- Распознавание объектов на изображении на примере игры

Содержание
- 2. Что такое компьютерное зрение? Получение изображений объектов реального мира Обработка этих изображений Использование полученных данных для
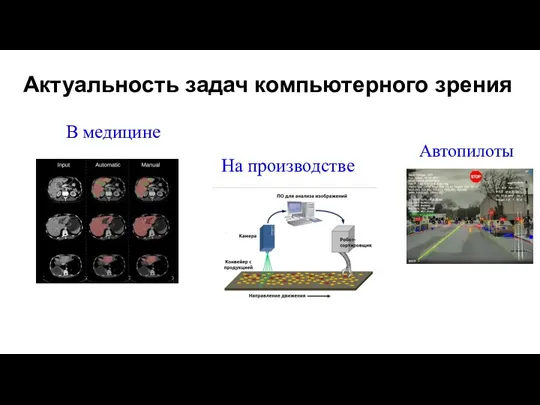
- 3. Актуальность задач компьютерного зрения В медицине На производстве Автопилоты
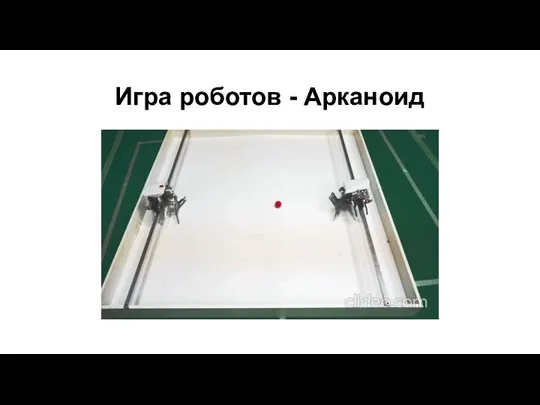
- 4. Игра роботов - Арканоид
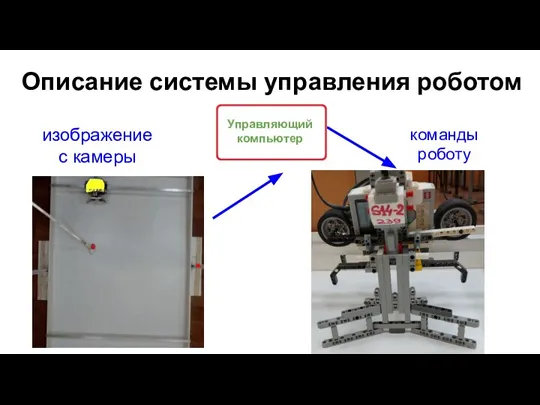
- 5. Описание системы управления роботом изображение с камеры команды роботу Управляющий компьютер
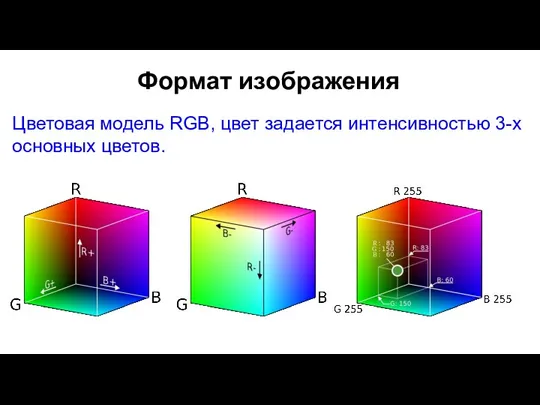
- 6. Формат изображения Цветовая модель RGB, цвет задается интенсивностью 3-х основных цветов.
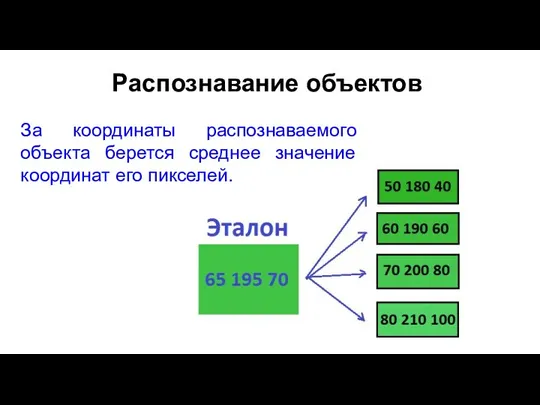
- 7. Распознавание объектов За координаты распознаваемого объекта берется среднее значение координат его пикселей.
