- Трансляции, их представление и реализация

Содержание
- 2. § 1.1. Трансляции и трансляторы Определение 1.1. Трансляцией из языка L1 ⊆ Σ* в язык L2
- 3. Хотя в общем случае в трансляции τ одному входному предложению x может соответствовать несколько выходных пред-ложений
- 4. Пример 1.1. Предположим, что мы хотим закодировать некоторый текст с помощью азбуки Морзе. Как известно, в
- 5. Очевидно, что трансляцию предложений, например, на русском языке, в код Морзе можно реализовать с помощью гомомор-физма,
- 6. Для любой входной цепочки x = a1a2 … an, ai∈Σ, i=1,2,…,n, гомоморфизм h позволяет найти соответствующую
- 7. Гомоморфизм h определяет трансляцию τ(h) = {(x, h(x)) | x∈Σ*}. Устройство, которое по заданной цепочке x∈Σ*
- 8. Реалистичным примером транслятора, основанного на гомоморфизме, является простейший ассемблер. Транслятором для данной трансляции τ называется такое
- 9. Желательными свойствами транслятора являются: 1) эффективность (время, затрачиваемое на перевод входной строки, должно быть линейно пропорционально
- 10. § 1.2. Схемы синтаксически управляемой трансляции Трансляторы являются средством реализации трансляций, хотя их можно рассматривать также
- 11. Определение 1.2. Схемой синтаксически управляемой трансляции называется фор-мальная система T = (N, Σ, Δ, R, S),
- 12. A→ α, β, где A∈N, α∈(N∪Σ)*, β∈(N∪Δ)*, причём каждое вхождение нетерминала в цепочку α взаимно однозначно
- 13. Для указания связей между вхожде-ниями нетерминалов можно использовать индексы. Например, связанные вхождения одно-имённых нетерминалов помечаются одина-ковыми
- 14. Определение 1.3. Введем понятие трансляционной формы следующим образом: 1) (S, S) — начальная трансляционная форма, причём
- 15. 2) если (αAβ, α’Aβ’) — трансляционная форма, в которой два явно выделенных вхождения нетерминала A связаны,
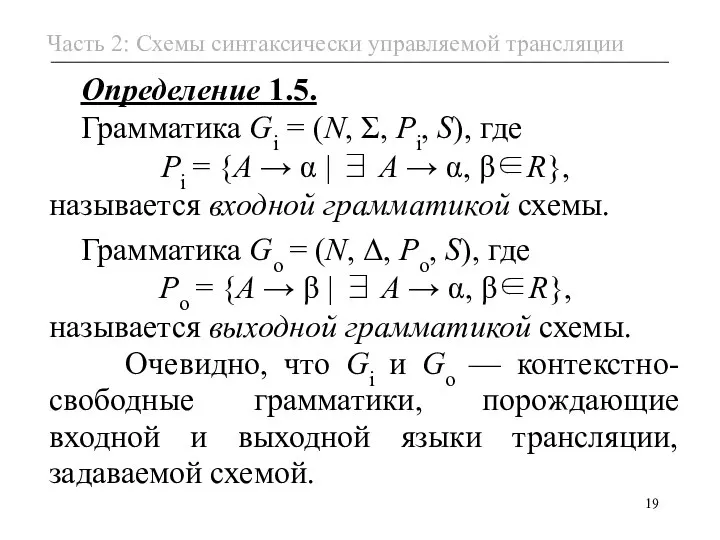
- 19. Определение 1.5. Грамматика Gi = (N, Σ, Pi, S), где Pi = {A → α |
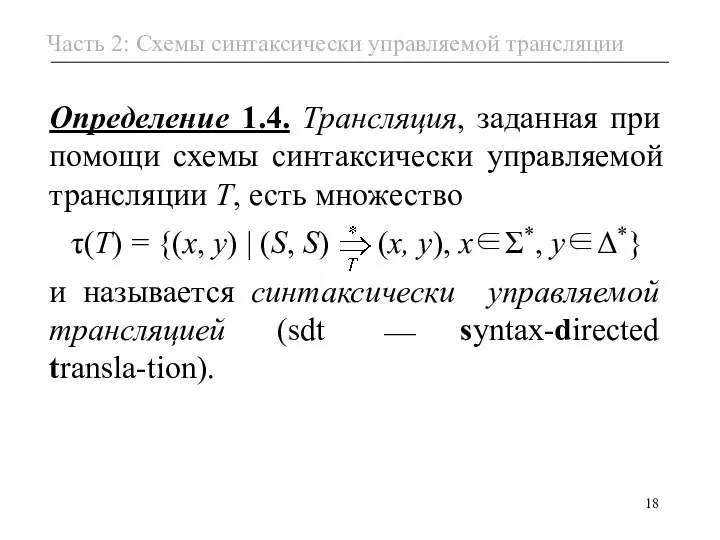
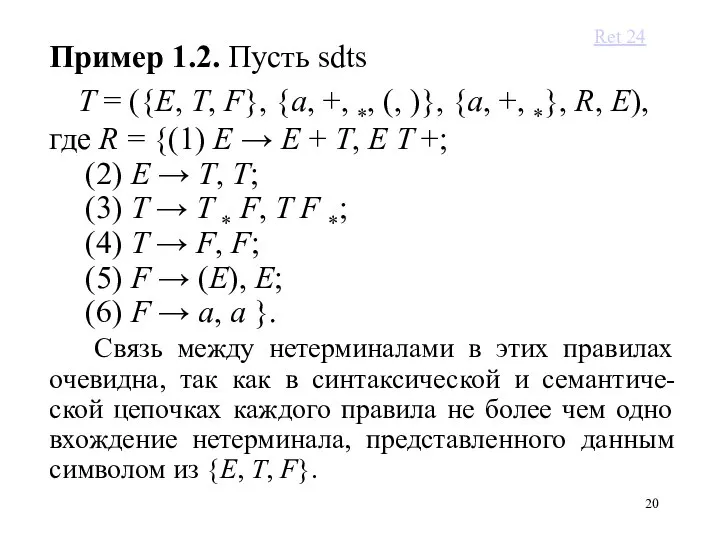
- 20. Пример 1.2. Пусть sdts T = ({E, T, F}, {a, +, *, (, )}, {a, +,
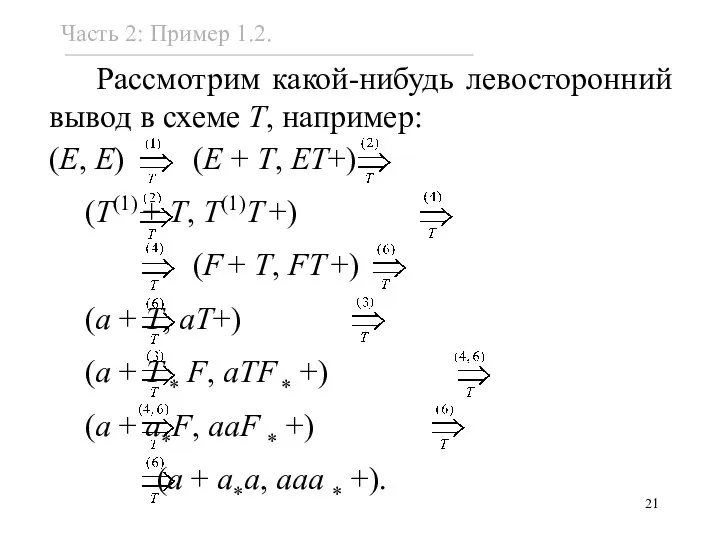
- 21. Часть 2: Пример 1.2.
