- Точки и вектора. Геометрия

Содержание
- 2. Точки и вектора Любую геометрическую задачу можно решить оперируя только точками и векторами. Отрезок можно представить
- 3. Реализация вектора 1 Создадим структуру Vector. Сделаем её шаблонной так, как некоторые задачи решаются в целых
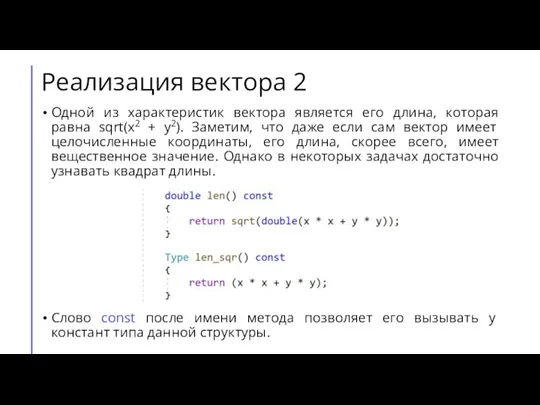
- 4. Реализация вектора 2 Одной из характеристик вектора является его длина, которая равна sqrt(x2 + y2). Заметим,
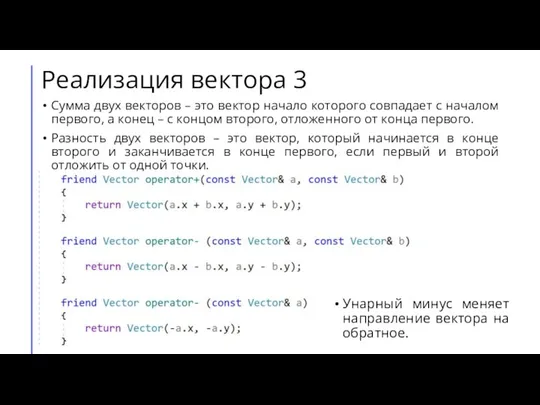
- 5. Реализация вектора 3 Сумма двух векторов – это вектор начало которого совпадает с началом первого, а
- 6. Реализация вектора 4 Скалярное произведение векторов a и b – это число, равное произведению длин этих
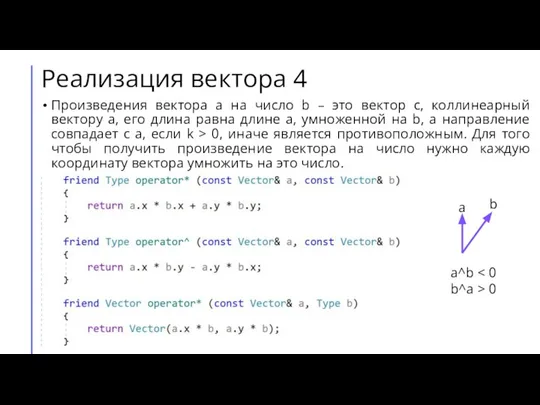
- 7. Реализация вектора 4 Произведения вектора a на число b – это вектор с, коллинеарный вектору а,
