- ПО робоавтомобиля: алгоритмы распознавания и управления

Содержание
- 2. Структура презентации Задачи программного обеспечения беспилотного транспорта Алгоритмы Вопросы-ответы
- 3. Задачи ПО беспилотника Локализация на местности
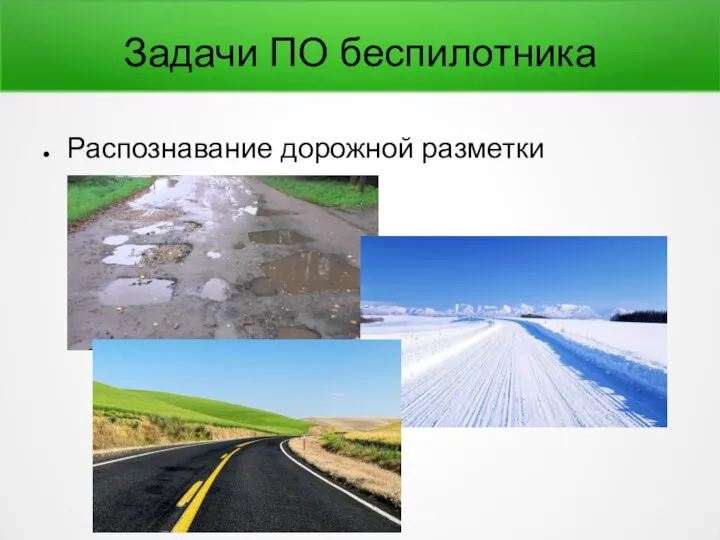
- 4. Задачи ПО беспилотника Распознавание дорожной разметки
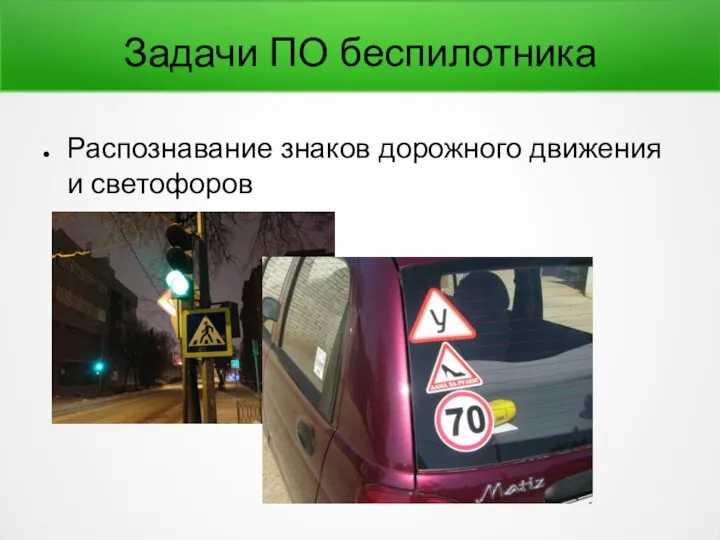
- 5. Задачи ПО беспилотника Распознавание знаков дорожного движения и светофоров
- 6. Задачи ПО беспилотника Распознавание автомобилей, пешеходов, животных и любых других объектов на дороге
- 7. Задачи ПО беспилотника Принятие решений (управление машиной)
- 8. Цели создания модели Обучение основам компьютерного зрения Тестирование алгоритмов в модельных условиях
- 9. Задачи ПО модели беспилотника Распознавание упрощенной разметки Распознавание знаков дорожного движения и светофоров Распознавание других моделей
- 10. Распознавание объектов Структура алгоритмов Получение изображений Предварительная обработка Сегментация Классификация
- 11. Предварительная обработка Уменьшение размерности Перевод в другую цветовую модель Коррекция/Нормализация
- 12. Сегментация Бинаризация
- 13. Сегментация Выделение контуров
- 14. Сегментация Разрастание регионов
- 15. Классификация
- 16. Классификация Сравнение с шаблоном
- 17. Классификация Сравнение (не)инвариантных характеристик
- 18. Глубокие нейронные сети Глубокие нейронные сети
- 19. Принятие решений
- 21. Скачать презентацию
Слайд 2Структура презентации
Задачи программного обеспечения беспилотного транспорта
Алгоритмы
Вопросы-ответы
Структура презентации
Задачи программного обеспечения беспилотного транспорта
Алгоритмы