- 22. Нетрудно догадаться, что τ(T) = {(x, y) | x — инфиксная запись, y — эквивалентная постфиксная
- 23. Определение 1.6. Схема синтаксически управляемой трансляции называется простой, если в каждом её правиле A → α,
- 24. Многие, но не все, полезные трансляции могут быть описаны как простые. В примере 1.2 схема T,
- 25. Другими словами, магазинные преобразо-ватели характеризуют класс простых синтаксически управляемых трансляций таким же образом, как магазинные автоматы
- 26. § 1.3. Магазинные преобразователи и синтаксически управляемые трансляции Здесь мы рассмотрим магазинные преобразователи, отличающиеся от мага-зинных
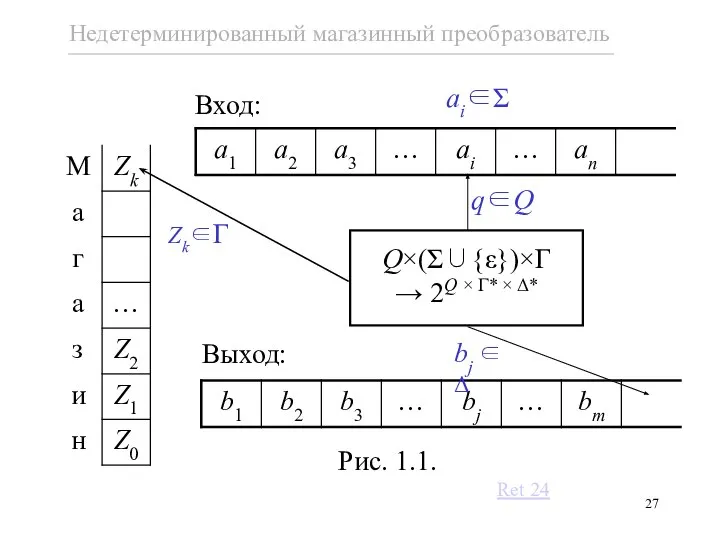
- 27. q∈Q Q×(Σ∪{ε})×Γ → 2Q × Γ* × Δ* Вход: Выход: Рис. 1.1. Ret 24 Zk∈Γ ai∈Σ
- 28. Определение 1.7. Недерминированный магазинный преобразователь (npdt — nondeterministic pushdown transducer) есть формальная система P = (Q,
- 29. Запись δ(q, a, Z) = означает, что npdt P, находясь в состоянии q∈Q, сканируя a∈Σ на
- 30. При этом входная головка сдвигается на одну ячейку вправо, если a ≠ ε, иначе головка остается
- 31. В частности: если a = ε, то выбор действия не зависит от текущего входного символа и,
- 32. В начальный момент q = q0, в магазине находится единственный символ Z0, входная головка сканирует первую