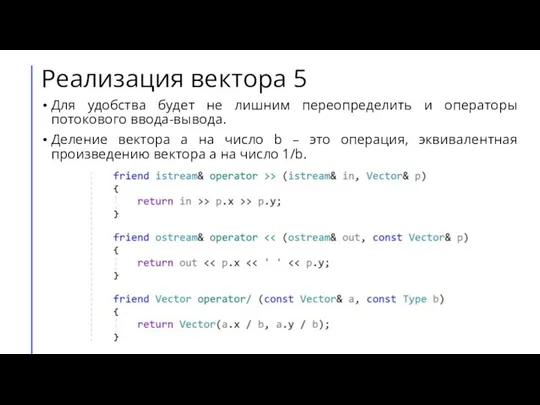
- 8. Реализация вектора 5 Для удобства будет не лишним переопределить и операторы потокового ввода-вывода. Деление вектора a
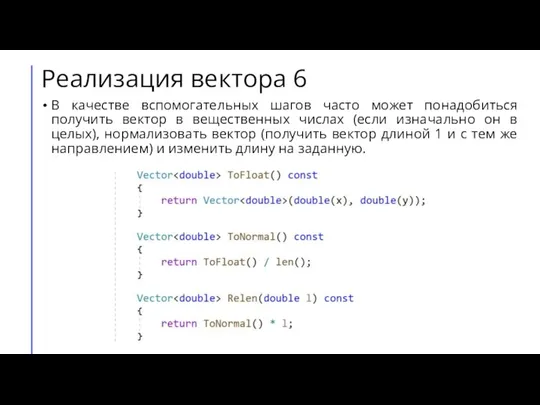
- 9. Реализация вектора 6 В качестве вспомогательных шагов часто может понадобиться получить вектор в вещественных числах (если
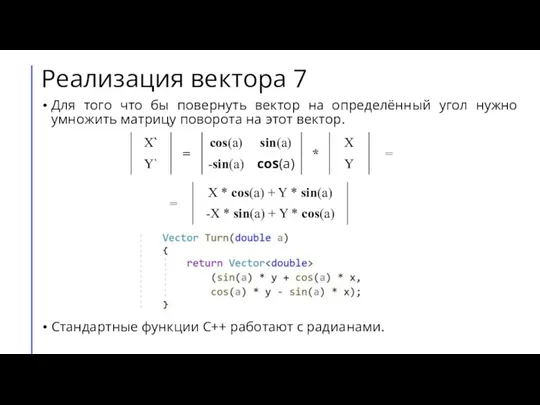
- 10. Реализация вектора 7 Для того что бы повернуть вектор на определённый угол нужно умножить матрицу поворота
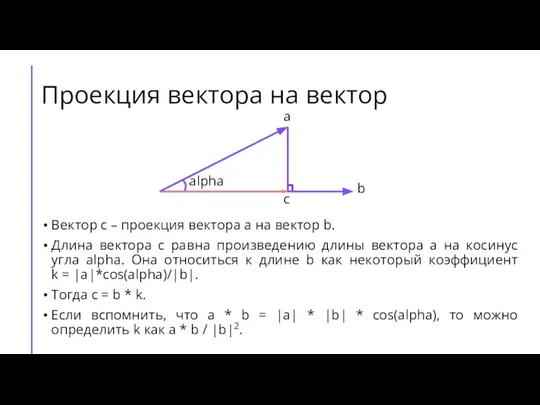
- 11. Проекция вектора на вектор a b c alpha Вектор с – проекция вектора а на вектор
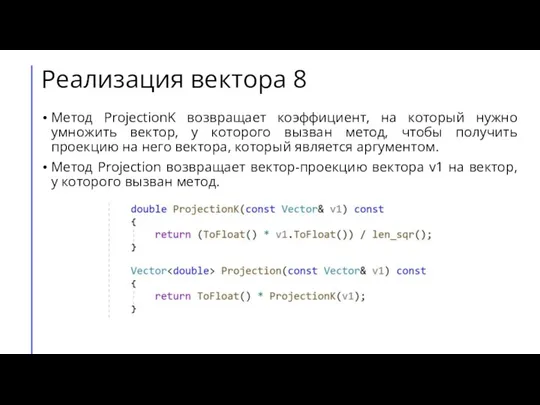
- 12. Реализация вектора 8 Метод ProjectionK возвращает коэффициент, на который нужно умножить вектор, у которого вызван метод,