Вопросы-ответы
Слайд 3Задачи ПО беспилотника
Локализация на местности
Задачи ПО беспилотника
Локализация на местности

Слайд 4Задачи ПО беспилотника
Распознавание дорожной разметки
Задачи ПО беспилотника
Распознавание дорожной разметки
Слайд 5Задачи ПО беспилотника
Распознавание знаков дорожного движения и светофоров
Задачи ПО беспилотника
Распознавание знаков дорожного движения и светофоров
Слайд 6Задачи ПО беспилотника
Распознавание автомобилей, пешеходов, животных и любых других объектов на дороге
Задачи ПО беспилотника
Распознавание автомобилей, пешеходов, животных и любых других объектов на дороге

Слайд 7Задачи ПО беспилотника
Принятие решений (управление машиной)
Задачи ПО беспилотника
Принятие решений (управление машиной)
Слайд 8Цели создания модели
Обучение основам компьютерного зрения
Тестирование алгоритмов в модельных условиях
Цели создания модели
Обучение основам компьютерного зрения
Тестирование алгоритмов в модельных условиях
Слайд 9Задачи ПО модели беспилотника
Распознавание упрощенной разметки
Распознавание знаков дорожного движения и светофоров
Распознавание других
Задачи ПО модели беспилотника
Распознавание упрощенной разметки
Распознавание знаков дорожного движения и светофоров
Распознавание других
Слайд 10Распознавание объектов
Структура алгоритмов
Получение изображений
Предварительная обработка
Сегментация
Классификация
Распознавание объектов
Структура алгоритмов
Получение изображений
Предварительная обработка
Сегментация
Классификация
Слайд 11Предварительная обработка
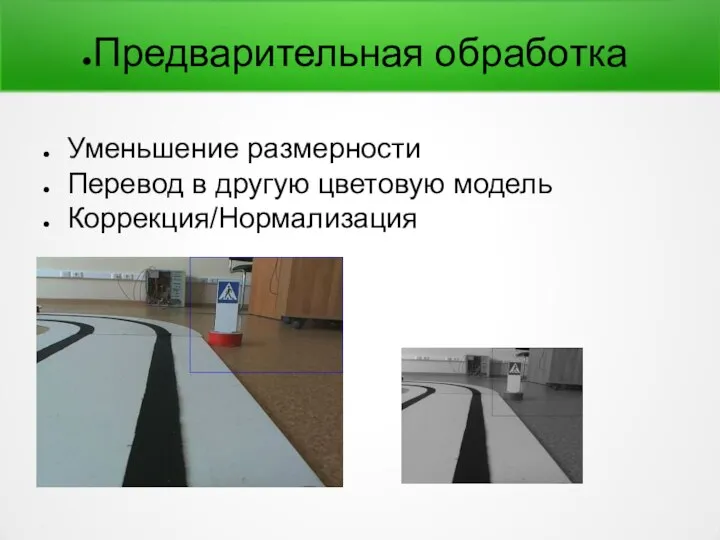
Уменьшение размерности
Перевод в другую цветовую модель
Коррекция/Нормализация
Предварительная обработка
