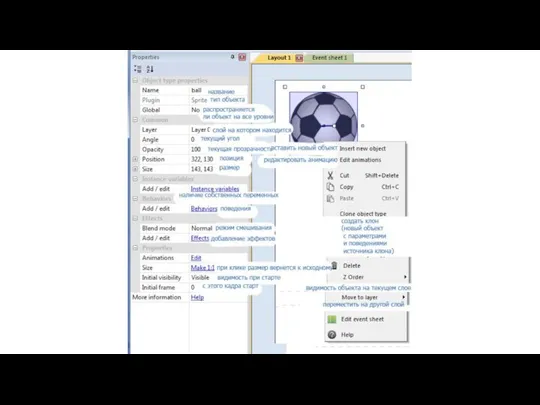
Слайд 8У простой копии спрайта для удобства созданы несколько параметров для управления каждой
копией:
1) Приватная переменная ‘instance variable’ позволяет хранить свое значение для каждой копии спрайта (не все события и действия позволяют выбирать отдельную копию спрайта).
2) У каждой копии есть Uid (уникальный идентификационный номер) который присваивается при старте игры.
3) У спрайта есть счетчик количества копий ‘count’
У каждого объекта есть направление ‘angle’ От 0 до 360 градусов. По умолчанию 0 направлен влево.

 Аналитика результатов рекламной кампании. Подготовка отчетности
Аналитика результатов рекламной кампании. Подготовка отчетности Коммуникация и общество
Коммуникация и общество Поиск информации в интернете. 11 класс
Поиск информации в интернете. 11 класс Использование 3D max для создания домика
Использование 3D max для создания домика Решение логической задачи соки. Рабочая тетрадь №41 стр.36
Решение логической задачи соки. Рабочая тетрадь №41 стр.36 Прерывания
Прерывания 52025.pptx (1)
52025.pptx (1) Определение количества информации
Определение количества информации Декларация независимости киберпространства Дж.Д.Барлоу
Декларация независимости киберпространства Дж.Д.Барлоу DZ Python
DZ Python Компьютерная память. Внутренняя память
Компьютерная память. Внутренняя память Базы данных. Запрос параметров
Базы данных. Запрос параметров Автоматические установщики для ПК/ноутбуков Msoft и смартфонов Яндекс.Addapter
Автоматические установщики для ПК/ноутбуков Msoft и смартфонов Яндекс.Addapter анализ конкурентов презентация
анализ конкурентов презентация Иконография. Детство – какое оно
Иконография. Детство – какое оно Введение в базовый синтаксис
Введение в базовый синтаксис Методы борьбы с legacy-кодом на примере GitLab
Методы борьбы с legacy-кодом на примере GitLab Зачем компьютеру программное обеспечение
Зачем компьютеру программное обеспечение Графический интерфейс операционной системы Linux
Графический интерфейс операционной системы Linux Анализ поверхности
Анализ поверхности O Python. Лекция 1
O Python. Лекция 1 Руководство программиста
Руководство программиста Инструкция для обучающихся КазНМУ по тестированию с прокторингом
Инструкция для обучающихся КазНМУ по тестированию с прокторингом Персональный компьютер (часть 1)
Персональный компьютер (часть 1) Word мәтіндік редакторында кесте тұру турлендіру
Word мәтіндік редакторында кесте тұру турлендіру Примеры использования инноваций в подготовке специалистов по техническим специальностям
Примеры использования инноваций в подготовке специалистов по техническим специальностям Сравнение строк в C#
Сравнение строк в C# Вирусное ПО
Вирусное ПО