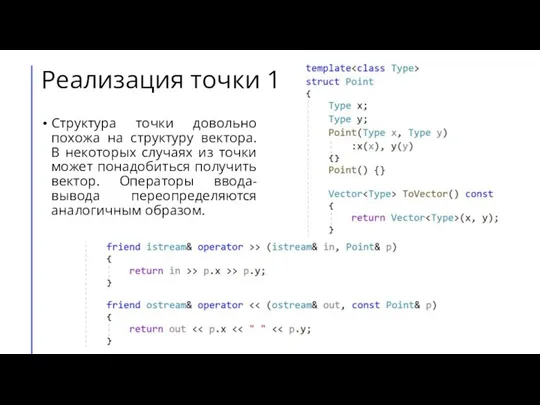
- 13. Реализация точки 1 Структура точки довольно похожа на структуру вектора. В некоторых случаях из точки может
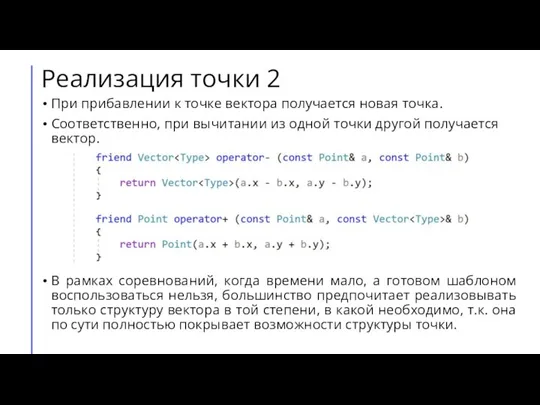
- 14. При прибавлении к точке вектора получается новая точка. Соответственно, при вычитании из одной точки другой получается
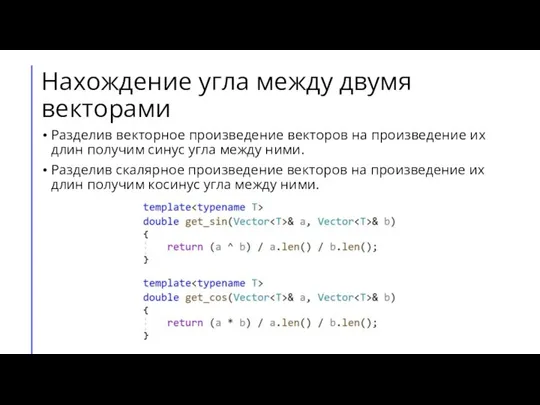
- 15. Нахождение угла между двумя векторами Разделив векторное произведение векторов на произведение их длин получим синус угла
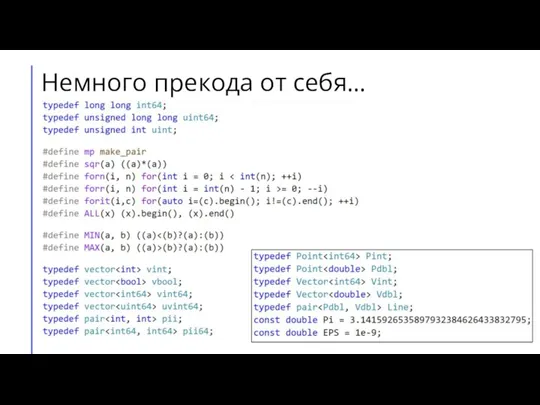
- 16. Немного прекода от себя…
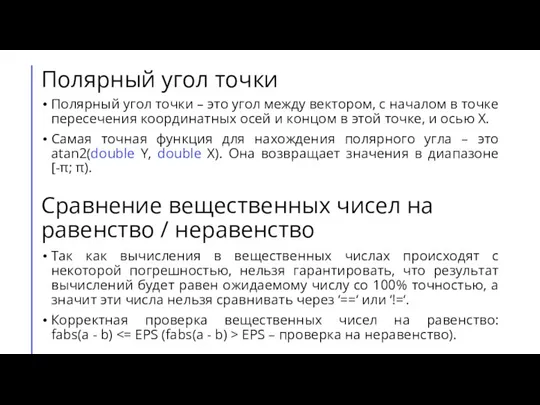
- 17. Полярный угол точки Полярный угол точки – это угол между вектором, с началом в точке пересечения
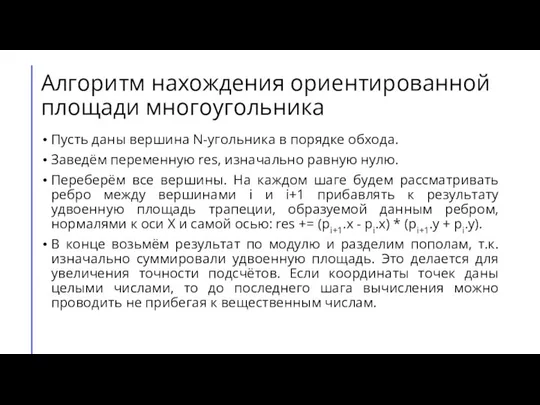