- 33. Определение 1.8. Конфигурацией магазин-ного преобразователя P назовем четверку (q, x, α, y), где q∈Q — текущее
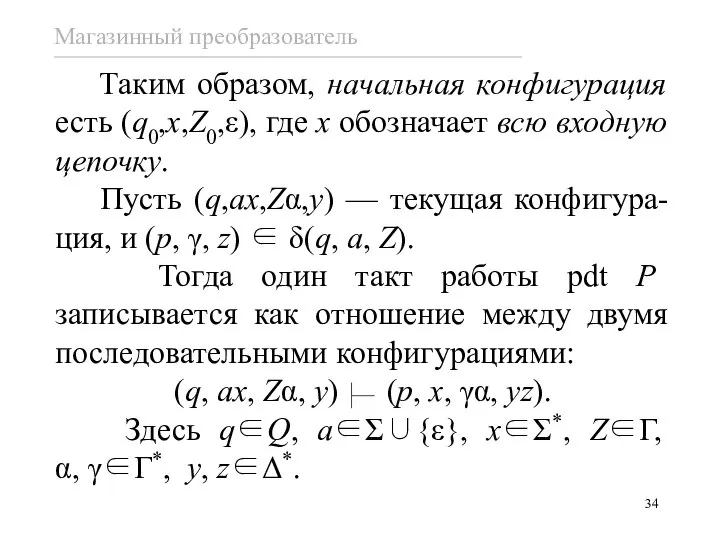
- 34. Таким образом, начальная конфигурация есть (q0,x,Z0,ε), где x обозначает всю входную цепочку. Пусть (q,ax,Zα,y) — текущая
- 35. Как обычно, определяются степень ( ), транзитивное замыкание ( ) и рефлексивно-транзитивное замыкание ( ) этого
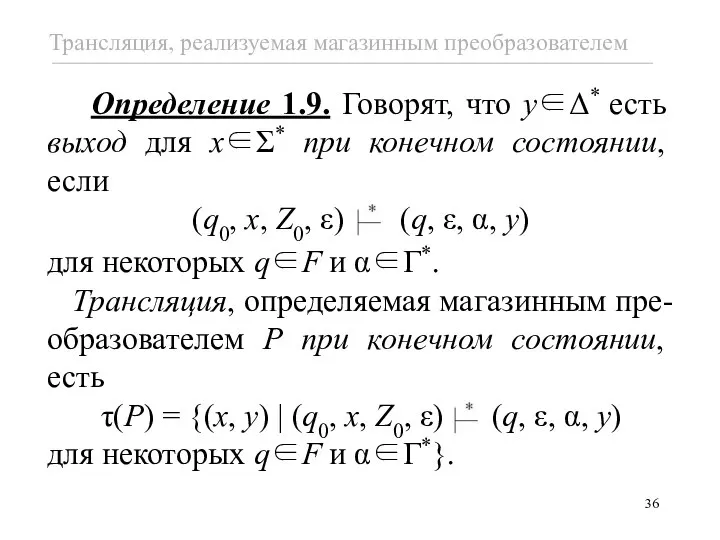
- 36. Определение 1.9. Говорят, что y∈Δ* есть выход для x∈Σ* при конечном состоянии, если (q0, x, Z0,
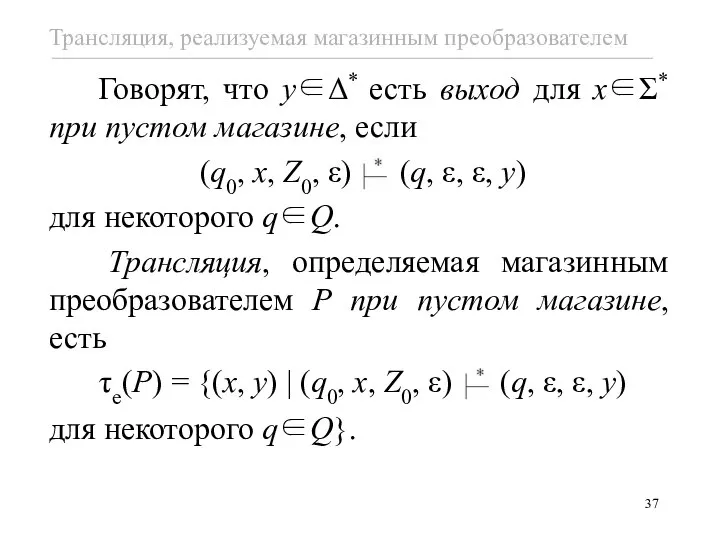
- 37. Говорят, что y∈Δ* есть выход для x∈Σ* при пустом магазине, если (q0, x, Z0, ε) (q,
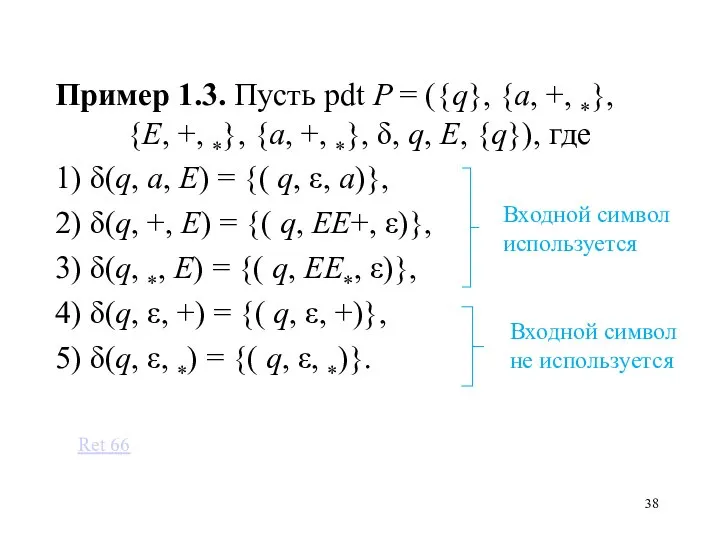
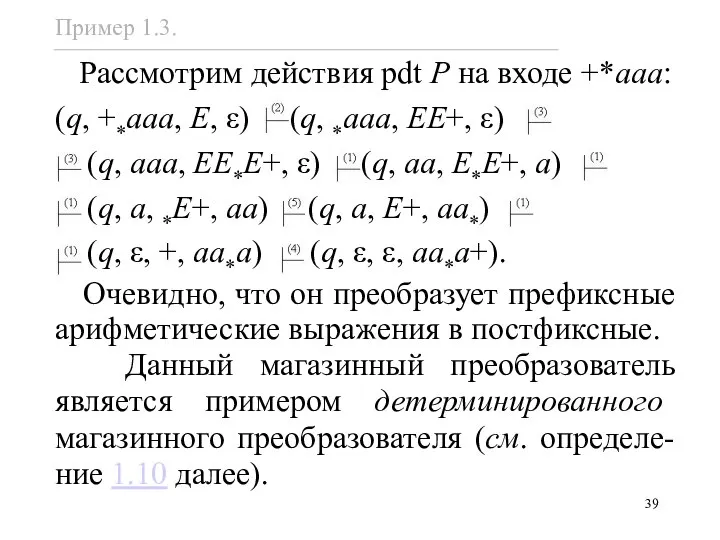
- 38. Пример 1.3. Пусть pdt P = ({q}, {a, +, *}, {E, +, *}, {a, +, *},
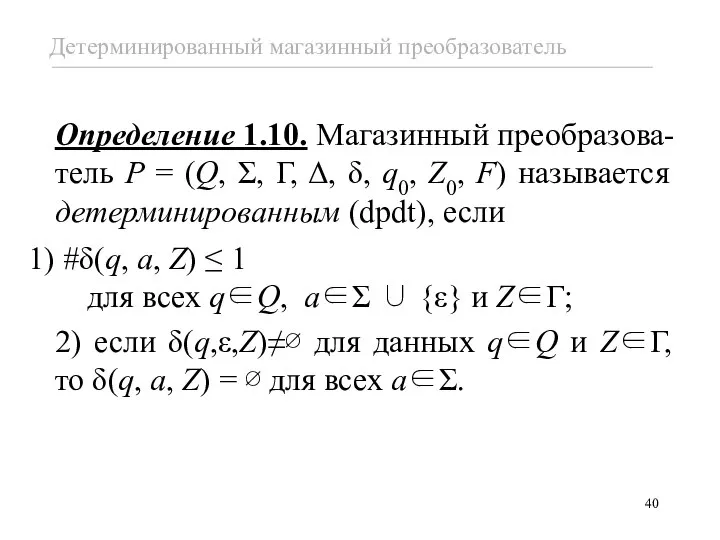
- 40. Определение 1.10. Магазинный преобразова-тель P = (Q, Σ, Γ, Δ, δ, q0, Z0, F) называется детерминированным
- 41. На практике предпочитают использовать детерминированными магазинными преоб-разователями (dpdt), поскольку в реализации они оказываются более эффективными по
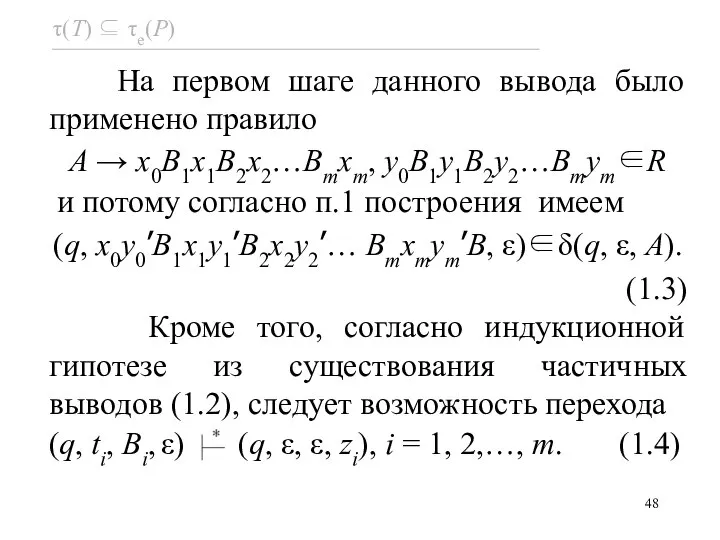
- 42. Лемма 1.1. Пусть T = (N, Σ, Δ, R, S) — простая схема синтаксически управляемой трансляции.
- 43. Положим P = ({q}, Σ, N ∪ Σ ∪ Δ’, Δ , δ, q, S, ∅).
