- Системы кадровой синхронизации

Содержание
- 2. Кадровая синхронизация → назначение Рассматривается радиосистема передачи данных. Данные организованы в кадры, структура каждого кадра одинакова:
- 3. Кадровая синхронизация → назначение Объем синхроинформации по сравнению со всем объемом передаваемой информации обычно невелик Потеря
- 4. Кадровая синхронизация → особенности Совместно с СТС обеспечивает нормальную работу синхронной цифровой системы приема информации Ошибки
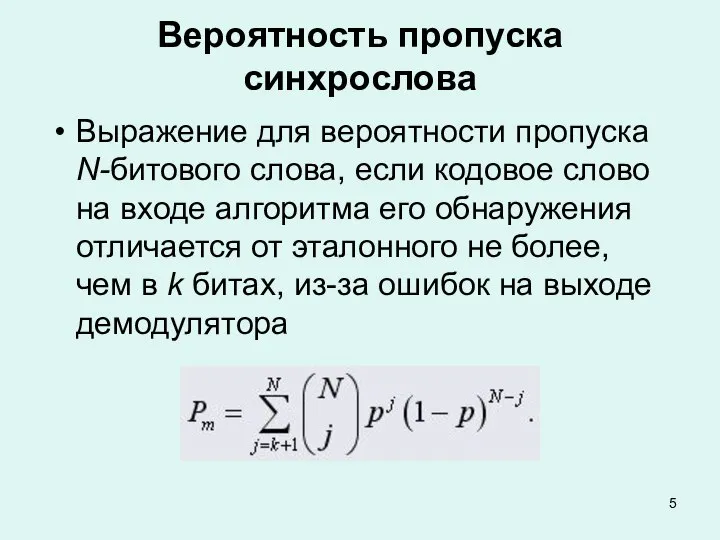
- 5. Вероятность пропуска синхрослова Выражение для вероятности пропуска N-битового слова, если кодовое слово на входе алгоритма его
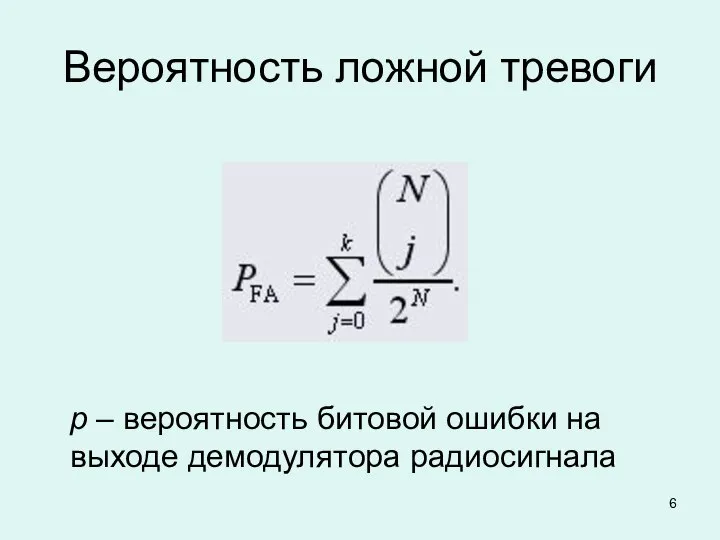
- 6. Вероятность ложной тревоги р – вероятность битовой ошибки на выходе демодулятора радиосигнала
- 7. Вероятности пропуска синхрослова и ложной тревоги При малых р вероятность Рт пропуска синхрослова ↑ (возрастает) с
- 8. При кадровой синхронизации рассматриваются вероятности: пропуска кодового слова его ложного обнаружения Желательно, чтобы обе вероятности были
- 9. Система кадровой синхронизации → характеристики время вхождения в синхронизм (среднее) время удержания синхронизма время обнаружения отсутствия
- 10. Рассматривается цифровая радиосистема передачи данных. Данные организованы в кадры, структура каждого кадра одинакова: синхрослово, блоки информационных
- 11. Выводы 3. Непрерывный режим. В качестве синхрослова можно использовать маркер кадра – короткую последовательность бит или
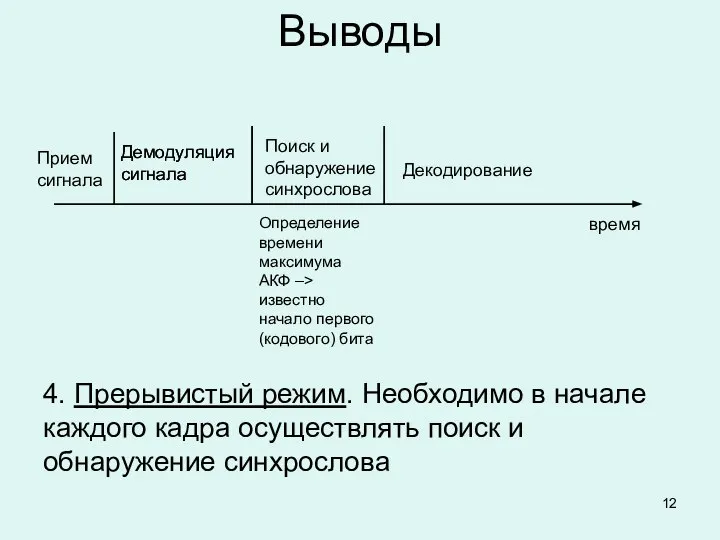
- 12. Выводы 4. Прерывистый режим. Необходимо в начале каждого кадра осуществлять поиск и обнаружение синхрослова Прием сигнала
- 14. Скачать презентацию
Слайд 2Кадровая синхронизация → назначение
Рассматривается радиосистема передачи данных. Данные организованы в кадры,
Кадровая синхронизация → назначение
Рассматривается радиосистема передачи данных. Данные организованы в кадры,
Слайд 3Кадровая синхронизация → назначение
Объем синхроинформации по сравнению со всем объемом передаваемой информации
Кадровая синхронизация → назначение
Объем синхроинформации по сравнению со всем объемом передаваемой информации
Слайд 4Кадровая синхронизация → особенности
Совместно с СТС обеспечивает нормальную работу синхронной цифровой
Кадровая синхронизация → особенности
Совместно с СТС обеспечивает нормальную работу синхронной цифровой
Слайд 5Вероятность пропуска синхрослова
Выражение для вероятности пропуска
N-битового слова, если кодовое слово на
Вероятность пропуска синхрослова
Выражение для вероятности пропуска N-битового слова, если кодовое слово на
Слайд 6Вероятность ложной тревоги
р – вероятность битовой ошибки на выходе демодулятора радиосигнала
Вероятность ложной тревоги
р – вероятность битовой ошибки на выходе демодулятора радиосигнала
Слайд 7Вероятности пропуска синхрослова и ложной тревоги
При малых р вероятность Рт пропуска
Вероятности пропуска синхрослова и ложной тревоги
При малых р вероятность Рт пропуска
Слайд 8При кадровой синхронизации рассматриваются вероятности:
