Slaidy.com
Алгебра
Английский язык
Астрономия
Биология
География
Геометрия
Информатика
История
Литература
Математика
Медицина
Музыка
МХК
ОБЖ
Обществознание
Педагогика
Немецкий язык
Русский язык
Технология
Физика
Философия
Химия
Экология
Экономика
Детские презентации
Шаблоны презентаций
Разное
Культурология
Окружающий мир
Виды движения. Основные особенности
Март 1, 2021
Главная
Физика
Виды движения. Основные особенности
Содержание
2.
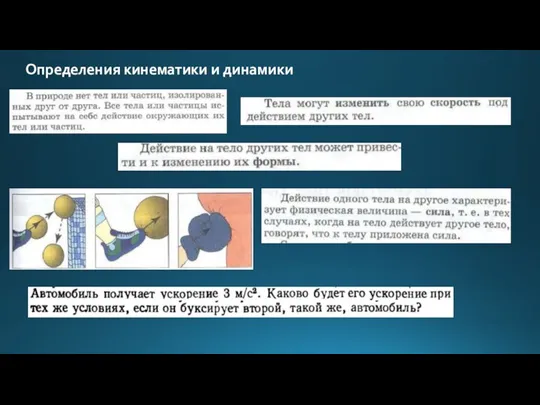
Определения кинематики и динамики
5.
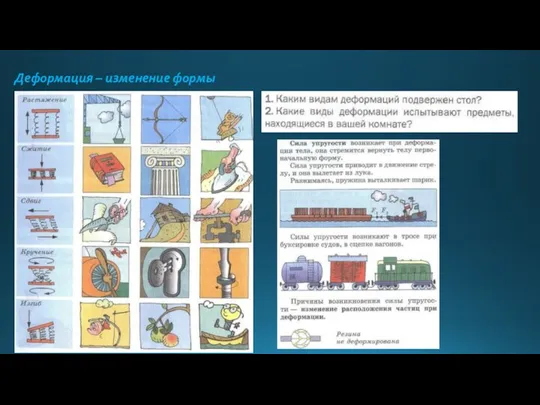
Деформация – изменение формы
9.
Скачать презентацию
Слайд 2
Определения кинематики и динамики
Слайд 3
Слайд 4
Слайд 5
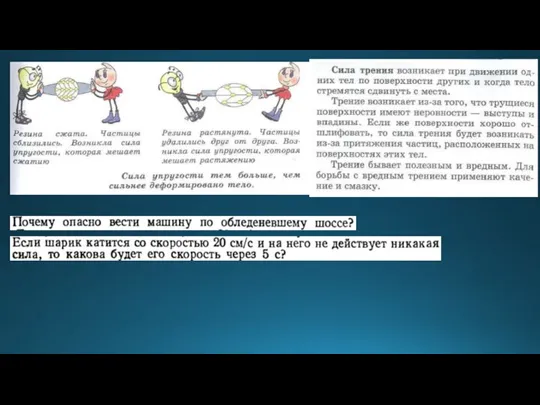
Деформация – изменение формы
Слайд 6
Слайд 7
Имя файла: Виды-движения.-Основные-особенности.pptx
Количество просмотров: 129
Количество скачиваний: 0
Скачать
- Предыдущая
Александр Александрович Блок
Следующая -
Каменный век и новые технологии в РСО
Похожие презентации
Презентация на тему Виды излучений
Порядок заправки верхней и нижней нити
Экзотические типы радиоактивного распада
Лекция 25
Последовательное соединение проводников
Силы в природе
Исследование тепловых процессов в гетероинтегрированных многокристальных микромодулях на основе кремния для СВЧ применений
Характеристика ламп
Использование светоотражающих элементов
Технология. Ядерная энергия
Движение по окружности. Решение задач
Ядерные реакции под действием нейтронов
Открытие и применение закона всемирного тяготения
Трансформатор в физике
Электромагнитная индукция
Динамическая метеорология. Термический ветер
Элементарные процессы в низкотемпературной плазме
Наблюдения и опыты
Космические скорости. 10 класс
Явление самоиндукции. Индуктивность
Что такое энергия?