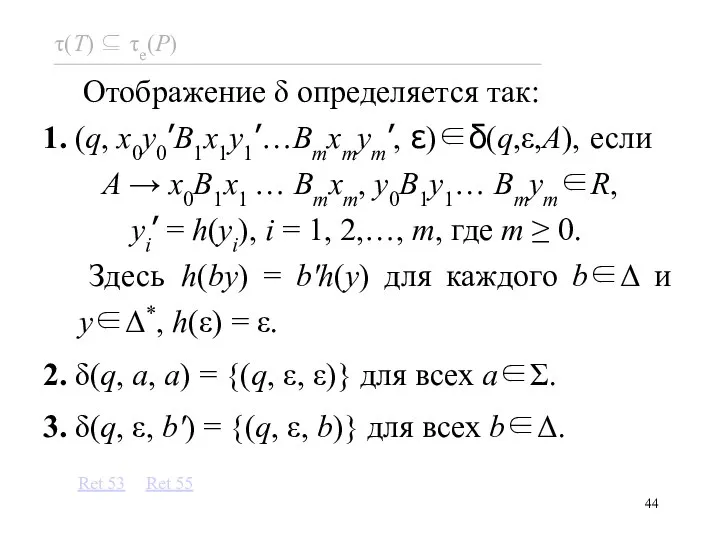
- 44. Отображение δ определяется так: 1. (q, x0y0’B1x1y1’…Bmxmym’, ε)∈δ(q,ε,A), если A → x0B1x1 … Bmxm, y0B1y1… Bmym∈R,
- 45. Ret 52
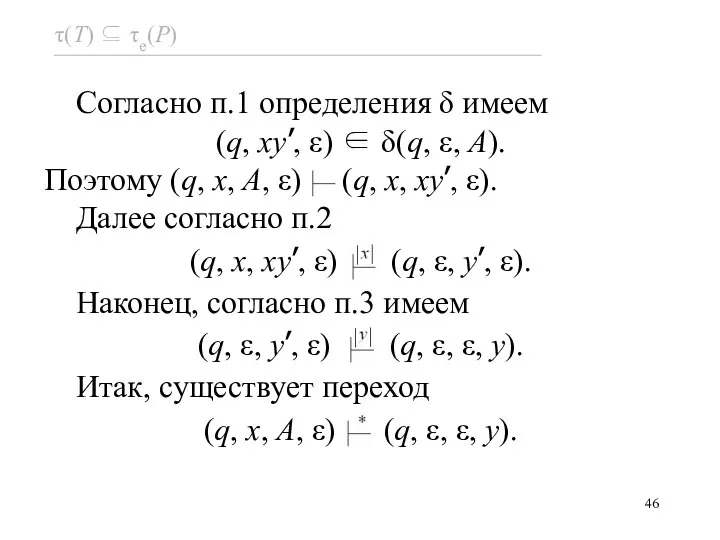
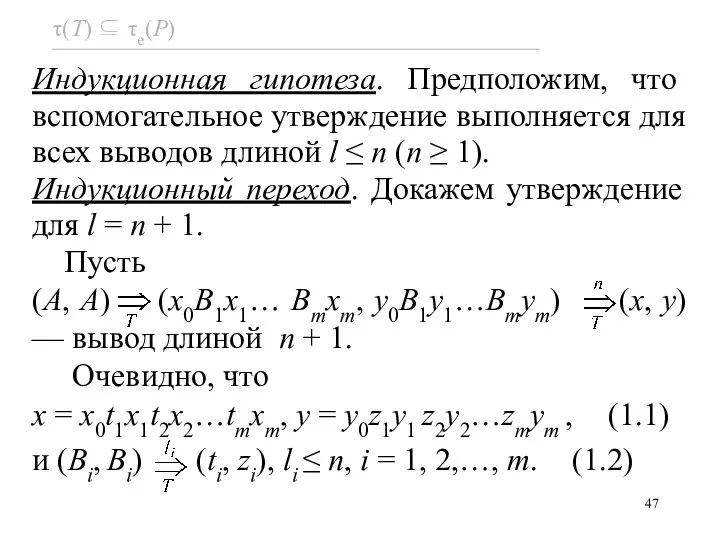
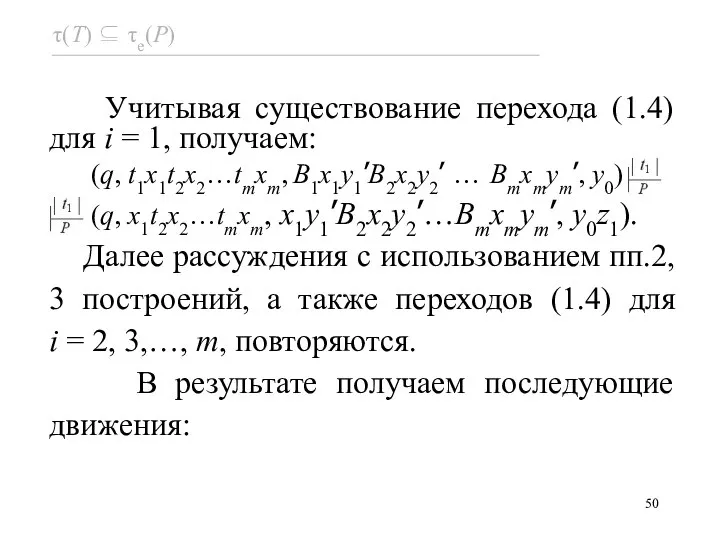
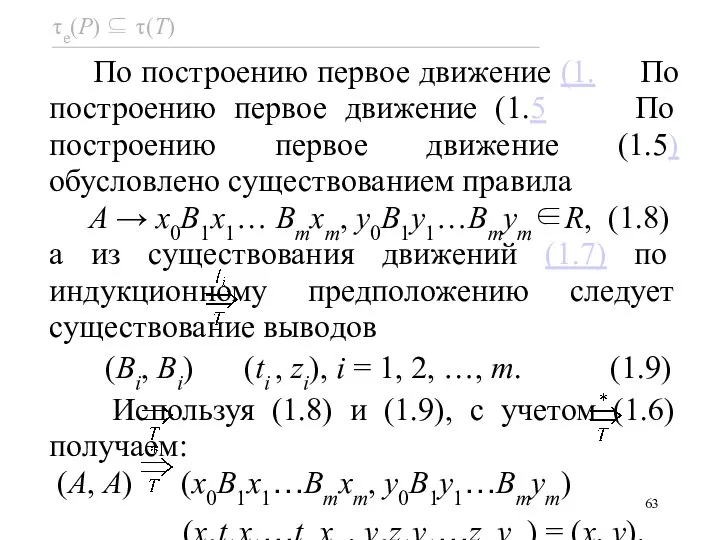
- 48. На первом шаге данного вывода было применено правило A → x0B1x1B2x2…Bmxm, y0B1y1B2y2…Bmym∈R и потому согласно п.1
- 49. Рассмотрим движения pdt P. Учитывая условия (1.1) и (1.3), имеем (q, x, A, ε) = (q,
- 55. Кроме того, магазинная цепочка, заме-щающая A на вершине магазина, должна начинаться на x, так как только
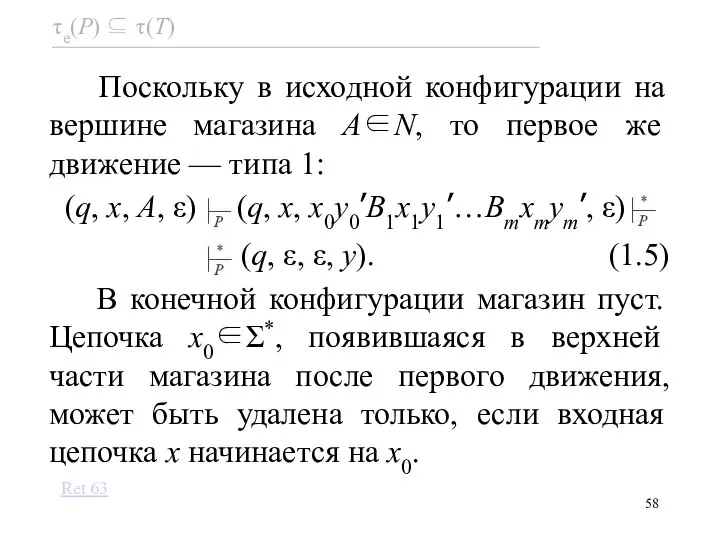
- 58. Поскольку в исходной конфигурации на вершине магазина A∈N, то первое же движение — типа 1: (q,
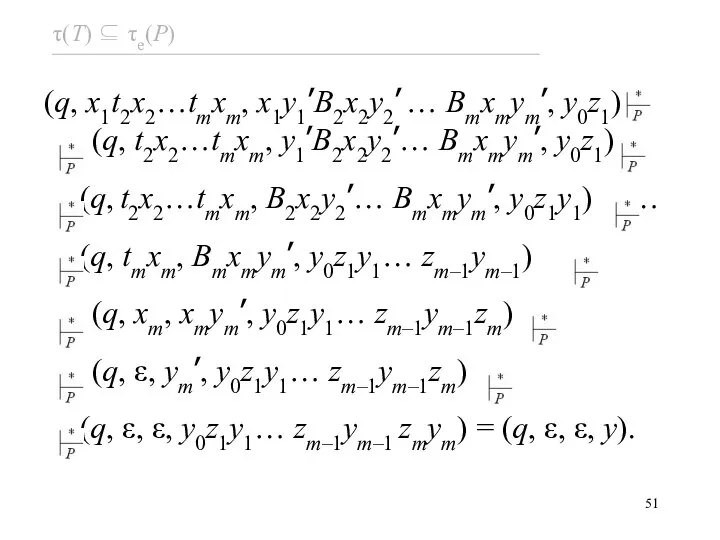
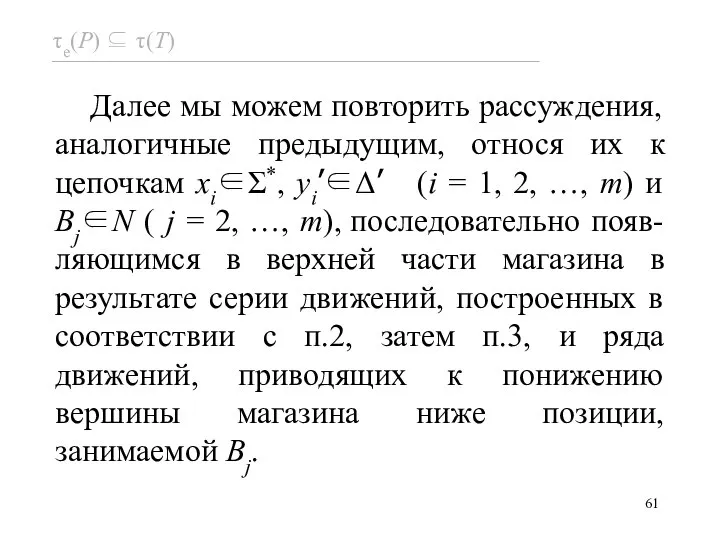
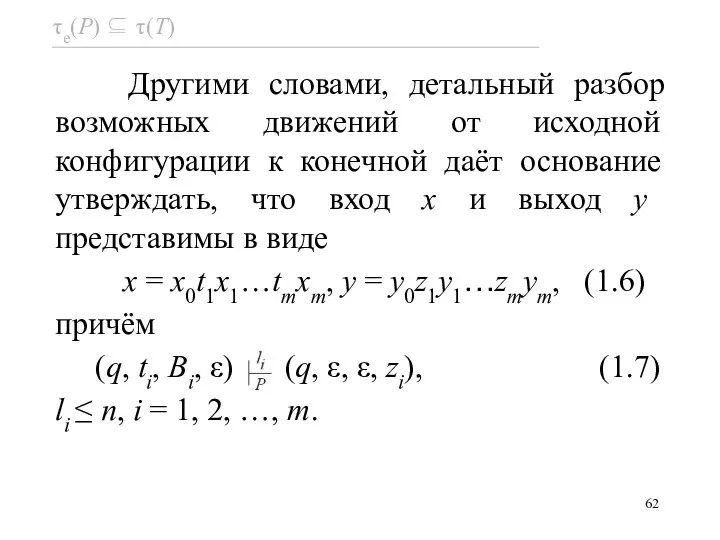
- 61. Далее мы можем повторить рассуждения, аналогичные предыдущим, относя их к цепочкам xi∈Σ*, yi’∈Δ’ (i = 1,
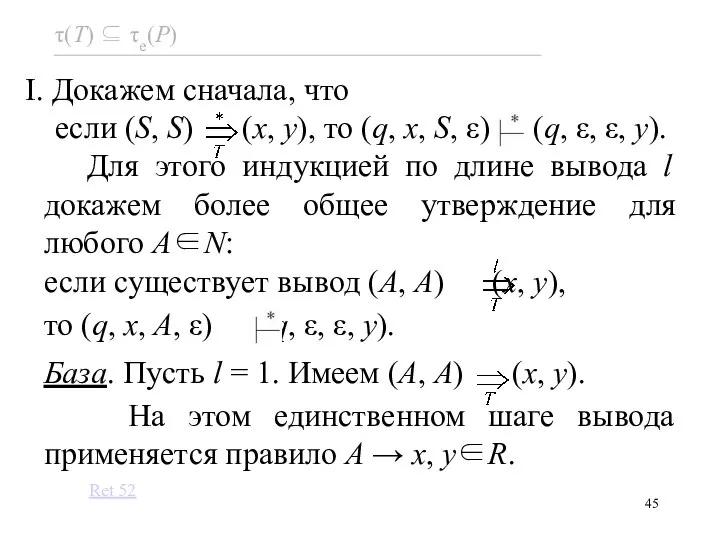
- 64. В частности, при A = S следует утверж-дение II. Из рассуждений I и II следует утверждение
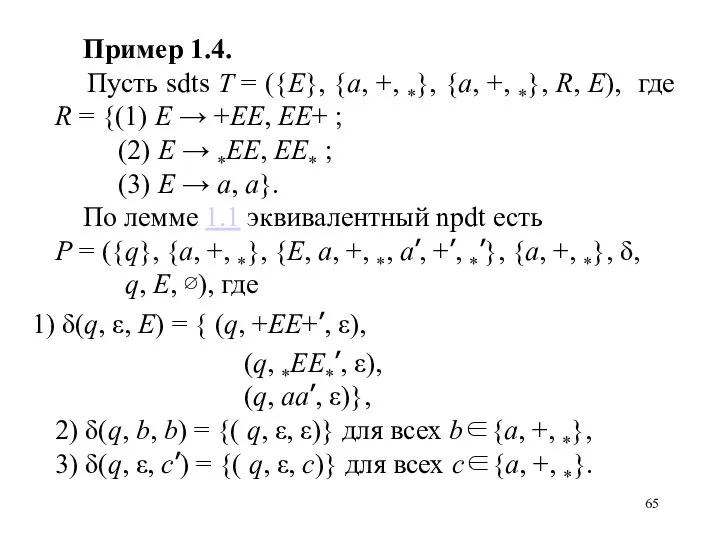