пропуска кодового слова
его ложного обнаружения
Желательно, чтобы обе
При кадровой синхронизации рассматриваются вероятности:
пропуска кодового слова
его ложного обнаружения
Желательно, чтобы обе
Слайд 9Система кадровой синхронизации → характеристики
время вхождения в синхронизм
(среднее) время удержания синхронизма
время обнаружения
Система кадровой синхронизации → характеристики
время вхождения в синхронизм
(среднее) время удержания синхронизма
время обнаружения
Слайд 10 Рассматривается цифровая радиосистема передачи данных. Данные организованы в кадры, структура каждого
Рассматривается цифровая радиосистема передачи данных. Данные организованы в кадры, структура каждого
Слайд 11Выводы
3. Непрерывный режим. В качестве синхрослова можно использовать маркер кадра – короткую
Выводы
3. Непрерывный режим. В качестве синхрослова можно использовать маркер кадра – короткую
Слайд 12Выводы
4. Прерывистый режим. Необходимо в начале каждого кадра осуществлять поиск и
Выводы
4. Прерывистый режим. Необходимо в начале каждого кадра осуществлять поиск и
 Графический редактор Paint. Рисуем Велосипед
Графический редактор Paint. Рисуем Велосипед Арбитраж. День 4
Арбитраж. День 4 Устройства ввода и вывода информации
Устройства ввода и вывода информации Microsoft Office. Краткая характеристика изученных программ
Microsoft Office. Краткая характеристика изученных программ Этапы построения информационной модели
Этапы построения информационной модели Модели объектов и их назначение
Модели объектов и их назначение База данных
База данных Браузеры
Браузеры Рисуем радугу
Рисуем радугу Хранение информации. Память человека и память человечества. Оперативная и долговременная память. Информатика, 5 класс
Хранение информации. Память человека и память человечества. Оперативная и долговременная память. Информатика, 5 класс Телеканал ТНТ
Телеканал ТНТ Выравнивание текста в документе Microsoft Word. Урок 5
Выравнивание текста в документе Microsoft Word. Урок 5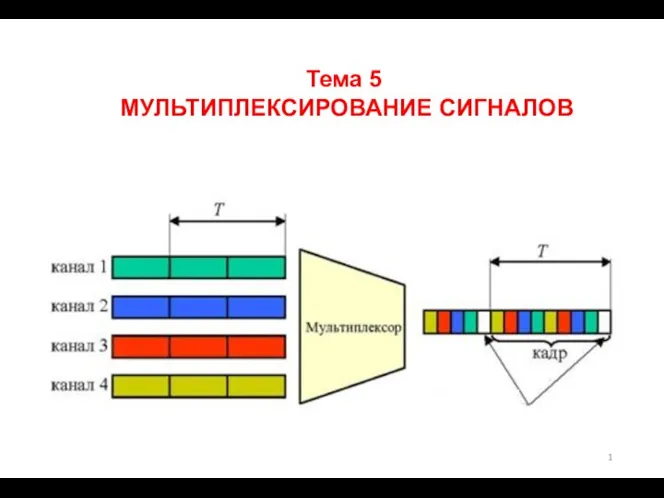 Мультиплексирование сигналов (Тема №5)
Мультиплексирование сигналов (Тема №5) Растровая и векторная графика. Знаки и символы
Растровая и векторная графика. Знаки и символы Lecture03
Lecture03 Новые профессии в Интернете
Новые профессии в Интернете Базы данных: понятие, основные элементы
Базы данных: понятие, основные элементы Измерение информации
Измерение информации Visa application
Visa application Цикл с переменной
Цикл с переменной Работа с массивами и матрицами в языке программирования. ЕГЭ-19
Работа с массивами и матрицами в языке программирования. ЕГЭ-19 Основные термины типографики
Основные термины типографики Бинарная логика. 9-10 лет. Сеть клубов программирования и робототехники. Урок №10
Бинарная логика. 9-10 лет. Сеть клубов программирования и робототехники. Урок №10 Дизайн-супроводження виставкової діяльності
Дизайн-супроводження виставкової діяльності Иерархическая файловая система
Иерархическая файловая система Криптовалюта
Криптовалюта Гиперссылки и ссылки
Гиперссылки и ссылки Linux. Команда cd
Linux. Команда cd