- Технология CUDA

Содержание
- 2. Этапы эволюции графических процессоров (1) ГПУ 1го поколения (середина 90х) – «ответ» на возрастающее потребление вычислительных
- 3. ГПУ 2го поколения (2001-2005). Возможность программирования ГПУ. Изначально фиксированный алгоритм вычисления освещенности и преобразования координат вершин
- 4. ГПУ 3го поколения (c 2005) характеризуются расширенными возможностями программирования. Появляются операции ветвления и циклов, что позволяет
- 5. OpenGLv2.0: поддержка высокоуровневого шейдерного языка GLSL. Производительность ГПУ на реальных задачах достигает сотен Гфлопс. Поддержка целочисленных
- 6. Почему ГПУ ? (1) Почему ОВГПУ активно развивается, хотя программирование ГПУ существенно отличается от традиционного программирования
- 7. Средства программирования ГПУ Шейдерные языки (OpenGL, OpenAL) позволяют лаконично описывать некоторые алгоритмы. Специализированные средства от производителей
- 8. Технология CUDA: зачем? (1) CUDA (Compute Unified Device Architecture) — технология GPGPU (General-Purpose computing on Graphics
- 9. Технология CUDA: зачем? (2) Современные видеочипы содержат сотни математических исполнитель-ных блоков, эта мощь может использоваться для
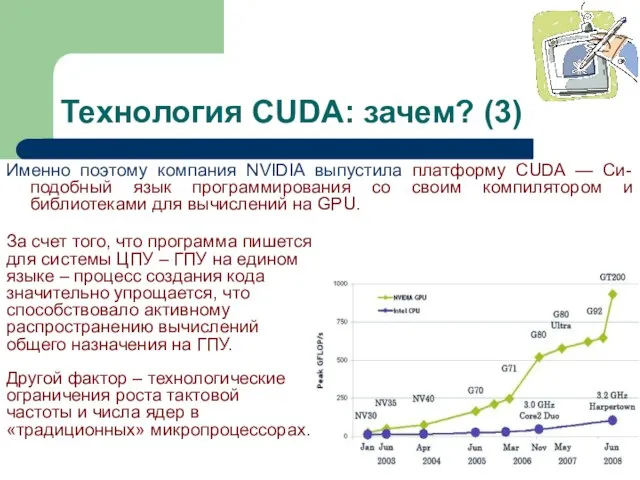
- 10. Технология CUDA: зачем? (3) Именно поэтому компания NVIDIA выпустила платформу CUDA — Cи-подобный язык программирования со
- 11. CUDA: общие положения (1) GPU (device) – сопроцессор для CPU (хоста) У GPU есть собственная память
- 12. CUDA: общие положения (2) Общая схема кода: Выделяется общая память на ГПУ Копируются необходимые данные из
- 13. CUDA: Основы создания программ (1) Первый шаг при переносе существующего приложения на CUDA – определение участков
- 14. CUDA: Основы создания программ (2) Каждый SM состоит из восьми и более ядер — потоковых процессоров,
- 15. CUDA: Модель памяти (1) Модель памяти в CUDA отличается возможностью побайтной адресации, с поддержкой gather и
- 16. CUDA: Модель памяти (2) Память констант: область памяти (64 килобайт), доступная только для чтения всеми МП.
- 17. CUDA: спецификаторы Спецификаторы функций __device__ (выполняется на ГПУ, вызывается из ГПУ) __global__ (выполняется на ГПУ, вызывается
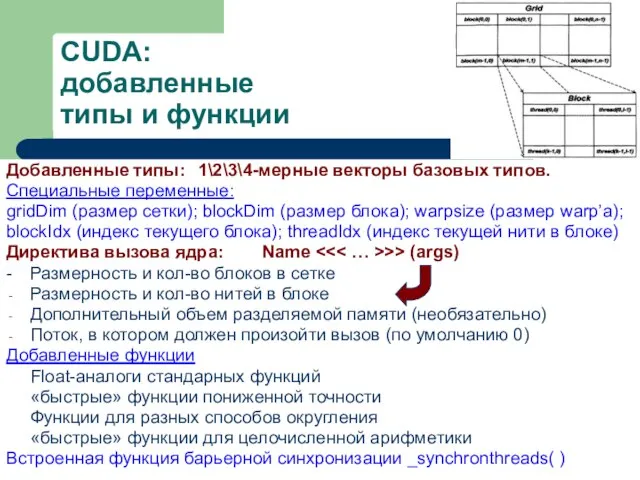
- 18. CUDA: добавленные типы и функции Добавленные типы: 1\2\3\4-мерные векторы базовых типов. Специальные переменные: gridDim (размер сетки);
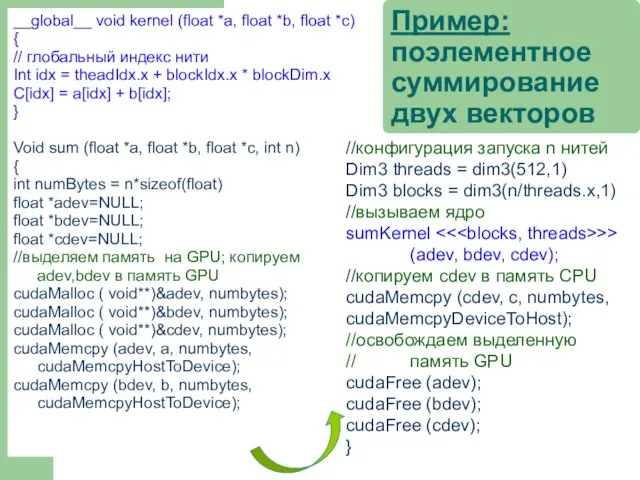
- 19. __global__ void kernel (float *a, float *b, float *c) { // глобальный индекс нити Int idx
- 20. Resumé Cuda строится на концепции, что GPU выступает в роли массивно-параллельного сопроцессора к CPU. Cuda-код задействует
- 22. Скачать презентацию
Слайд 3ГПУ 2го поколения (2001-2005). Возможность программирования ГПУ. Изначально фиксированный алгоритм вычисления освещенности
ГПУ 2го поколения (2001-2005). Возможность программирования ГПУ. Изначально фиксированный алгоритм вычисления освещенности
Слайд 4ГПУ 3го поколения (c 2005) характеризуются расширенными возможностями программирования. Появляются операции ветвления
