- Імітаційне моделювання роботизованої виробничої ділянки

Содержание
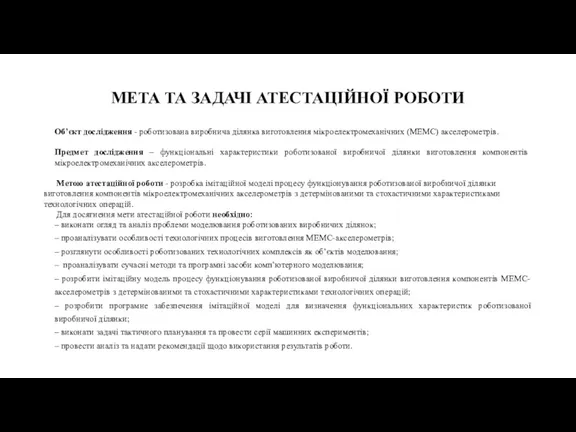
- 2. МЕТА ТА ЗАДАЧІ АТЕСТАЦІЙНОЇ РОБОТИ Об’єкт дослідження - роботизована виробнича ділянка виготовлення мікроелектромеханічних (МЕМС) акселерометрів. Предмет
- 3. Обладнання роботизованих технологічних комплексів Токарний роботизований комплекс SL-20APL Шліфувальний роботизований комплекс Промисловий робот RV6L «Reis» (Німеччина)
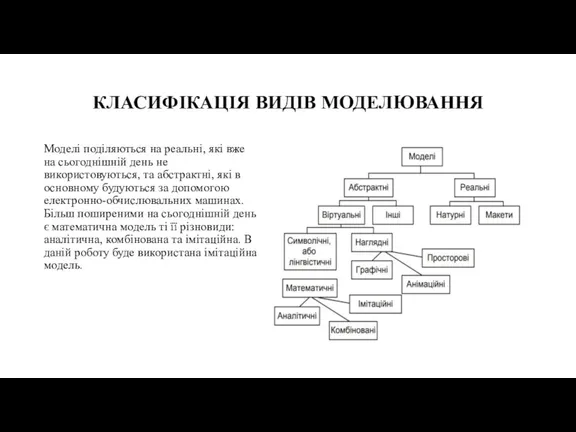
- 4. КЛАСИФІКАЦІЯ ВИДІВ МОДЕЛЮВАННЯ Моделі поділяються на реальні, які вже на сьогоднішній день не використовуються, та абстрактні,
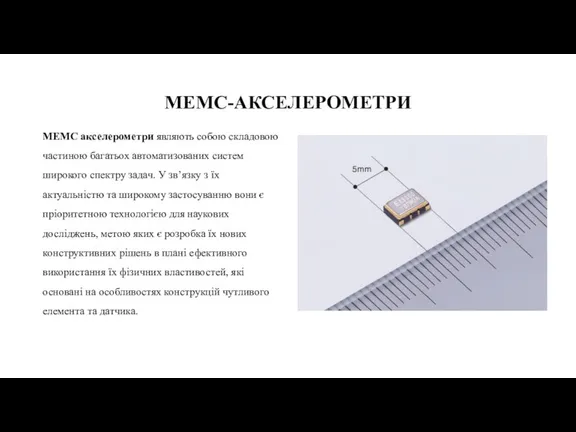
- 5. МЕМС-АКСЕЛЕРОМЕТРИ МЕМС акселерометри являють собою складовою частиною багатьох автоматизованих систем широкого спектру задач. У зв’язку з
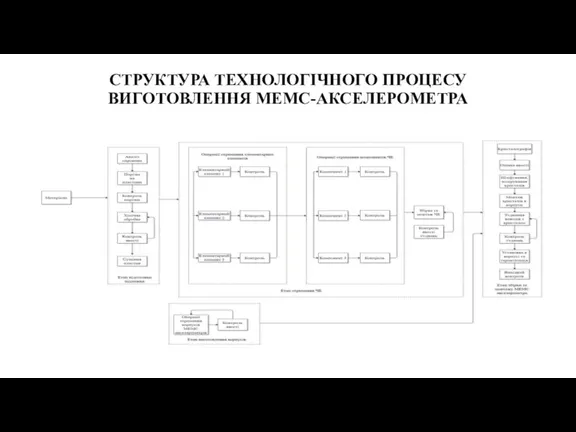
- 6. СТРУКТУРА ТЕХНОЛОГІЧНОГО ПРОЦЕСУ ВИГОТОВЛЕННЯ МЕМС-АКСЕЛЕРОМЕТРА
