- Сервопривод

Содержание
- 2. Сервопривод
- 3. Применение сервоприводов
- 4. Принцип работы
- 5. #include - библиотека для управление сервоприводом Servo Servo1; - переменная Servo с именем Servo1 Servo1.attach(9); -
- 7. #include int servoPin = 9; Servo Servo1; void setup() { Servo1.attach(servoPin); } void loop(){ Servo1.write(0); //
- 8. Задание Написать программу для поворота серво от 0 до 180 градусов и обратно с шагом 5
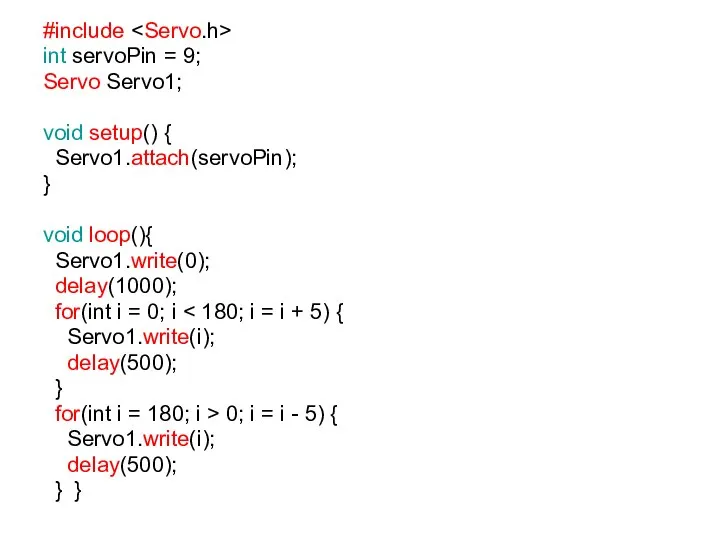
- 9. #include int servoPin = 9; Servo Servo1; void setup() { Servo1.attach(servoPin); } void loop(){ Servo1.write(0); delay(1000);
- 10. Работа с СОМ портом Serial.available() – функция проверки СОМ порта на наличие данных Serial.read(); - функция
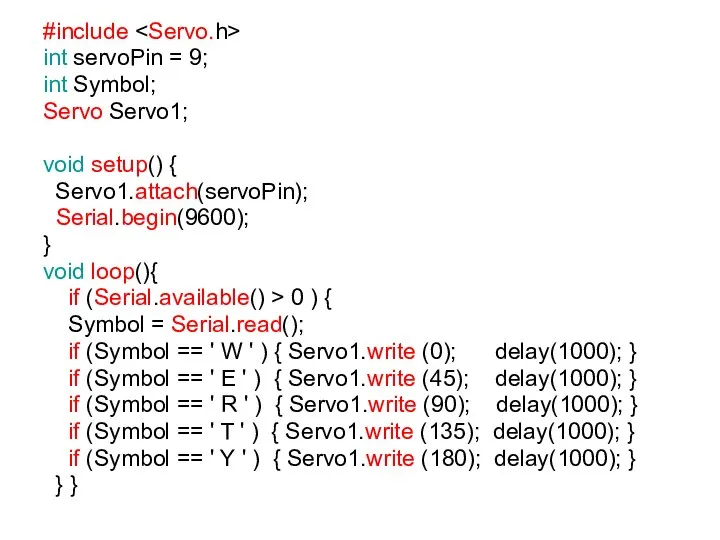
- 11. #include int servoPin = 9; int Symbol; Servo Servo1; void setup() { Servo1.attach(servoPin); Serial.begin(9600); } void
- 13. Скачать презентацию

Слайд 3Применение сервоприводов
Применение сервоприводов

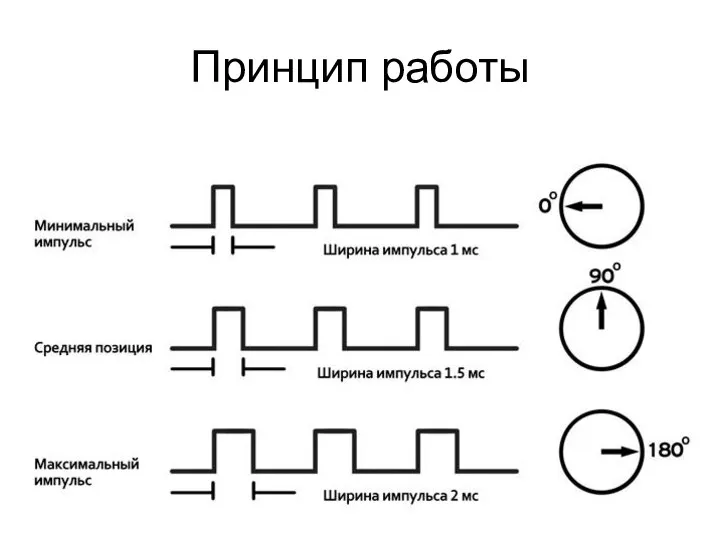
Слайд 4Принцип работы
Принцип работы
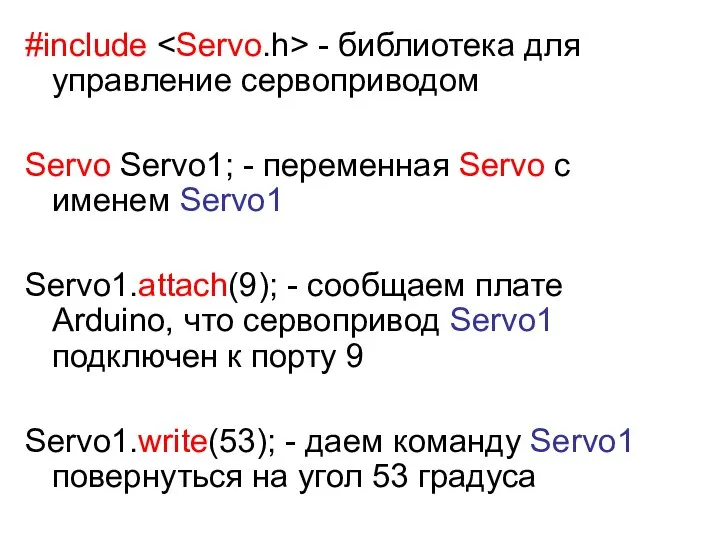
Слайд 5#include - библиотека для управление сервоприводом
Servo Servo1; - переменная Servo с
#include
Servo Servo1; - переменная Servo с
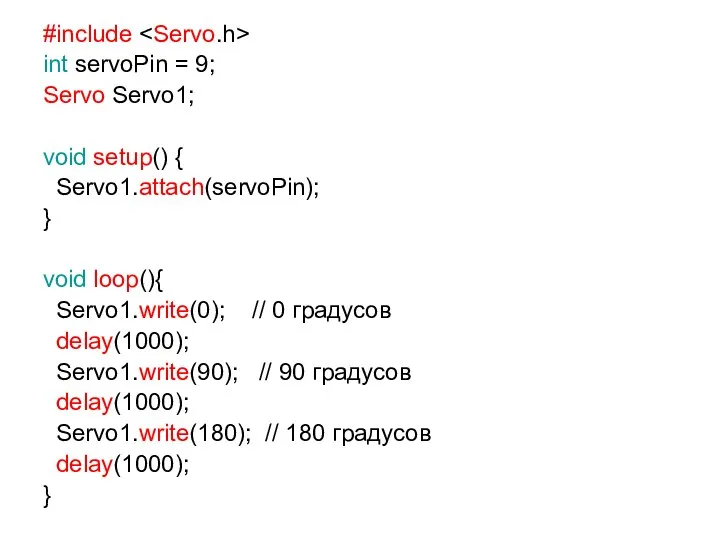
Слайд 7#include
int servoPin = 9;
Servo Servo1;
void setup() {
Servo1.attach(servoPin);
}
void loop(){
Servo1.write(0);
#include
int servoPin = 9;
Servo Servo1;
void setup() {
Servo1.attach(servoPin);
}
void loop(){
Servo1.write(0);
Слайд 8Задание