Уменьшение размерности
Перевод в другую цветовую модель
Коррекция/Нормализация
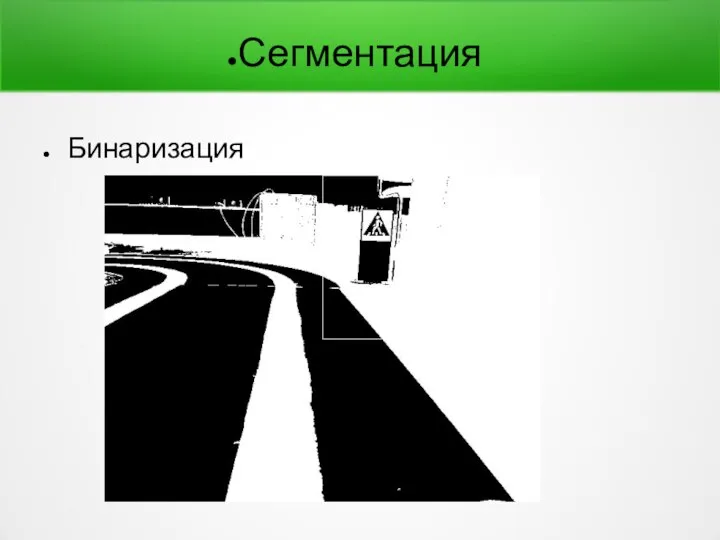
Слайд 12Сегментация
Бинаризация
Сегментация
Бинаризация
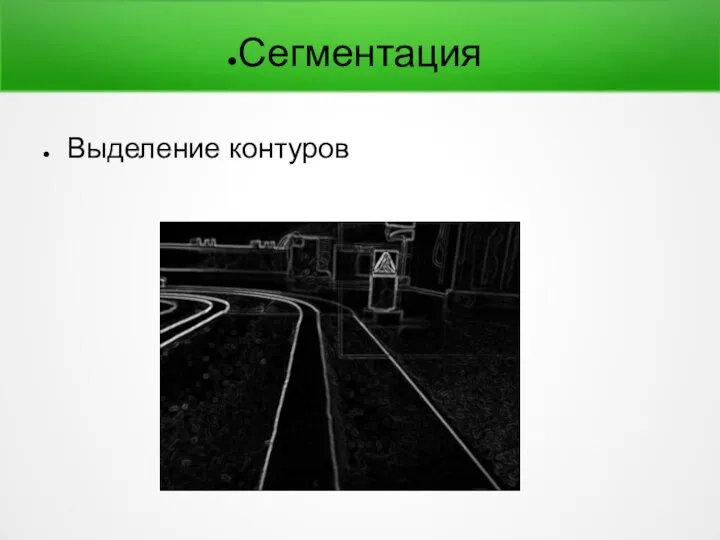
Слайд 13Сегментация
Выделение контуров
Сегментация
Выделение контуров
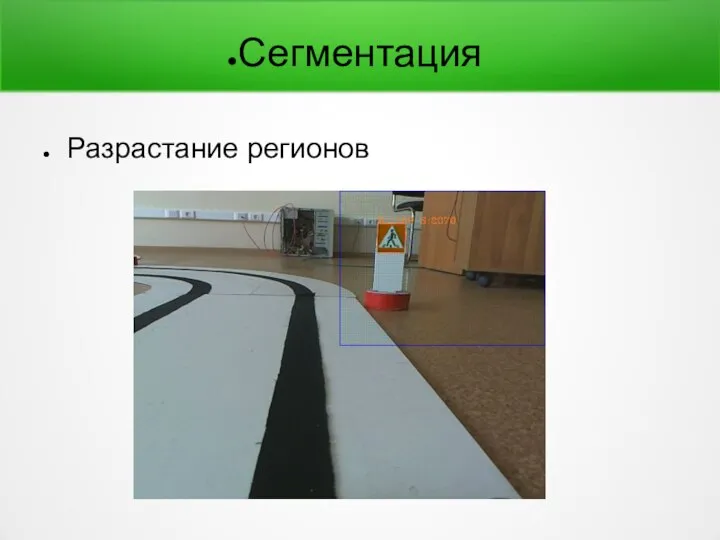
Слайд 14Сегментация
Разрастание регионов
Сегментация
Разрастание регионов
Слайд 15Классификация
Классификация
Слайд 16Классификация
Сравнение с шаблоном
Классификация
Сравнение с шаблоном
Слайд 17Классификация
Сравнение (не)инвариантных характеристик
Классификация
Сравнение (не)инвариантных характеристик
Слайд 18Глубокие нейронные сети
Глубокие нейронные сети
Глубокие нейронные сети
Глубокие нейронные сети
Слайд 19Принятие решений
Принятие решений
 Интернет-источники по географии
Интернет-источники по географии Современные модели качества программных продуктов
Современные модели качества программных продуктов Математическое программное обеспечение автоматизированных систем управления
Математическое программное обеспечение автоматизированных систем управления Презентация на тему Что такое программирование 9 класс
Презентация на тему Что такое программирование 9 класс  Кооперация процессов и основные аспекты её логической организации
Кооперация процессов и основные аспекты её логической организации Программирование на языке Паскаль
Программирование на языке Паскаль Сортировка списков на языке Python
Сортировка списков на языке Python Алгоритмы. Значение алгоритма в информатике
Алгоритмы. Значение алгоритма в информатике Образовательный проект по обучению учащихся 8-11 классов общеобразовательных школ компьютерной бизнес-стимуляции ТИТАН