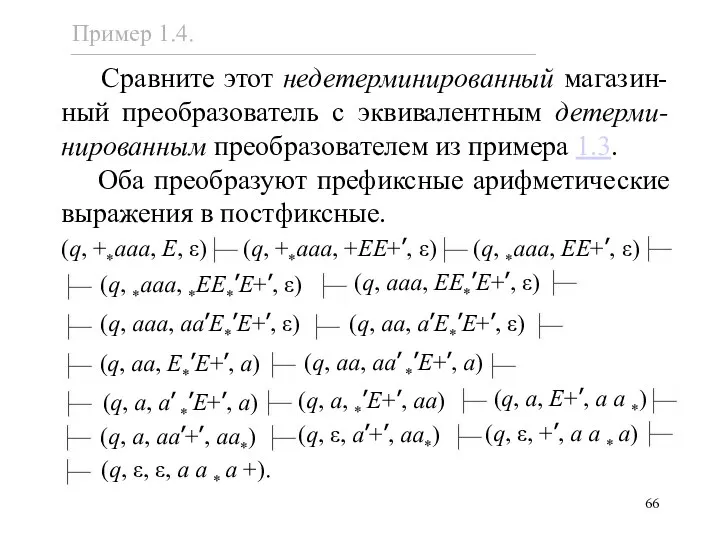
- 65. Пример 1.4. Пусть sdts T = ({E}, {a, +, *}, {a, +, *}, R, E), где
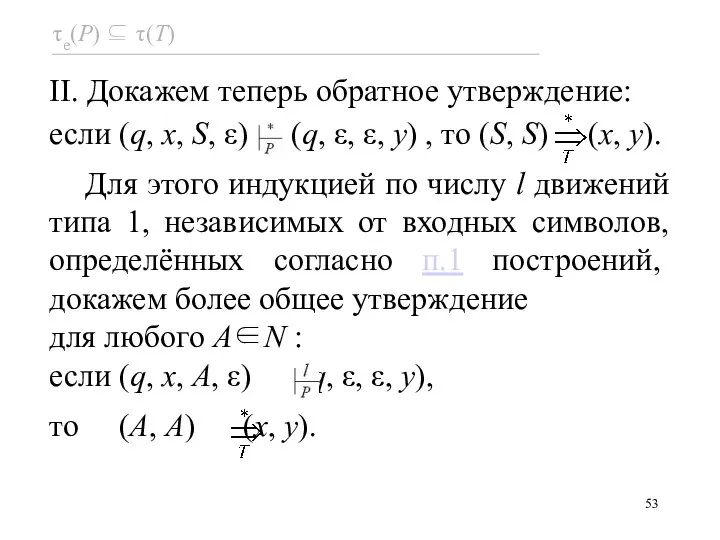
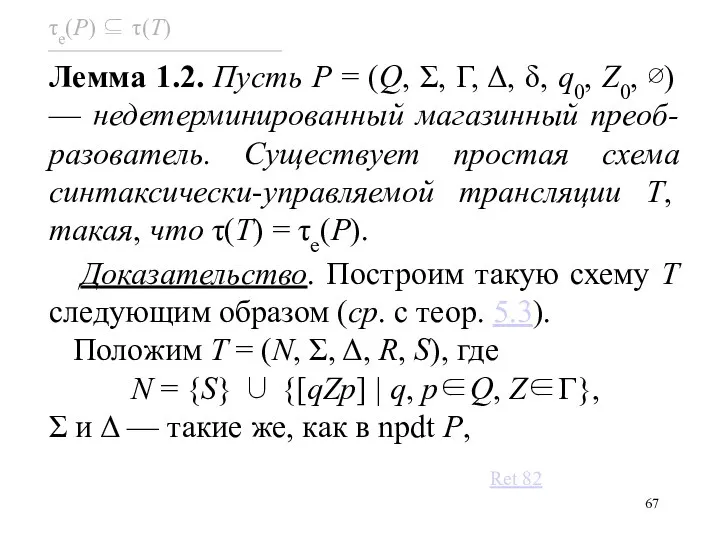
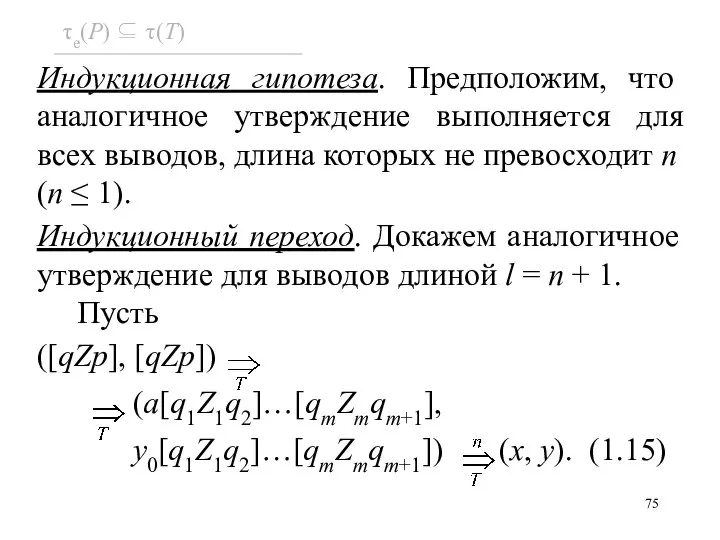
- 67. Лемма 1.2. Пусть P = (Q, Σ, Γ, Δ, δ, q0, Z0, ∅) — недетерминированный магазинный
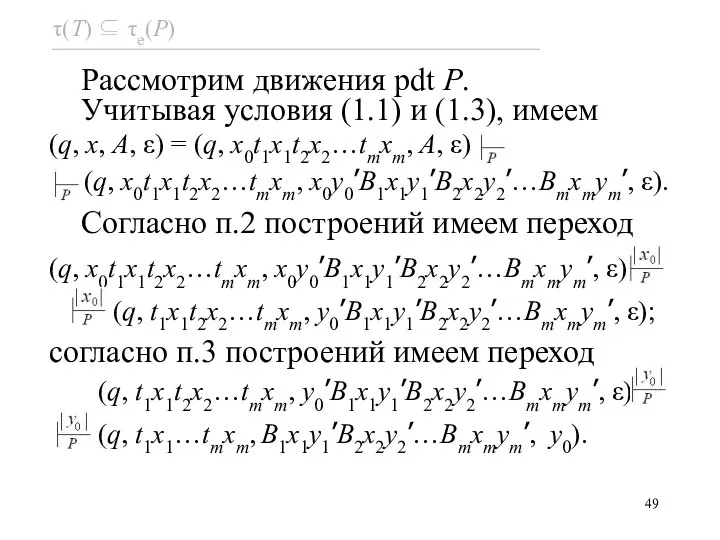
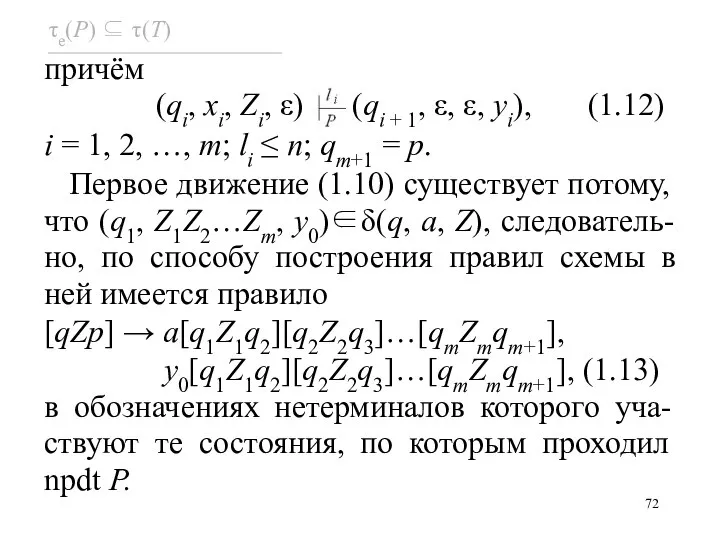
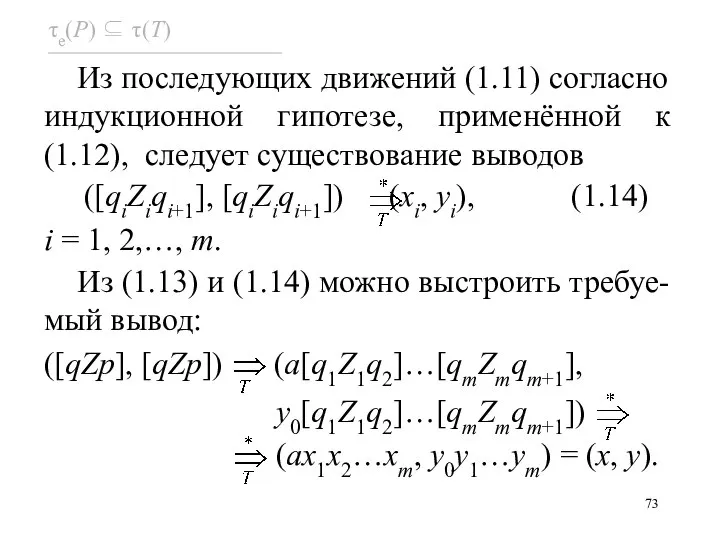
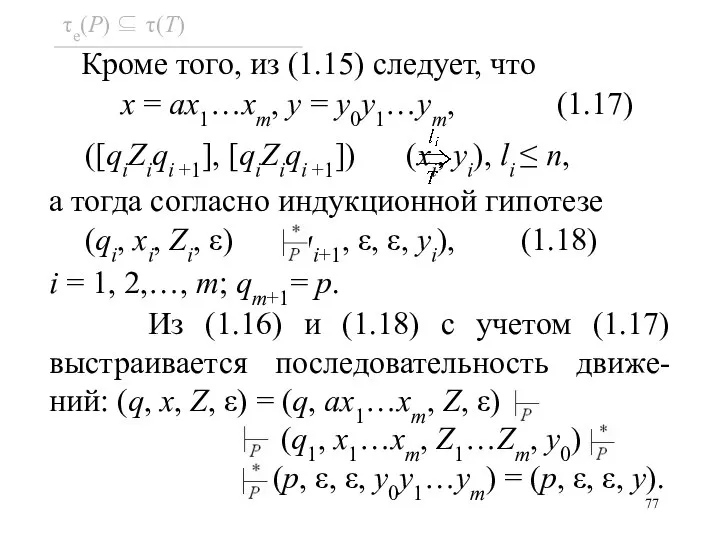
- 76. Из (1.15) следует, что существует правило [qZp] → a[q1Z1q2]…[qmZmqm+1], y[q1Z1q2]…[qmZmqm+1]∈R, которое обязано своим происхождение тому, что
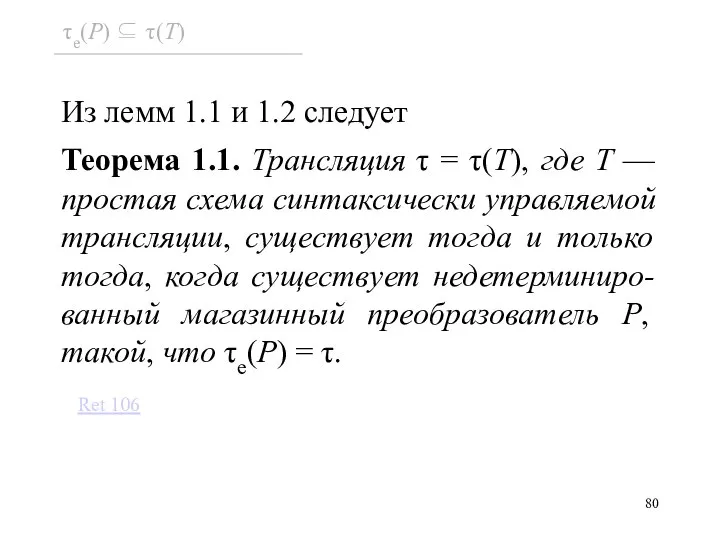
- 80. Из лемм 1.1 и 1.2 следует Теорема 1.1. Трансляция τ = τ(T), где T — простая
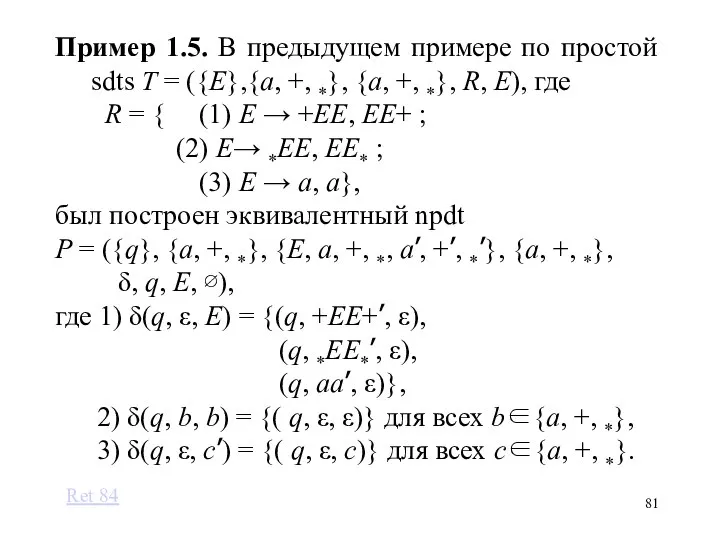
- 81. Пример 1.5. В предыдущем примере по простой sdts T = ({E},{a, +, *}, {a, +, *},
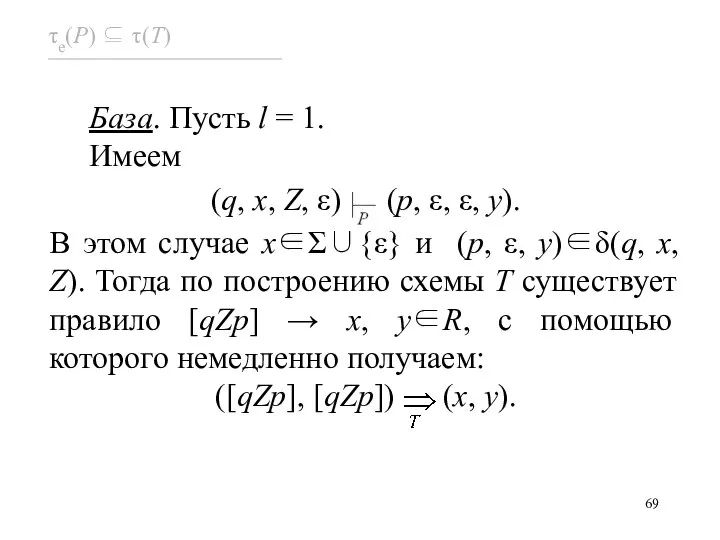
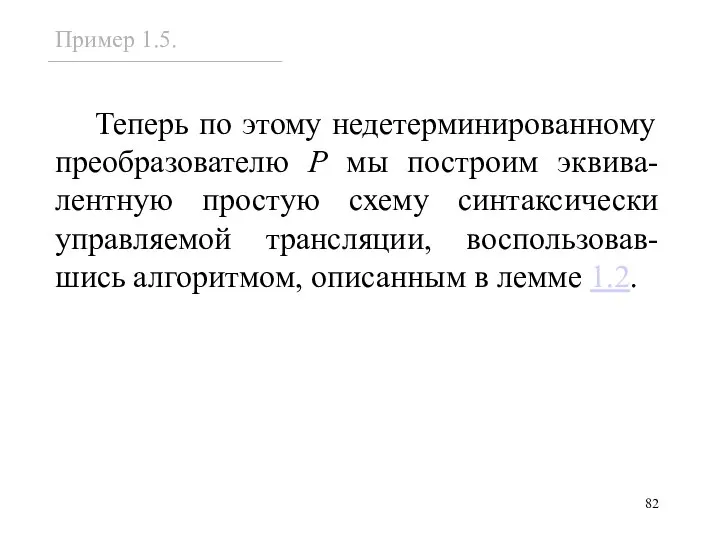
- 82. Теперь по этому недетерминированному преобразователю P мы построим эквива-лентную простую схему синтаксически управляемой трансляции, воспользовав-шись алгоритмом,
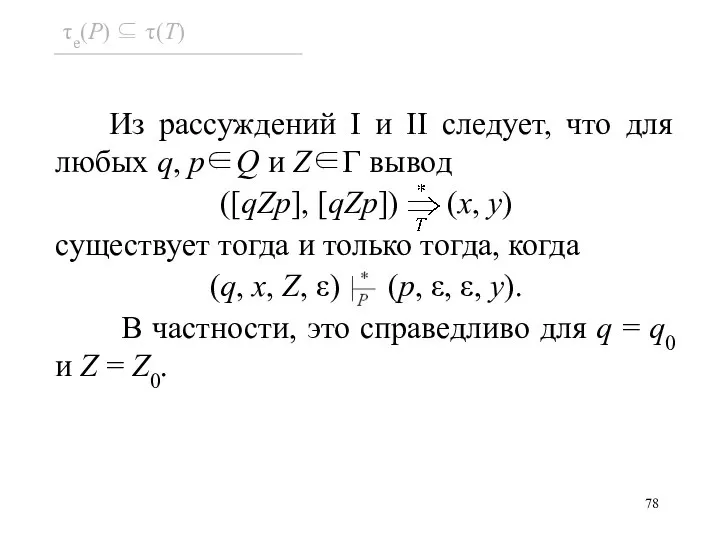
- 83. Положим T = ({S, [qEq], [qaq], [q+q], [q*q], [qa’q], [q+’q], [q*’q]}, {a, +, *},{a, +, *},
