- Движение манипулятора. Программа автоматического управления манипулятором

Содержание
- 2. Подготовка Открыть программу написанную ранее Робота не включать Робота не подключать Напишем автоматическое управление манипулятором У
- 3. Начальное состояние программы
- 4. Программа управления Начальное состояние манипулятора Захват открыт, поворот направо, положение назад и вниз //начальное состояние zahv.write(70);
- 5. Программа Записать сюда
- 6. Положение конечное Конечное положение Захват закрыт, поворот налево, положение вперед и вверх //конечное состояние zahv.write(110); //захват
- 7. Программа Запись сюда
- 8. Проверка Сделаем чтоб из начального состояния манипулятор устанавливался в конечное и назад в начальное и так
- 9. Программирование робота Теперь подключи робота к ПК Проверь порт и плату Запрограммируй робота Отключи робота от
- 11. Скачать презентацию
Слайд 2Подготовка
Открыть программу написанную ранее
Робота не включать
Робота не подключать
Напишем автоматическое управление манипулятором
У тебя
Подготовка
Открыть программу написанную ранее
Робота не включать
Робота не подключать
Напишем автоматическое управление манипулятором
У тебя
Слайд 3Начальное состояние программы
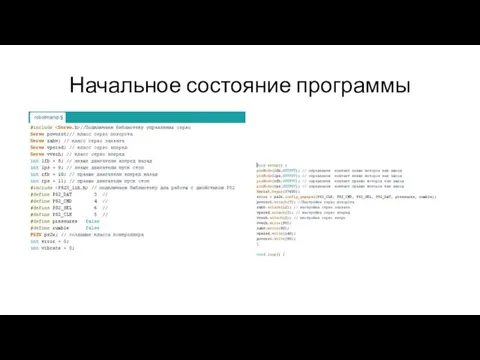
Начальное состояние программы
Слайд 4Программа управления
Начальное состояние манипулятора
Захват открыт, поворот направо, положение назад и вниз
//начальное состояние
zahv.write(70);
Программа управления
Начальное состояние манипулятора
Захват открыт, поворот направо, положение назад и вниз
//начальное состояние
zahv.write(70);
Слайд 5Программа
Записать сюда
Программа
Записать сюда
Слайд 6Положение конечное
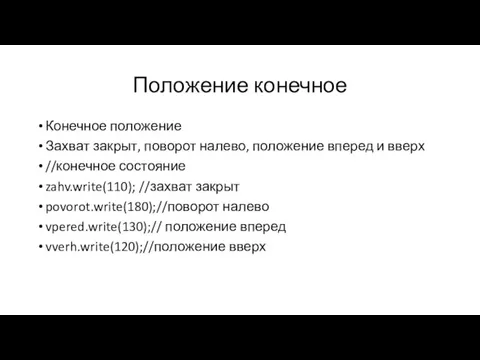
Конечное положение
Захват закрыт, поворот налево, положение вперед и вверх
//конечное состояние
zahv.write(110); //захват
Положение конечное
Конечное положение
Захват закрыт, поворот налево, положение вперед и вверх
//конечное состояние
zahv.write(110); //захват
Слайд 7Программа
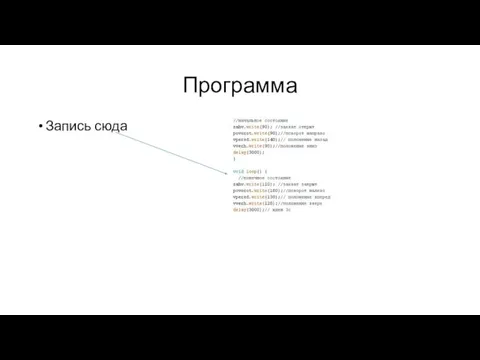
Запись сюда
Программа
Запись сюда
Слайд 8Проверка
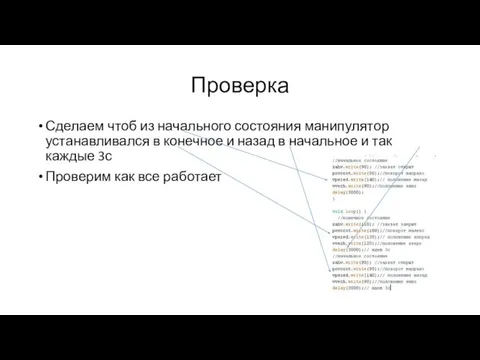
Сделаем чтоб из начального состояния манипулятор устанавливался в конечное и назад в
Проверка
Сделаем чтоб из начального состояния манипулятор устанавливался в конечное и назад в
Слайд 9Программирование робота
Теперь подключи робота к ПК