- 7. ПАКЕТ ІМІТАЦІЙНОГО МОДЕЛЮВАННЯ GPSSW GPSS (General Purpose Simulation System) – мова програмування, яка спеціалізується на будуванні
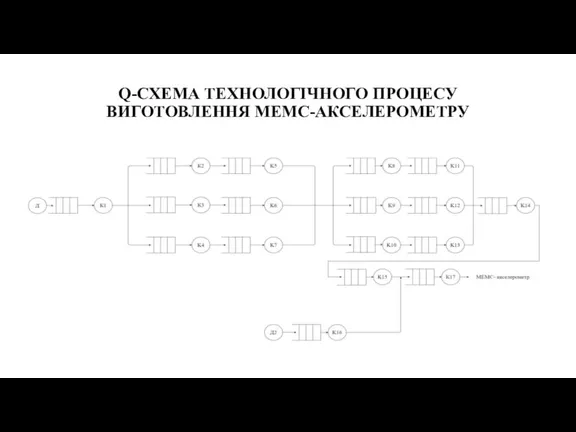
- 8. Q-СХЕМА ТЕХНОЛОГІЧНОГО ПРОЦЕСУ ВИГОТОВЛЕННЯ МЕМС-АКСЕЛЕРОМЕТРУ
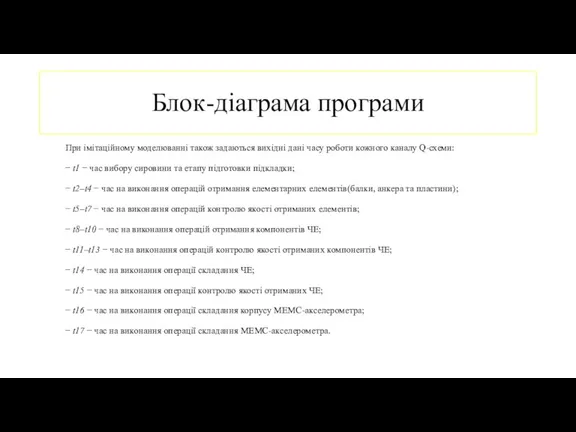
- 9. Блок-діаграма програми При імітаційному моделюванні також задаються вихідні дані часу роботи кожного каналу Q-схеми: − t1
- 10. Код програми імітаційної моделі (3-4 колонки) Якщо відомо час кожної операції, а саме: t1=6 хв.; t2–t4=206±10,223
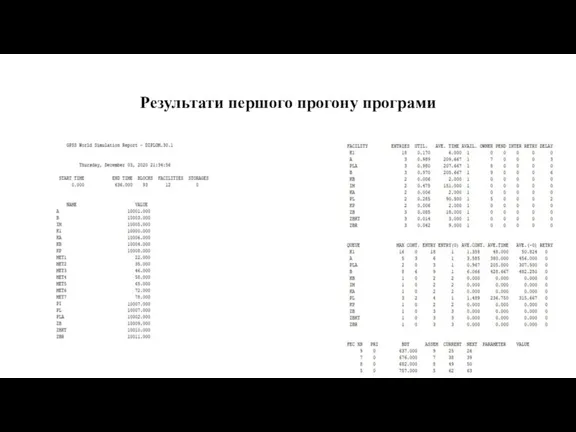
- 11. Результати першого прогону програми
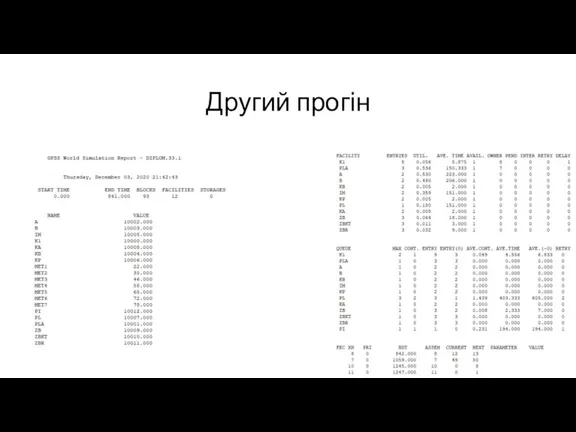
- 12. Другий прогін
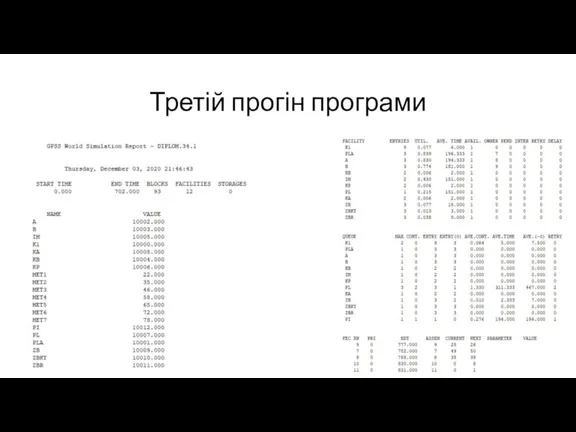
- 13. Третій прогін програми
- 14. ВИСНОВКИ У ході виконання магістерської атестаційної роботи було виконано огляд та аналіз проблеми моделювання роботизованих виробничих
- 16. Скачать презентацию
Слайд 2МЕТА ТА ЗАДАЧІ АТЕСТАЦІЙНОЇ РОБОТИ