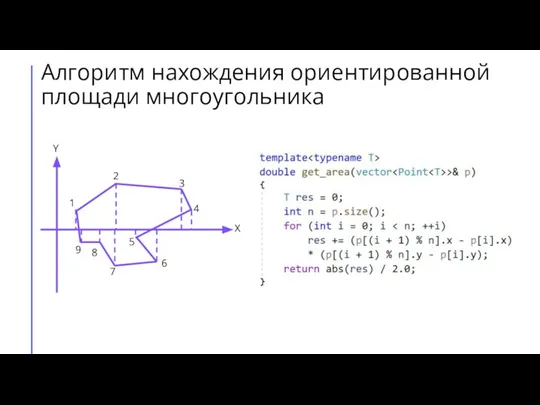
- 18. Алгоритм нахождения ориентированной площади многоугольника Пусть даны вершина N-угольника в порядке обхода. Заведём переменную res, изначально
- 19. Алгоритм нахождения ориентированной площади многоугольника Y X 1 2 3 4 5 6 7 8 9
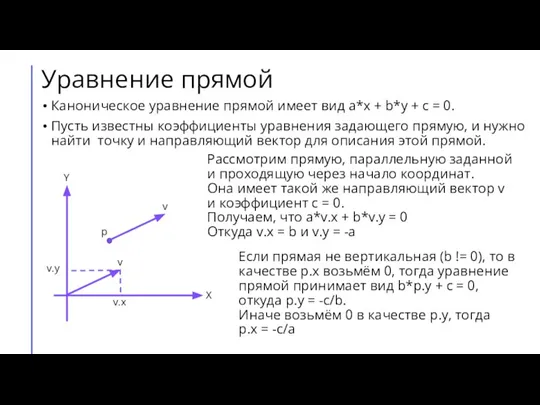
- 20. Уравнение прямой Каноническое уравнение прямой имеет вид a*x + b*y + c = 0. Пусть известны
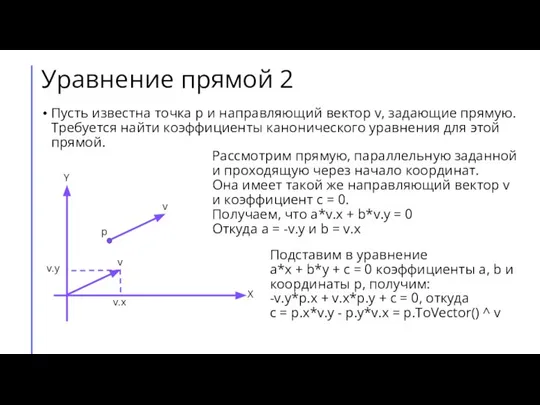
- 21. Уравнение прямой 2 Пусть известна точка p и направляющий вектор v, задающие прямую. Требуется найти коэффициенты
- 23. Скачать презентацию
Слайд 2Точки и вектора
Любую геометрическую задачу можно решить оперируя только точками и векторами.
Отрезок
Точки и вектора
Любую геометрическую задачу можно решить оперируя только точками и векторами.