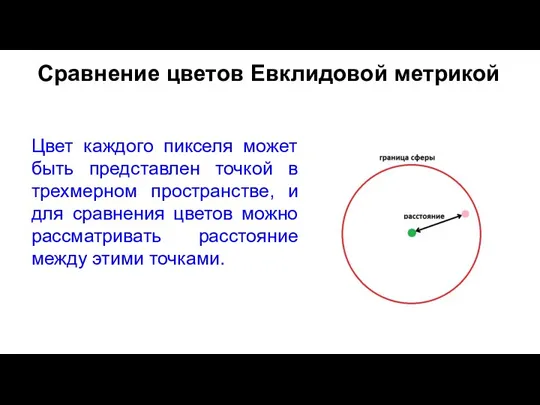
- 8. Сравнение цветов Евклидовой метрикой Цвет каждого пикселя может быть представлен точкой в трехмерном пространстве, и для
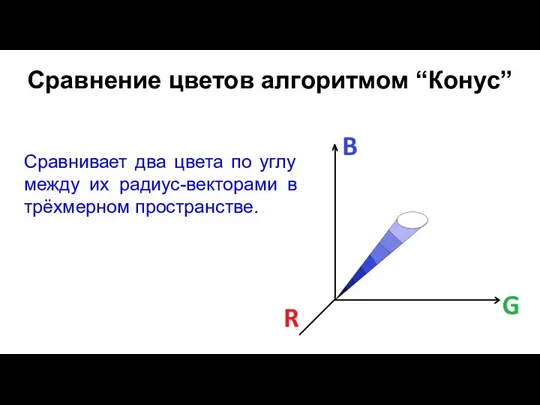
- 9. Сравнение цветов алгоритмом “Конус” Сравнивает два цвета по углу между их радиус-векторами в трёхмерном пространстве.
- 10. Совместное использование Евклидовой метрики и алгоритма “Конус” Существенный минус алгоритма “Конус” : черный и белый цвета
- 11. Методы борьбы с помехами. Отсечки по координатам. Иногда распознаются лишние пиксели, находящиеся не на роботе, если
- 12. Методы борьбы с помехами. Обход в ширину. Обход в ширину позволяет получить размеры компонент связности состоящих
- 13. Реализация движения. П-Регулятор скорости. cкорость = |роботX-мячX|*k+b; Чтобы задать правильную скорость в зависимости от координат мяча
- 14. Реализация удара по мячу Мяч откатился Мяч перед роботом Мяч долго перед роботом
- 16. Скачать презентацию
Слайд 2Что такое компьютерное зрение?
Получение изображений объектов реального мира
Обработка этих изображений
Использование полученных данных
Что такое компьютерное зрение?
Получение изображений объектов реального мира
Обработка этих изображений
Использование полученных данных
Слайд 3Актуальность задач компьютерного зрения
В медицине
На производстве
Автопилоты
Актуальность задач компьютерного зрения
В медицине
На производстве
Автопилоты
Слайд 4Игра роботов - Арканоид
Игра роботов - Арканоид
Слайд 5Описание системы управления роботом
изображение с камеры
команды роботу
Управляющий компьютер
Описание системы управления роботом
изображение с камеры
команды роботу
Управляющий компьютер
Слайд 6Формат изображения
Цветовая модель RGB, цвет задается интенсивностью 3-х основных цветов.
Формат изображения
Цветовая модель RGB, цвет задается интенсивностью 3-х основных цветов.
Слайд 7Распознавание объектов
За координаты распознаваемого объекта берется среднее значение координат его пикселей.
Распознавание объектов
За координаты распознаваемого объекта берется среднее значение координат его пикселей.