ГПУ 3го поколения (c 2005) характеризуются расширенными возможностями программирования. Появляются операции ветвления
Слайд 5OpenGLv2.0: поддержка высокоуровневого шейдерного языка GLSL. Производительность ГПУ на реальных задачах достигает
OpenGLv2.0: поддержка высокоуровневого шейдерного языка GLSL. Производительность ГПУ на реальных задачах достигает
Слайд 6Почему ГПУ ? (1)
Почему ОВГПУ активно развивается, хотя программирование ГПУ существенно отличается
Почему ГПУ ? (1)
Почему ОВГПУ активно развивается, хотя программирование ГПУ существенно отличается
Слайд 7Средства программирования ГПУ
Шейдерные языки (OpenGL, OpenAL) позволяют лаконично описывать некоторые алгоритмы.
Специализированные средства
Средства программирования ГПУ
Шейдерные языки (OpenGL, OpenAL) позволяют лаконично описывать некоторые алгоритмы.
Специализированные средства
Слайд 8Технология CUDA: зачем? (1)
CUDA (Compute Unified Device Architecture) — технология GPGPU (General-Purpose computing
Технология CUDA: зачем? (1)
CUDA (Compute Unified Device Architecture) — технология GPGPU (General-Purpose computing
Слайд 9Технология CUDA: зачем? (2)
Современные видеочипы содержат сотни математических исполнитель-ных блоков, эта
Технология CUDA: зачем? (2)
Современные видеочипы содержат сотни математических исполнитель-ных блоков, эта
Слайд 10Технология CUDA: зачем? (3)
Именно поэтому компания NVIDIA выпустила платформу CUDA —
Технология CUDA: зачем? (3)
Именно поэтому компания NVIDIA выпустила платформу CUDA —
Слайд 11CUDA: общие положения (1)
GPU (device) – сопроцессор для CPU (хоста)
У
CUDA: общие положения (1)
GPU (device) – сопроцессор для CPU (хоста)
У
Слайд 12CUDA: общие положения (2)
Общая схема кода:
Выделяется общая память на ГПУ
Копируются необходимые данные
CUDA: общие положения (2)
Общая схема кода:
Выделяется общая память на ГПУ
Копируются необходимые данные
Слайд 13CUDA: Основы создания программ (1)
Первый шаг при переносе существующего приложения на
CUDA: Основы создания программ (1)
Первый шаг при переносе существующего приложения на
Слайд 14CUDA: Основы создания программ (2)
Каждый SM состоит из восьми и более ядер
CUDA: Основы создания программ (2)
Каждый SM состоит из восьми и более ядер
Слайд 15CUDA: Модель памяти (1)
Модель памяти в CUDA отличается возможностью побайтной адресации, с
CUDA: Модель памяти (1)
Модель памяти в CUDA отличается возможностью побайтной адресации, с
Слайд 16CUDA: Модель памяти (2)
Память констант: область памяти (64 килобайт), доступная только для
CUDA: Модель памяти (2)
Память констант: область памяти (64 килобайт), доступная только для
Слайд 17CUDA:
спецификаторы
Спецификаторы функций
__device__ (выполняется на ГПУ, вызывается из ГПУ)
__global__ (выполняется на ГПУ, вызывается
CUDA:
спецификаторы
Спецификаторы функций
__device__ (выполняется на ГПУ, вызывается из ГПУ)
__global__ (выполняется на ГПУ, вызывается
Слайд 18CUDA:
добавленные типы и функции
Добавленные типы: 1\2\3\4-мерные векторы базовых типов.
