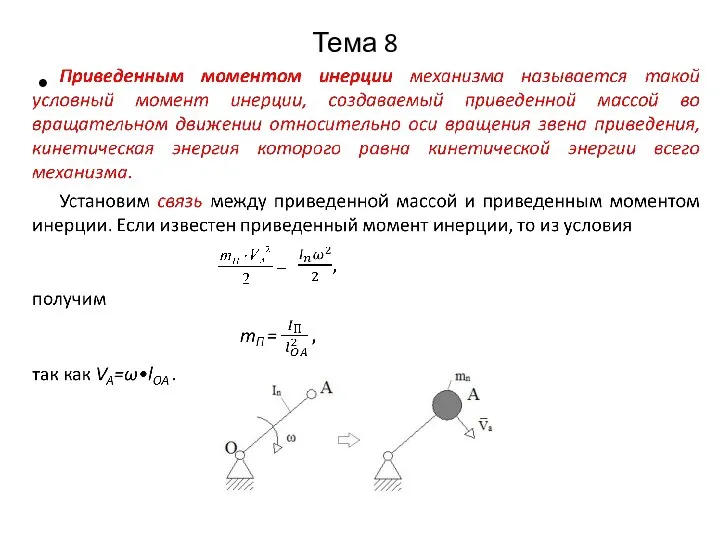
8.4. Приведение масс и моментов инерции
Для нахождения приведенных масс
Тема 8
8.4. Приведение масс и моментов инерции
Для нахождения приведенных масс
Слайд 23Тема 8
Тема 8
Слайд 24Тема 8
Тема 8
Слайд 25Тема 8
Тема 8
Слайд 26Тема 8
Тема 8
Слайд 27Тема 8
8.5. Режимы движения машинных агрегатов и их энергетические характеристики
Полным временем
Тема 8
8.5. Режимы движения машинных агрегатов и их энергетические характеристики
Полным временем
Слайд 28Тема 8
2. Период установившегося движения
(Ту) – период движения, при котором
угловая скорость
Тема 8
2. Период установившегося движения
(Ту) – период движения, при котором
угловая скорость
Слайд 29Тема 8
3. Период выбега или остановки (Тв) –
период времени, в течение
Тема 8
3. Период выбега или остановки (Тв) –
период времени, в течение
Слайд 30Тема 8
Исследование переходных режимов необходимо для нахождения времени срабатывания машинного агрегата,
Тема 8
Исследование переходных режимов необходимо для нахождения времени срабатывания машинного агрегата,
Слайд 31Тема 8
В режиме установившегося движения работает большинство технологических и энергетических машин:
Тема 8
В режиме установившегося движения работает большинство технологических и энергетических машин:
 Магнитное поле
Магнитное поле Элективный курс физика и искусство
Элективный курс физика и искусство Монтаж оптических кабелей
Монтаж оптических кабелей Классификация навигационных систем. Параметры движения в пространстве
Классификация навигационных систем. Параметры движения в пространстве Кросс-дисциплинарный межфакультетский учебный модуль КВАНТУМ
Кросс-дисциплинарный межфакультетский учебный модуль КВАНТУМ Электрический ток в жидкостях
Электрический ток в жидкостях ВКР: Система стеклоочистки лобового стекла
ВКР: Система стеклоочистки лобового стекла Исследование электромагнитного загрязения города Челябинска
Исследование электромагнитного загрязения города Челябинска Циркуляция вектора напряженности. Расчеты потенциальных полей. (Лекция 15)
Циркуляция вектора напряженности. Расчеты потенциальных полей. (Лекция 15) Бірігіп жұмыс жасайтын квадрокоптерлер динамикасы мен басқарылуы
Бірігіп жұмыс жасайтын квадрокоптерлер динамикасы мен басқарылуы Правило Ленца
Правило Ленца Электризация тел. Взаимодействие заряженных тел
Электризация тел. Взаимодействие заряженных тел Механическое движение
Механическое движение Силы инерции. Лекция 9
Силы инерции. Лекция 9 Международная система единиц. Единство измерений. Лекция № 2
Международная система единиц. Единство измерений. Лекция № 2 Дисковый тормоз
Дисковый тормоз Фотометрия. Дисперсия света
Фотометрия. Дисперсия света Случайности не случайны! А вас бьет током? 4 класс
Случайности не случайны! А вас бьет током? 4 класс Электрическое сопротивление
Электрическое сопротивление Закон Кулона
Закон Кулона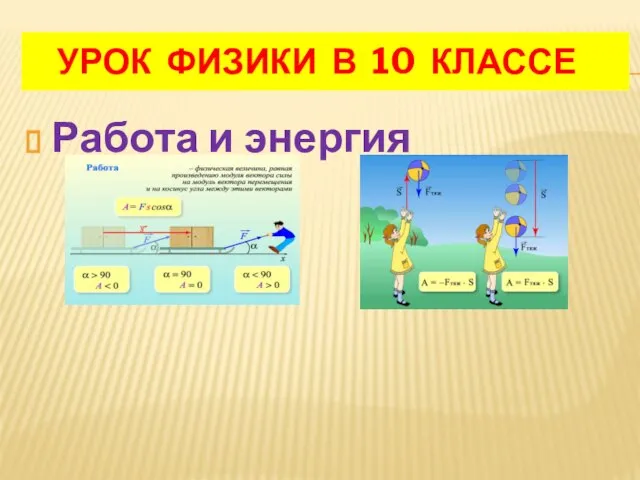 Работа и энергия
Работа и энергия Детали машин и основы конструирования. Проектирование и его структура. Технологичность. (Лекция 2)
Детали машин и основы конструирования. Проектирование и его структура. Технологичность. (Лекция 2) Механічна робота, потужність
Механічна робота, потужність Методы наблюдения и регистрации элементарных частиц
Методы наблюдения и регистрации элементарных частиц Изотопы
Изотопы Ременные передачи
Ременные передачи Вес тела. Невесомость
Вес тела. Невесомость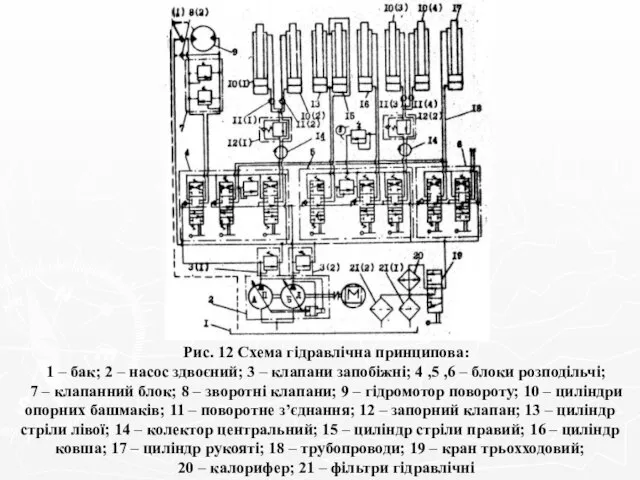 Схема гідравлічна принципова. Билет 7
Схема гідравлічна принципова. Билет 7