Написать программу для поворота серво от 0 до 180 градусов и обратно
Задание
Написать программу для поворота серво от 0 до 180 градусов и обратно
Слайд 9#include
int servoPin = 9;
Servo Servo1;
void setup() {
Servo1.attach(servoPin);
}
void loop(){
Servo1.write(0);
#include
int servoPin = 9;
Servo Servo1;
void setup() {
Servo1.attach(servoPin);
}
void loop(){
Servo1.write(0);
Слайд 10Работа с СОМ портом
Serial.available() – функция проверки СОМ порта на наличие данных
Работа с СОМ портом
Serial.available() – функция проверки СОМ порта на наличие данных
Слайд 11#include
int servoPin = 9;
int Symbol;
Servo Servo1;
void setup() {
Servo1.attach(servoPin);
Serial.begin(9600);
}
void
#include
int servoPin = 9;
int Symbol;
Servo Servo1;
void setup() {
Servo1.attach(servoPin);
Serial.begin(9600);
}
void
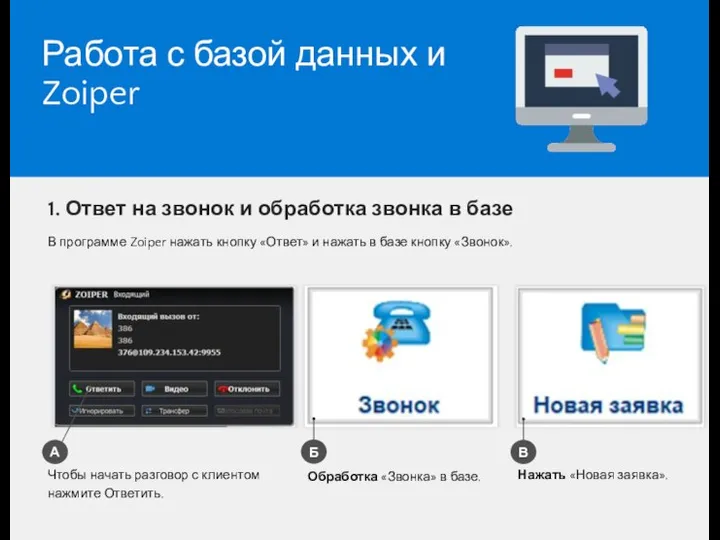 Работа с базой данных и Zoiper
Работа с базой данных и Zoiper Программное обеспечение компьютера
Программное обеспечение компьютера Использование голосового помощника на уроках информатики
Использование голосового помощника на уроках информатики Использование программ в среде ГРИС Стрелочка
Использование программ в среде ГРИС Стрелочка Язык программирования C# (си шарп)
Язык программирования C# (си шарп) Лекция2.1
Лекция2.1 Путешествие по безопасному интернету. Игра
Путешествие по безопасному интернету. Игра Работа с готовой электронной таблицей. Практическая работа №11. 8 класс
Работа с готовой электронной таблицей. Практическая работа №11. 8 класс Smartnet 24: Продвижение товаров и услуг в интернете