Об’єкт дослідження - роботизована виробнича ділянка виготовлення мікроелектромеханічних
МЕТА ТА ЗАДАЧІ АТЕСТАЦІЙНОЇ РОБОТИ
Об’єкт дослідження - роботизована виробнича ділянка виготовлення мікроелектромеханічних
Слайд 3Обладнання роботизованих технологічних комплексів
Токарний роботизований комплекс SL-20APL
Шліфувальний роботизований комплекс
Промисловий робот RV6L «Reis»
Обладнання роботизованих технологічних комплексів
Токарний роботизований комплекс SL-20APL
Шліфувальний роботизований комплекс
Промисловий робот RV6L «Reis»

Слайд 4КЛАСИФІКАЦІЯ ВИДІВ МОДЕЛЮВАННЯ
Моделі поділяються на реальні, які вже на сьогоднішній день не
КЛАСИФІКАЦІЯ ВИДІВ МОДЕЛЮВАННЯ
Моделі поділяються на реальні, які вже на сьогоднішній день не
Слайд 5МЕМС-АКСЕЛЕРОМЕТРИ
МЕМС акселерометри являють собою складовою частиною багатьох автоматизованих систем широкого спектру задач.
МЕМС-АКСЕЛЕРОМЕТРИ
МЕМС акселерометри являють собою складовою частиною багатьох автоматизованих систем широкого спектру задач.