- 84. Эта схема мало похожа на исходную, в которой было всего три правила. Однако её можно эквивалентными
- 86. Скачать презентацию
Слайд 3 Хотя в общем случае в трансляции τ одному входному предложению x
Хотя в общем случае в трансляции τ одному входному предложению x
Слайд 4 Пример 1.1. Предположим, что мы хотим закодировать некоторый текст с помощью
Пример 1.1. Предположим, что мы хотим закодировать некоторый текст с помощью
Слайд 5 Очевидно, что трансляцию предложений, например, на русском языке, в код Морзе
Очевидно, что трансляцию предложений, например, на русском языке, в код Морзе
Слайд 6 Для любой входной цепочки x = a1a2 … an, ai∈Σ, i=1,2,…,n,
Для любой входной цепочки x = a1a2 … an, ai∈Σ, i=1,2,…,n,
Слайд 7 Гомоморфизм h определяет трансляцию
τ(h) = {(x, h(x)) | x∈Σ*}.
Устройство,
Гомоморфизм h определяет трансляцию
τ(h) = {(x, h(x)) | x∈Σ*}.
Устройство,
Слайд 8 Реалистичным примером транслятора, основанного на гомоморфизме, является простейший ассемблер.
Транслятором для
Реалистичным примером транслятора, основанного на гомоморфизме, является простейший ассемблер.
Транслятором для
Слайд 9 Желательными свойствами транслятора являются:
1) эффективность (время, затрачиваемое на перевод входной