Слайд 8Сравнение цветов Евклидовой метрикой
Цвет каждого пикселя может быть представлен точкой в трехмерном
Сравнение цветов Евклидовой метрикой
Цвет каждого пикселя может быть представлен точкой в трехмерном
Слайд 9Сравнение цветов алгоритмом “Конус”
Сравнивает два цвета по углу между их радиус-векторами в
Сравнение цветов алгоритмом “Конус”
Сравнивает два цвета по углу между их радиус-векторами в
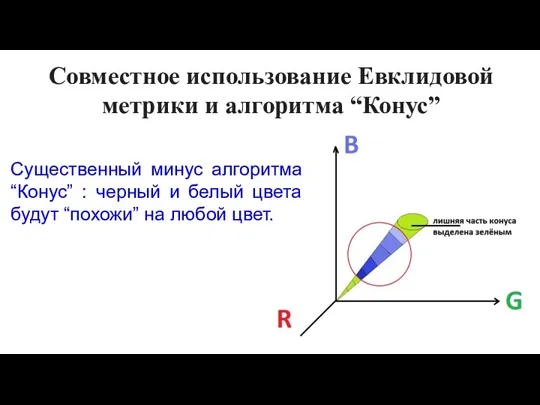
Слайд 10Совместное использование Евклидовой метрики и алгоритма “Конус”
Существенный минус алгоритма “Конус” : черный
Совместное использование Евклидовой метрики и алгоритма “Конус”
Существенный минус алгоритма “Конус” : черный
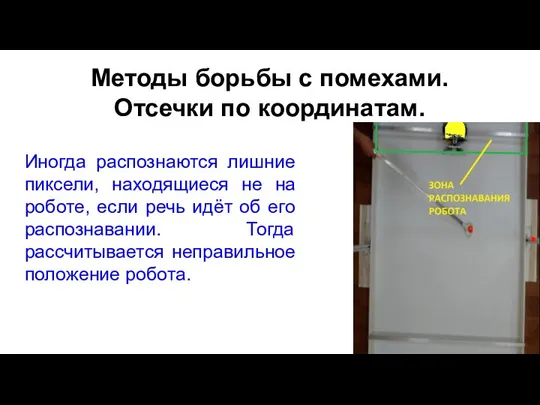
Слайд 11Методы борьбы с помехами.
Отсечки по координатам.
Иногда распознаются лишние пиксели, находящиеся не
Методы борьбы с помехами.
Отсечки по координатам.
Иногда распознаются лишние пиксели, находящиеся не
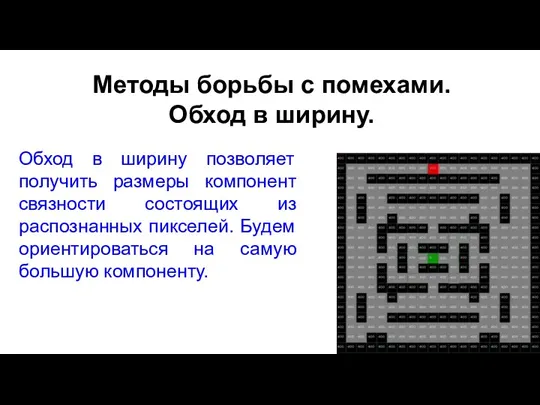
Слайд 12Методы борьбы с помехами.
Обход в ширину.
Обход в ширину позволяет получить размеры
Методы борьбы с помехами.
Обход в ширину.
Обход в ширину позволяет получить размеры
Слайд 13Реализация движения.
П-Регулятор скорости.
cкорость = |роботX-мячX|*k+b;
Чтобы задать правильную скорость в зависимости от
Реализация движения.
П-Регулятор скорости.