Проверь порт и плату
Запрограммируй робота
Отключи робота от
Программирование робота
Теперь подключи робота к ПК
Проверь порт и плату
Запрограммируй робота
Отключи робота от
 Данные, информация, документы. Лекция №1
Данные, информация, документы. Лекция №1 Построение таблиц истинности
Построение таблиц истинности Современные веб-технологии. Лекция 2.1
Современные веб-технологии. Лекция 2.1 Jobs Guessing Game
Jobs Guessing Game Презентация "Кодирование изображения" - скачать презентации по Информатике
Презентация "Кодирование изображения" - скачать презентации по Информатике Техника безопасности в компьютерном классе
Техника безопасности в компьютерном классе Программа Tinkercad и сервис Circuits. Практическая работа № 2
Программа Tinkercad и сервис Circuits. Практическая работа № 2 Добавление и редактирование текста
Добавление и редактирование текста Транзакции и параллелизм
Транзакции и параллелизм 1_2_1
1_2_1 Администратор баз данных областное автономное учреждение социального обслуживания
Администратор баз данных областное автономное учреждение социального обслуживания Обработка массива целых чисел из файла
Обработка массива целых чисел из файла Oracle Application Express - что это такое?
Oracle Application Express - что это такое? Введение_в_web_программирование
Введение_в_web_программирование Структура информатики
Структура информатики Лекція1_
Лекція1_ Летние онлайн-смены
Летние онлайн-смены Архивация данных
Архивация данных Отчёт за 23.01.17-07.02.17. По плану транзит
Отчёт за 23.01.17-07.02.17. По плану транзит Использование медиапространства в целях повышения мотивации и эффективности воспитательной деятельности
Использование медиапространства в целях повышения мотивации и эффективности воспитательной деятельности Безопасный интернет. Как избежать опасностей?
Безопасный интернет. Как избежать опасностей?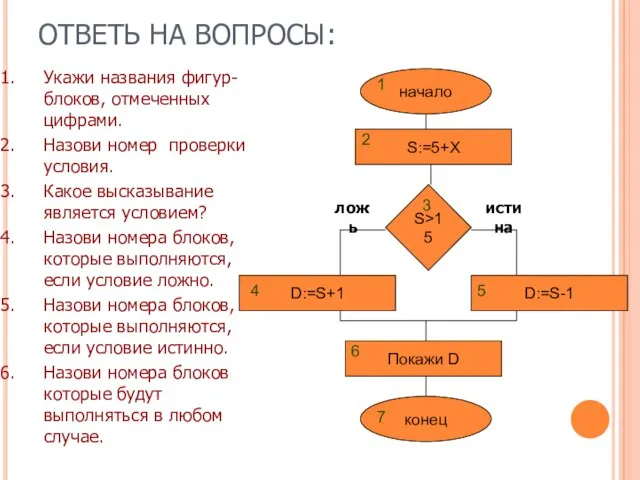 Простые и сложные высказывания
Простые и сложные высказывания Типы данных в VBA
Типы данных в VBA Как заполнить Google форму?
Как заполнить Google форму? Доступ к сервису мои достижения
Доступ к сервису мои достижения 1С:Университет ПРОФ. Общая информация о решении
1С:Университет ПРОФ. Общая информация о решении Введение в алгоритмы DM
Введение в алгоритмы DM Образование на основе онлайновых социальных сетей
Образование на основе онлайновых социальных сетей