Свойства грунтов
Основные процессы поглощения энергии фотонов высокоэнергетических эми
Численное решение теплепроводностью
Призма. Аберрации. Фотометрия. Интерференция
Замедляющие структуры
Влажность воздуха. Насыщенный и ненасыщенный пар
Разрывной максвеллиан со смещением. Аппроксимация функции распределения. Плотность потока массы

 Презентация на тему Виды излучений
Презентация на тему Виды излучений  Порядок заправки верхней и нижней нити
Порядок заправки верхней и нижней нити Экзотические типы радиоактивного распада
Экзотические типы радиоактивного распада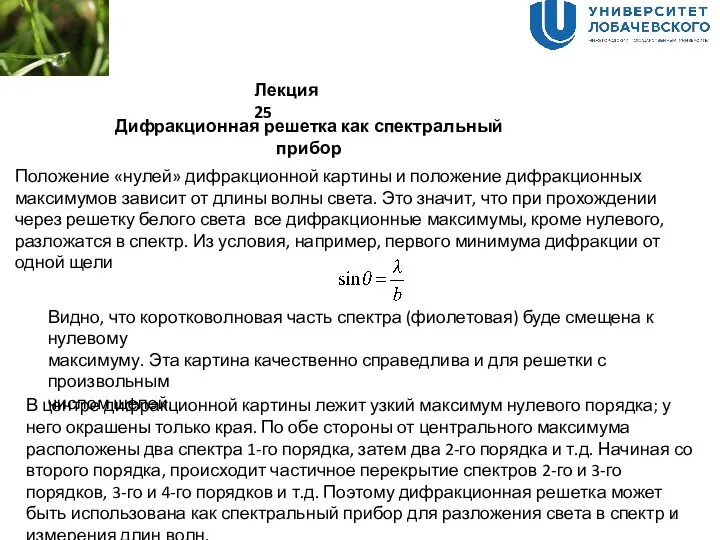 Лекция 25
Лекция 25 Последовательное соединение проводников
Последовательное соединение проводников Силы в природе
Силы в природе Исследование тепловых процессов в гетероинтегрированных многокристальных микромодулях на основе кремния для СВЧ применений
Исследование тепловых процессов в гетероинтегрированных многокристальных микромодулях на основе кремния для СВЧ применений Характеристика ламп
Характеристика ламп Использование светоотражающих элементов
Использование светоотражающих элементов Технология. Ядерная энергия
Технология. Ядерная энергия Движение по окружности. Решение задач
Движение по окружности. Решение задач Ядерные реакции под действием нейтронов
Ядерные реакции под действием нейтронов Открытие и применение закона всемирного тяготения
Открытие и применение закона всемирного тяготения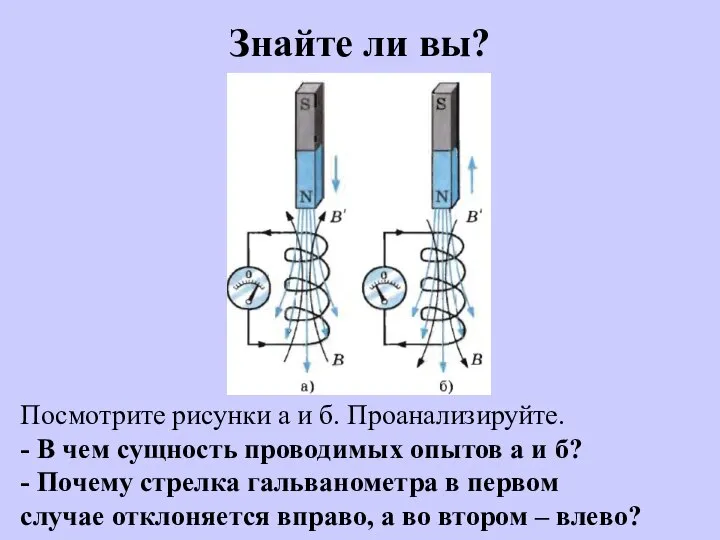 Трансформатор в физике
Трансформатор в физике Электромагнитная индукция
Электромагнитная индукция Динамическая метеорология. Термический ветер
Динамическая метеорология. Термический ветер Элементарные процессы в низкотемпературной плазме
Элементарные процессы в низкотемпературной плазме Наблюдения и опыты
Наблюдения и опыты Космические скорости. 10 класс
Космические скорости. 10 класс Явление самоиндукции. Индуктивность
Явление самоиндукции. Индуктивность Что такое энергия?
Что такое энергия? Свойства грунтов
Свойства грунтов Основные процессы поглощения энергии фотонов высокоэнергетических эми
Основные процессы поглощения энергии фотонов высокоэнергетических эми Численное решение теплепроводностью
Численное решение теплепроводностью Призма. Аберрации. Фотометрия. Интерференция
Призма. Аберрации. Фотометрия. Интерференция Замедляющие структуры
Замедляющие структуры Влажность воздуха. Насыщенный и ненасыщенный пар
Влажность воздуха. Насыщенный и ненасыщенный пар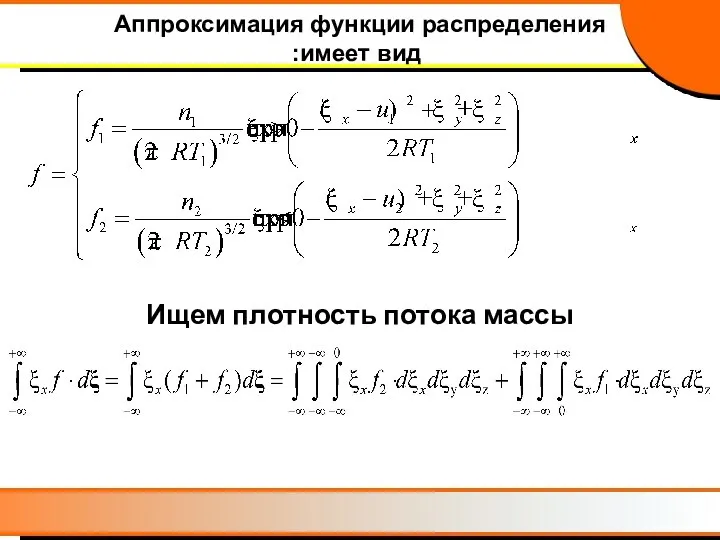 Разрывной максвеллиан со смещением. Аппроксимация функции распределения. Плотность потока массы
Разрывной максвеллиан со смещением. Аппроксимация функции распределения. Плотность потока массы