cкорость = |роботX-мячX|*k+b;
Чтобы задать правильную скорость в зависимости от
Слайд 14Реализация удара по мячу
Мяч откатился
Мяч перед роботом
Мяч долго перед роботом
Реализация удара по мячу
Мяч откатился
Мяч перед роботом
Мяч долго перед роботом

 Презентация на тему Проекторы
Презентация на тему Проекторы  «Счастливый случай» Тема: Системы счисления и Информационные процессы
«Счастливый случай» Тема: Системы счисления и Информационные процессы Устройство компьютера. 8 класс
Устройство компьютера. 8 класс 1 часть исследования. Инструкция
1 часть исследования. Инструкция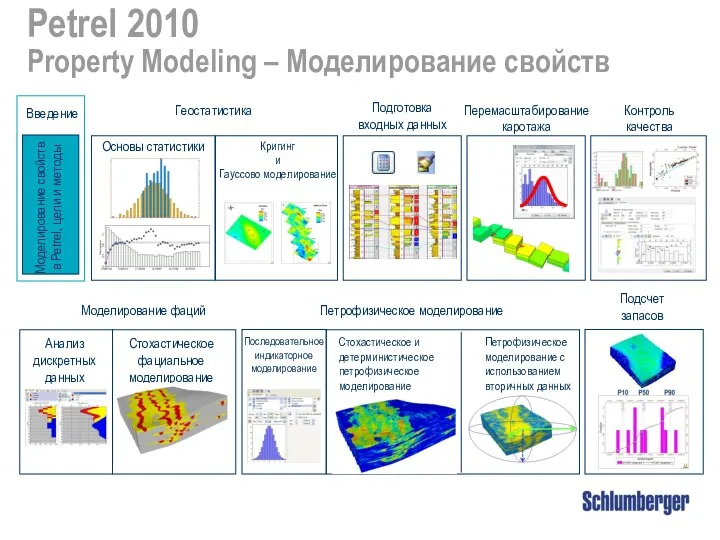 Petrel 2010. Property Modeling – Моделирование свойств
Petrel 2010. Property Modeling – Моделирование свойств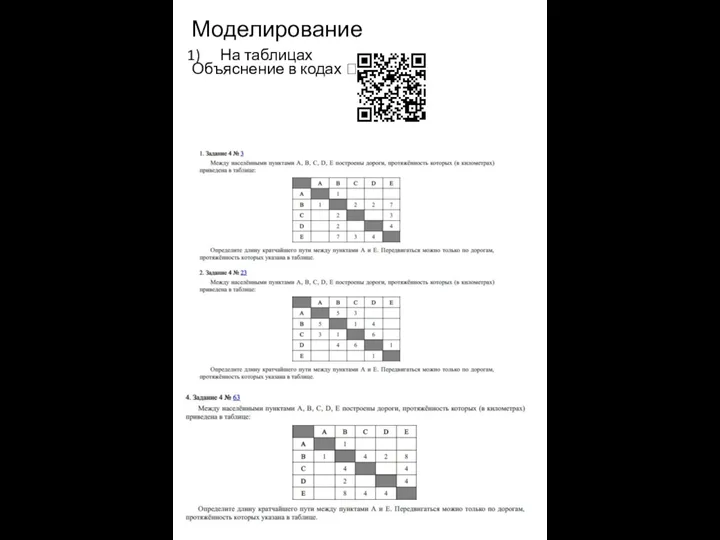 Моделирование. Объяснение в кодах
Моделирование. Объяснение в кодах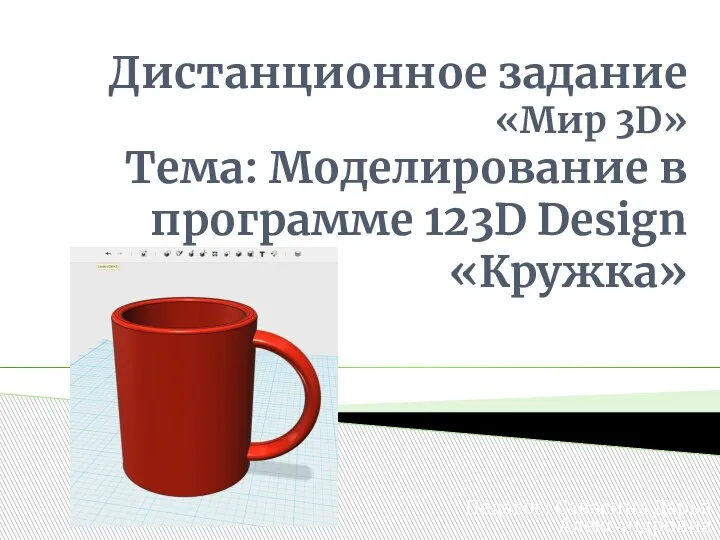 Моделирование в программе 123D Design Куржка
Моделирование в программе 123D Design Куржка Выбор кейса
Выбор кейса Киберспорт в жизни человека
Киберспорт в жизни человека Ruby Dojo
Ruby Dojo Библиотека Requests API
Библиотека Requests API Доступность распространения наркотических средств в сети интернет
Доступность распространения наркотических средств в сети интернет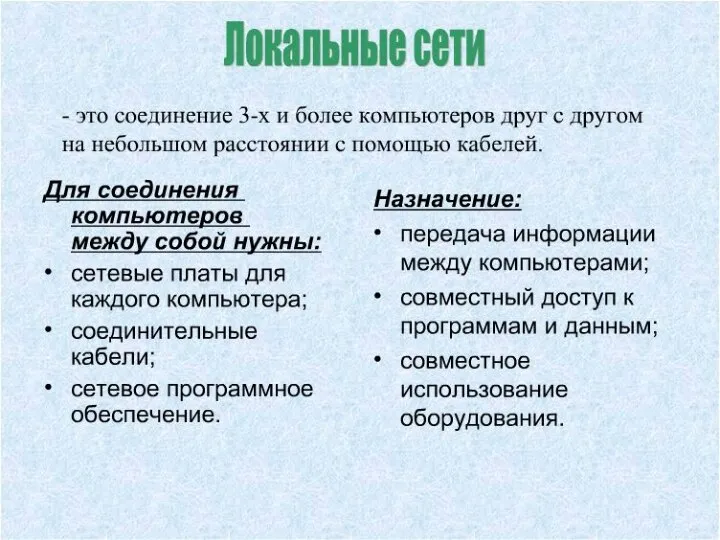 Локаальные сети. Лекция 1