Слайд 6СТРУКТУРА ТЕХНОЛОГІЧНОГО ПРОЦЕСУ ВИГОТОВЛЕННЯ МЕМС-АКСЕЛЕРОМЕТРА
СТРУКТУРА ТЕХНОЛОГІЧНОГО ПРОЦЕСУ ВИГОТОВЛЕННЯ МЕМС-АКСЕЛЕРОМЕТРА
Слайд 7ПАКЕТ ІМІТАЦІЙНОГО МОДЕЛЮВАННЯ GPSSW
GPSS (General Purpose Simulation System) – мова програмування, яка
ПАКЕТ ІМІТАЦІЙНОГО МОДЕЛЮВАННЯ GPSSW
GPSS (General Purpose Simulation System) – мова програмування, яка
Слайд 8Q-СХЕМА ТЕХНОЛОГІЧНОГО ПРОЦЕСУ ВИГОТОВЛЕННЯ МЕМС-АКСЕЛЕРОМЕТРУ
Q-СХЕМА ТЕХНОЛОГІЧНОГО ПРОЦЕСУ ВИГОТОВЛЕННЯ МЕМС-АКСЕЛЕРОМЕТРУ
Слайд 9Блок-діаграма програми
При імітаційному моделюванні також задаються вихідні дані часу роботи кожного каналу
Блок-діаграма програми
При імітаційному моделюванні також задаються вихідні дані часу роботи кожного каналу
Слайд 10Код програми імітаційної моделі (3-4 колонки)
Якщо відомо час кожної операції, а
Код програми імітаційної моделі (3-4 колонки)
Якщо відомо час кожної операції, а

Слайд 11Результати першого прогону програми
Результати першого прогону програми
Слайд 12Другий прогін
Другий прогін
Слайд 13Третій прогін програми
Третій прогін програми
Слайд 14ВИСНОВКИ
У ході виконання магістерської атестаційної роботи було виконано огляд та аналіз проблеми
ВИСНОВКИ
У ході виконання магістерської атестаційної роботи було виконано огляд та аналіз проблеми
 Данные, информация, документы. Лекция №1
Данные, информация, документы. Лекция №1 Построение таблиц истинности
Построение таблиц истинности Современные веб-технологии. Лекция 2.1
Современные веб-технологии. Лекция 2.1 Jobs Guessing Game
Jobs Guessing Game Презентация "Кодирование изображения" - скачать презентации по Информатике
Презентация "Кодирование изображения" - скачать презентации по Информатике Техника безопасности в компьютерном классе
Техника безопасности в компьютерном классе Программа Tinkercad и сервис Circuits. Практическая работа № 2
Программа Tinkercad и сервис Circuits. Практическая работа № 2 Добавление и редактирование текста
Добавление и редактирование текста Транзакции и параллелизм
Транзакции и параллелизм 1_2_1
1_2_1 Администратор баз данных областное автономное учреждение социального обслуживания
Администратор баз данных областное автономное учреждение социального обслуживания Обработка массива целых чисел из файла
Обработка массива целых чисел из файла Oracle Application Express - что это такое?
Oracle Application Express - что это такое? Введение_в_web_программирование
Введение_в_web_программирование Структура информатики
Структура информатики Лекція1_
Лекція1_ Летние онлайн-смены
Летние онлайн-смены Архивация данных
Архивация данных Отчёт за 23.01.17-07.02.17. По плану транзит
Отчёт за 23.01.17-07.02.17. По плану транзит Использование медиапространства в целях повышения мотивации и эффективности воспитательной деятельности
Использование медиапространства в целях повышения мотивации и эффективности воспитательной деятельности Безопасный интернет. Как избежать опасностей?
Безопасный интернет. Как избежать опасностей? Простые и сложные высказывания
Простые и сложные высказывания Типы данных в VBA
Типы данных в VBA Как заполнить Google форму?
Как заполнить Google форму? Доступ к сервису мои достижения
Доступ к сервису мои достижения 1С:Университет ПРОФ. Общая информация о решении
1С:Университет ПРОФ. Общая информация о решении Введение в алгоритмы DM
Введение в алгоритмы DM Образование на основе онлайновых социальных сетей
Образование на основе онлайновых социальных сетей