Отрезок
Слайд 3Реализация вектора 1
Создадим структуру Vector. Сделаем её шаблонной так, как некоторые задачи
Реализация вектора 1
Создадим структуру Vector. Сделаем её шаблонной так, как некоторые задачи

Слайд 4Реализация вектора 2
Одной из характеристик вектора является его длина, которая равна sqrt(x2
Реализация вектора 2
Одной из характеристик вектора является его длина, которая равна sqrt(x2
Слайд 5Реализация вектора 3
Сумма двух векторов – это вектор начало которого совпадает с
Реализация вектора 3
Сумма двух векторов – это вектор начало которого совпадает с
Слайд 6Реализация вектора 4
Скалярное произведение векторов a и b – это число, равное
Реализация вектора 4
Скалярное произведение векторов a и b – это число, равное
Слайд 7Реализация вектора 4
Произведения вектора a на число b – это вектор с,
Реализация вектора 4
Произведения вектора a на число b – это вектор с,
Слайд 8Реализация вектора 5
Для удобства будет не лишним переопределить и операторы потокового ввода-вывода.
Деление
Реализация вектора 5
Для удобства будет не лишним переопределить и операторы потокового ввода-вывода.
Деление
Слайд 9Реализация вектора 6
В качестве вспомогательных шагов часто может понадобиться получить вектор в
Реализация вектора 6
В качестве вспомогательных шагов часто может понадобиться получить вектор в
Слайд 10Реализация вектора 7
Для того что бы повернуть вектор на определённый угол нужно
Реализация вектора 7
Для того что бы повернуть вектор на определённый угол нужно
Слайд 11Проекция вектора на вектор
a
b
c
alpha
Вектор с – проекция вектора а на вектор b.
Длина
Проекция вектора на вектор
a
b
c
alpha
Вектор с – проекция вектора а на вектор b.
Длина
Слайд 12Реализация вектора 8
Метод ProjectionK возвращает коэффициент, на который нужно умножить вектор, у
Реализация вектора 8
Метод ProjectionK возвращает коэффициент, на который нужно умножить вектор, у
Слайд 13Реализация точки 1
Структура точки довольно похожа на структуру вектора. В некоторых случаях
Реализация точки 1
Структура точки довольно похожа на структуру вектора. В некоторых случаях
Слайд 14При прибавлении к точке вектора получается новая точка.
Соответственно, при вычитании из одной
При прибавлении к точке вектора получается новая точка.
Соответственно, при вычитании из одной
Слайд 15Нахождение угла между двумя векторами
Разделив векторное произведение векторов на произведение их длин
Нахождение угла между двумя векторами
Разделив векторное произведение векторов на произведение их длин
Слайд 16Немного прекода от себя…
Немного прекода от себя…
Слайд 17Полярный угол точки
Полярный угол точки – это угол между вектором, с началом
Полярный угол точки
Полярный угол точки – это угол между вектором, с началом
Слайд 18Алгоритм нахождения ориентированной площади многоугольника
Пусть даны вершина N-угольника в порядке обхода.
Заведём переменную
Алгоритм нахождения ориентированной площади многоугольника
Пусть даны вершина N-угольника в порядке обхода.
Заведём переменную
Слайд 19Алгоритм нахождения ориентированной площади многоугольника
Y
X
1
2
3
4
5
6
7
8
9
Алгоритм нахождения ориентированной площади многоугольника
Y
X
1
2
3
4
5
6
7
8
9
Слайд 20Уравнение прямой
Каноническое уравнение прямой имеет вид a*x + b*y + c =
Уравнение прямой
Каноническое уравнение прямой имеет вид a*x + b*y + c =
Слайд 21Уравнение прямой 2
Пусть известна точка p и направляющий вектор v, задающие прямую.
Уравнение прямой 2
Пусть известна точка p и направляющий вектор v, задающие прямую.