Желательными свойствами транслятора являются:
1) эффективность (время, затрачиваемое на перевод входной
Слайд 10§ 1.2. Схемы синтаксически
управляемой трансляции
Трансляторы являются средством реализации трансляций,
§ 1.2. Схемы синтаксически
управляемой трансляции
Трансляторы являются средством реализации трансляций,
Слайд 11 Определение 1.2. Схемой синтаксически управляемой трансляции называется фор-мальная система T =
Определение 1.2. Схемой синтаксически управляемой трансляции называется фор-мальная система T =
Слайд 12A→ α, β, где A∈N, α∈(N∪Σ)*, β∈(N∪Δ)*,
причём каждое вхождение нетерминала в
A→ α, β, где A∈N, α∈(N∪Σ)*, β∈(N∪Δ)*,
причём каждое вхождение нетерминала в
Слайд 13 Для указания связей между вхожде-ниями нетерминалов можно использовать индексы.
Например,
Для указания связей между вхожде-ниями нетерминалов можно использовать индексы.
Например,
Слайд 14 Определение 1.3. Введем понятие трансляционной формы следующим образом:
1) (S, S) —
Определение 1.3. Введем понятие трансляционной формы следующим образом:
1) (S, S) —
Слайд 152) если (αAβ, α’Aβ’) — трансляционная форма, в которой два явно выделенных
2) если (αAβ, α’Aβ’) — трансляционная форма, в которой два явно выделенных
