как объекта управления;
Рассмотрение препятствий и порывов ветра как контролируемых переменных с дальнейшей компенсацией их воздействия корректирующими связями;
Проведение структурно – параметрической оптимизации схемы автоматического управления БПЛА, с принятым квадратичным критерием оптимальности от стабильности (совершенно новый критерий оптимальности);
Проверка полученной системы с ПИД регуляторами отдельно на тангаж, крен и рыскание на робастность показала себя устойчивой даже при рассогласовании параметров объекта управления на +/- 40%;



 Моделирующий алгоритм
Моделирующий алгоритм Моменты, на которые нужно обратить внимание при реализации ДЗ
Моменты, на которые нужно обратить внимание при реализации ДЗ Textes libelles & messages а corriger tunnel. CDE Mikros
Textes libelles & messages а corriger tunnel. CDE Mikros Заместитель (Proxy)
Заместитель (Proxy) Айболит и мартышки. (Занятие 15-16)
Айболит и мартышки. (Занятие 15-16)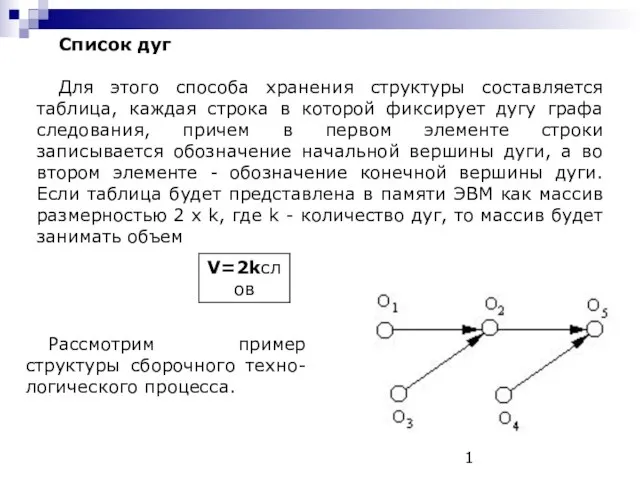 Список дуг
Список дуг В поисках чипсах
В поисках чипсах Программное средство для прохождения тестирования на присвоение квалификационной категории для медицинских работников
Программное средство для прохождения тестирования на присвоение квалификационной категории для медицинских работников Аспекты информационного проектирования одежды с использованием интернет-технологий
Аспекты информационного проектирования одежды с использованием интернет-технологий Анализ предметной области. Диаграмма: сущность - связь
Анализ предметной области. Диаграмма: сущность - связь Файлы и файловая система
Файлы и файловая система Интерфаол технологиялар. Таҳлил қиладиган технологиялар
Интерфаол технологиялар. Таҳлил қиладиган технологиялар Технология разработки программного обеспечения (вторая часть). Структурные шаблоны проектирования ПО
Технология разработки программного обеспечения (вторая часть). Структурные шаблоны проектирования ПО Одномерные массивы. 10 класс
Одномерные массивы. 10 класс Базовые аспекты поиска и устранения неисправностей
Базовые аспекты поиска и устранения неисправностей Предистория информатики. Информационная деятельность
Предистория информатики. Информационная деятельность Профессия моей мамы - программист
Профессия моей мамы - программист Модели знаний на графах
Модели знаний на графах Глагол спит
Глагол спит Информационные технологии в реализации взаимодействия власти и общества современной России
Информационные технологии в реализации взаимодействия власти и общества современной России Моделирование как метод познания моделирование и формализация
Моделирование как метод познания моделирование и формализация Компьютерная сеть
Компьютерная сеть Разработка информационной панели (dashboard) ключевых показателей деятельности органов исполнительной власти субъекта РФ
Разработка информационной панели (dashboard) ключевых показателей деятельности органов исполнительной власти субъекта РФ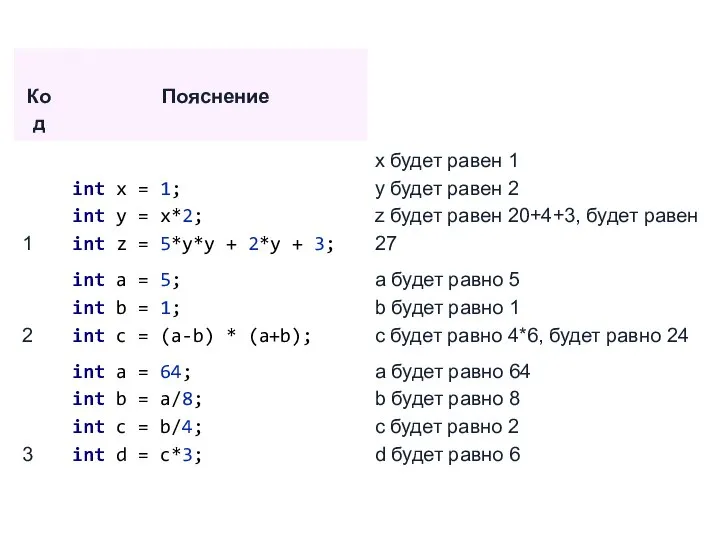 Код. Компилятор
Код. Компилятор Интернет-проект История.ру
Интернет-проект История.ру 2.Вводная лекция
2.Вводная лекция Тест по СУБД
Тест по СУБД Ральф Винтон Лайон Хартли
Ральф Винтон Лайон Хартли