 Система сертификации средств защиты информации
Система сертификации средств защиты информации Программное обеспечение внешних подключаемых устройств
Программное обеспечение внешних подключаемых устройств Создание рисунков средствами MS Office Powerpoint
Создание рисунков средствами MS Office Powerpoint Стандартные функции ввода-вывода
Стандартные функции ввода-вывода Алгоритмы и исполнители (8 класс)
Алгоритмы и исполнители (8 класс) Итерационные алгоритмы и программы. Лекция 7
Итерационные алгоритмы и программы. Лекция 7 Статистика. Обработка и представление результатов исследования с помощью MS Excel
Статистика. Обработка и представление результатов исследования с помощью MS Excel Пэкмен. Обзор на Скайрим
Пэкмен. Обзор на Скайрим История развития отечественной вычислительной техники
История развития отечественной вычислительной техники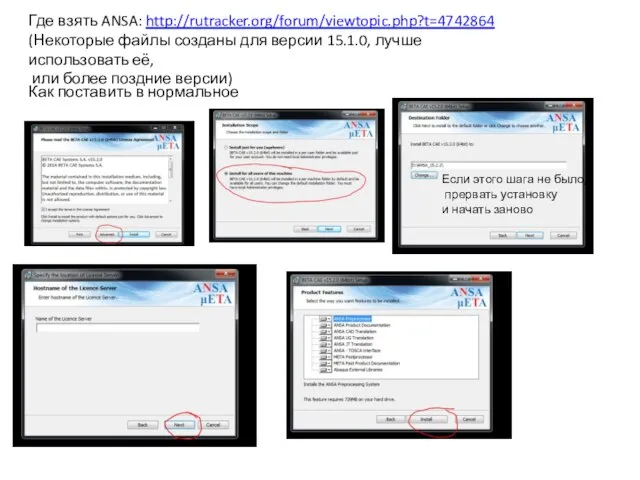 BETA CAE Systems (ANSA + Meta Post + CAD Translator) v15.1.0 Win64 [2014, ENG]
BETA CAE Systems (ANSA + Meta Post + CAD Translator) v15.1.0 Win64 [2014, ENG] Системы счисления. Логика и алгоритмы. Высказывания, логические операции, кванторы, истинность высказывания
Системы счисления. Логика и алгоритмы. Высказывания, логические операции, кванторы, истинность высказывания Электронные таблицы. Обработка числовой информации в электронных таблицах
Электронные таблицы. Обработка числовой информации в электронных таблицах Моделирование функциональных и вычислительных задач
Моделирование функциональных и вычислительных задач Устранение цифрового неравенства в Матвеевском районе
Устранение цифрового неравенства в Матвеевском районе Санс и Папайрус (Папирус) в виде пони
Санс и Папайрус (Папирус) в виде пони Линейные блочные коды. Коды Хэмминга
Линейные блочные коды. Коды Хэмминга Материалы курса Система автоматического программирования. Основные принципы & Подводные камни
Материалы курса Система автоматического программирования. Основные принципы & Подводные камни 9-1-4
9-1-4 Информационная система ателье
Информационная система ателье Работа с графическими объектами в Microsoft Word
Работа с графическими объектами в Microsoft Word Информатика. Вводная лекция
Информатика. Вводная лекция Приложение к положению о конкурсе фоторабот Сибстрин в лицах
Приложение к положению о конкурсе фоторабот Сибстрин в лицах Группа Слава ВГУИТУ
Группа Слава ВГУИТУ Электронды үкімет
Электронды үкімет Условные конструкции
Условные конструкции Автоматизация поиска оптимального уровня бинаризации синтезированных голограмм-проекторов Френеля
Автоматизация поиска оптимального уровня бинаризации синтезированных голограмм-проекторов Френеля Триггеры в презентации. Применение. Создание слайдов с триггерами
Триггеры в презентации. Применение. Создание слайдов с триггерами Кибербуллинг
Кибербуллинг