Smartnet 24: Продвижение товаров и услуг в интернете Последствия информатизации в политике
Последствия информатизации в политике Операционные системы
Операционные системы Развитие вычислительной техники
Развитие вычислительной техники Квантовые игры и теоретико-игровые основания прагматики
Квантовые игры и теоретико-игровые основания прагматики Самоаудит отделений boxberry через мобильное приложение Checkpoint
Самоаудит отделений boxberry через мобильное приложение Checkpoint Разработка игры на Unreal Engine 4
Разработка игры на Unreal Engine 4 Компьютерные программы
Компьютерные программы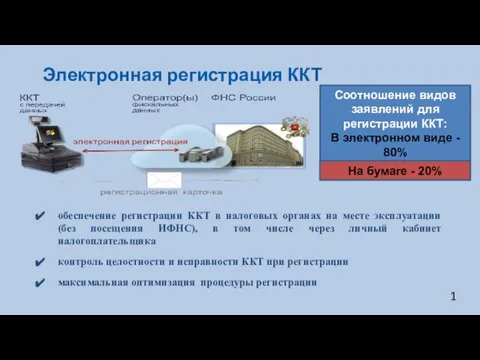 Электронная регистрация ККТ
Электронная регистрация ККТ Постановка целей по SMART
Постановка целей по SMART Информационный процесс
Информационный процесс Текстовая информация
Текстовая информация Аудиовизуальные СМИ Великобритании в период с 1940-ых по 1990-ые гг
Аудиовизуальные СМИ Великобритании в период с 1940-ых по 1990-ые гг Мобильное приложение LevelUpKids
Мобильное приложение LevelUpKids Разбор возможностей торговли между глобальными зонами, с трендовой доливкой
Разбор возможностей торговли между глобальными зонами, с трендовой доливкой Финансово-правовой online Консультант
Финансово-правовой online Консультант Отображение документов нефиксированного формата
Отображение документов нефиксированного формата Преимущества перехода на ЮЗЭДО
Преимущества перехода на ЮЗЭДО Версия
Версия Характеристика MS Access. Объекты MS Access
Характеристика MS Access. Объекты MS Access