Локаальные сети. Лекция 1 Технологии создания интерактивных тренажеров в программе PowerPoint
Технологии создания интерактивных тренажеров в программе PowerPoint Способы поиска в интернете
Способы поиска в интернете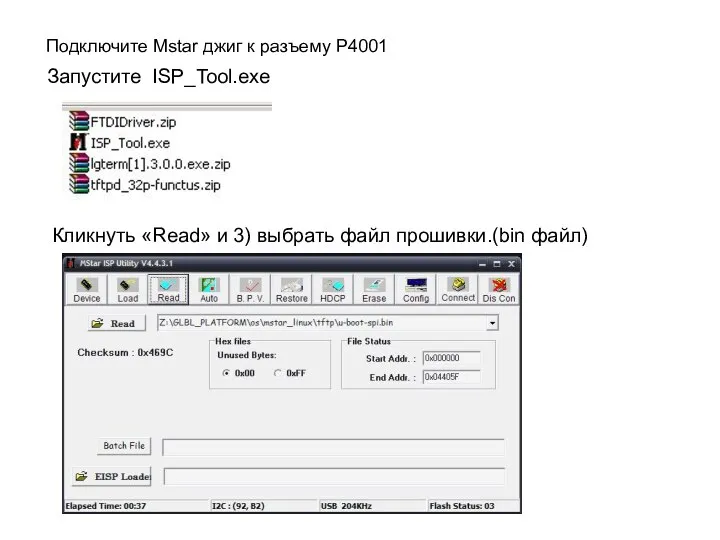 Восстановление плат MSTAR
Восстановление плат MSTAR Моделирование в среде OO Impress
Моделирование в среде OO Impress Линейный алгоритм
Линейный алгоритм База данных
База данных Основы .NET разработки. Операторы повтора. Операторы перехода
Основы .NET разработки. Операторы повтора. Операторы перехода Переменные. Оператор присваивания
Переменные. Оператор присваивания Программа-вымогатель WannaCrypt
Программа-вымогатель WannaCrypt Алгоритмические языки и программирование
Алгоритмические языки и программирование Программное обеспечение Интернет-переписи
Программное обеспечение Интернет-переписи Десятичная система записи натуральных чисел
Десятичная система записи натуральных чисел Создание веб-сайтов. От идеи и дизайн-макета до разработки и верстки. 11-12 лет
Создание веб-сайтов. От идеи и дизайн-макета до разработки и верстки. 11-12 лет Создание сайта
Создание сайта Обработка изображений в системах управления. Методы восстановления изображений. Лекция 7
Обработка изображений в системах управления. Методы восстановления изображений. Лекция 7