Специальные переменные:
gridDim (размер сетки);
CUDA:
добавленные типы и функции
Добавленные типы: 1\2\3\4-мерные векторы базовых типов.
Специальные переменные:
gridDim (размер сетки);
Слайд 19__global__ void kernel (float *a, float *b, float *c)
{
// глобальный индекс нити
Int
__global__ void kernel (float *a, float *b, float *c)
{
// глобальный индекс нити
Int
Слайд 20Resumé
Cuda строится на концепции, что GPU выступает в роли массивно-параллельного сопроцессора к
Resumé
Cuda строится на концепции, что GPU выступает в роли массивно-параллельного сопроцессора к
 Login To Your Tomiex Exchange Account
Login To Your Tomiex Exchange Account Педагог - человековед. Виртуальная выставка материалов периодических изданий к 100-летию со дня рождения В.А. Сухомлинского
Педагог - человековед. Виртуальная выставка материалов периодических изданий к 100-летию со дня рождения В.А. Сухомлинского Практическая работа №6. Создание таблиц и графиков в программе в PowerPoint
Практическая работа №6. Создание таблиц и графиков в программе в PowerPoint Ресурсы операционной системы
Ресурсы операционной системы Влияние информационной революции на Ж/Д отрасль
Влияние информационной революции на Ж/Д отрасль Информационная безопасность в современном интернете
Информационная безопасность в современном интернете Культура интеллектуального труда
Культура интеллектуального труда b8150e7b24b16fd97f0a513a2a35e380
b8150e7b24b16fd97f0a513a2a35e380 Лабораторная работа по компьютерной графике в графическом редакторе Gimp. Осенний коллаж
Лабораторная работа по компьютерной графике в графическом редакторе Gimp. Осенний коллаж Информационные таможенные технологии
Информационные таможенные технологии История развития математической логики
История развития математической логики Установка и настройка серверов DNS, WINS, DHCP
Установка и настройка серверов DNS, WINS, DHCP Информация, ее виды и свойства. Информационные процессы
Информация, ее виды и свойства. Информационные процессы 2_6_pamyat
2_6_pamyat Кодирование графической информации
Кодирование графической информации Коммуникативные характеристики интернета
Коммуникативные характеристики интернета Основные правила записи формул Виды формул
Основные правила записи формул Виды формул Принципы целеполагания в системах ситуационного анализа
Принципы целеполагания в системах ситуационного анализа WindowsForm_v_C
WindowsForm_v_C Оценка рынка программных продуктов в сфере медицинских информационных систем Workspace Manager
Оценка рынка программных продуктов в сфере медицинских информационных систем Workspace Manager Полиморфизм
Полиморфизм Профессия гейм-дизайнер
Профессия гейм-дизайнер Итоги лиги 1С: ИТС
Итоги лиги 1С: ИТС Создание слайдов с триггерами
Создание слайдов с триггерами Понятие информации
Понятие информации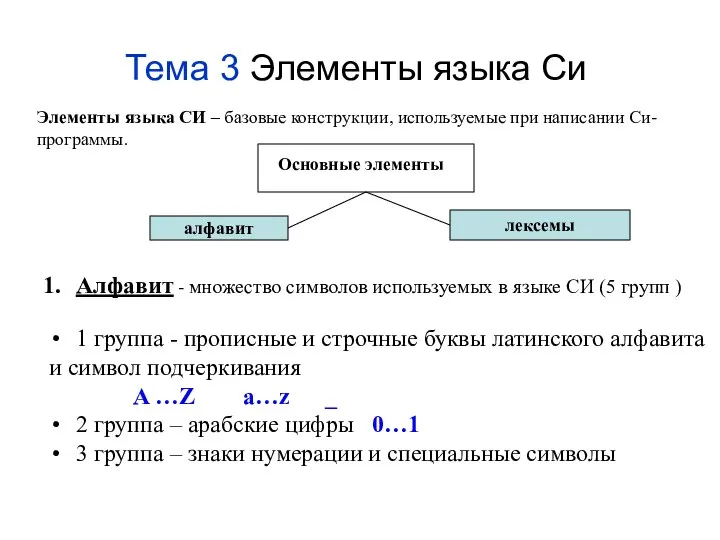 Элементы языка Си
Элементы языка Си Обеспечение клиента достоверной информацией и эффективной бесперебойной работой онлайн платформы
Обеспечение клиента достоверной информацией и эффективной бесперебойной работой онлайн платформы Информационно-технологическая архитектура ИС
Информационно-технологическая архитектура ИС