Образовательный проект по обучению учащихся 8-11 классов общеобразовательных школ компьютерной бизнес-стимуляции ТИТАН Творческие работы и профили в соцсетях
Творческие работы и профили в соцсетях Двоичное кодирование. ( 6 класс)
Двоичное кодирование. ( 6 класс) О состоянии технического оснащения и персонала по поддержке системы
О состоянии технического оснащения и персонала по поддержке системы Службы интернета. Сетевые информационные технологии
Службы интернета. Сетевые информационные технологии Инфографика – это графический способ подачи информации, данных и знаний
Инфографика – это графический способ подачи информации, данных и знаний Одобрение Онлайн по объектам на Витрине ДомКлик
Одобрение Онлайн по объектам на Витрине ДомКлик Путеводитель в 1С ИТС ПРОФ
Путеводитель в 1С ИТС ПРОФ Интерфейс Scratch
Интерфейс Scratch Текстовая информация. Единицы измерения
Текстовая информация. Единицы измерения Строки Python
Строки Python Processing hardware
Processing hardware Разнообразие исполнителей алгоритмов. Основы алгоритмизации
Разнообразие исполнителей алгоритмов. Основы алгоритмизации Дизайн печатного издания и веб-дизайн
Дизайн печатного издания и веб-дизайн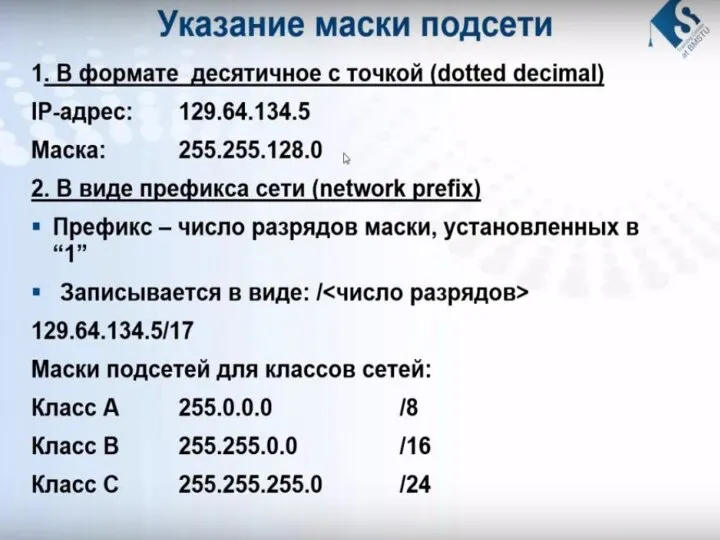 Разделение сети на подсети
Разделение сети на подсети Биналардагы элмә такталар
Биналардагы элмә такталар Выделение и трансформация объектов
Выделение и трансформация объектов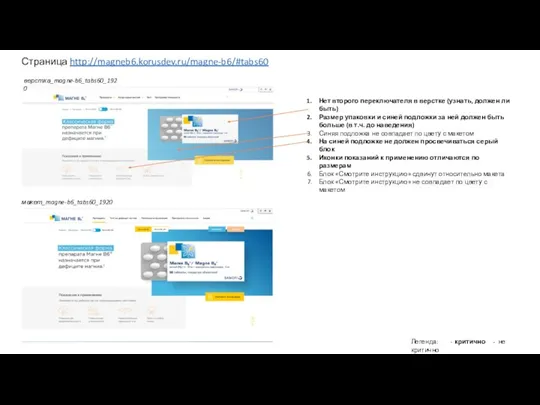 Расхождение верстки
Расхождение верстки Облака и византийские генералы
Облака и византийские генералы Геоинформационные системы в анализе данных
Геоинформационные системы в анализе данных