Слайд 19 Определение 1.5.
Грамматика Gi = (N, Σ, Pi, S), где
Определение 1.5.
Грамматика Gi = (N, Σ, Pi, S), где
Слайд 20Пример 1.2. Пусть sdts
T = ({E, T, F}, {a, +, *,
Пример 1.2. Пусть sdts
T = ({E, T, F}, {a, +, *,
Слайд 21Часть 2: Пример 1.2.
Часть 2: Пример 1.2.
Слайд 22 Нетрудно догадаться, что
τ(T) = {(x, y) |
x —
Нетрудно догадаться, что
τ(T) = {(x, y) |
x —
Слайд 23 Определение 1.6. Схема синтаксически управляемой трансляции называется простой, если в каждом
Определение 1.6. Схема синтаксически управляемой трансляции называется простой, если в каждом
Слайд 24 Многие, но не все, полезные трансляции могут быть описаны как простые.
Многие, но не все, полезные трансляции могут быть описаны как простые.
Слайд 25 Другими словами, магазинные преобразо-ватели характеризуют класс простых синтаксически управляемых трансляций таким
Другими словами, магазинные преобразо-ватели характеризуют класс простых синтаксически управляемых трансляций таким
Слайд 26§ 1.3. Магазинные преобразователи и
синтаксически управляемые трансляции
Здесь мы рассмотрим
§ 1.3. Магазинные преобразователи и
синтаксически управляемые трансляции
Здесь мы рассмотрим
Слайд 27q∈Q
Q×(Σ∪{ε})×Γ
→ 2Q × Γ* × Δ*
Вход:
Выход:
Рис. 1.1.
Ret 24
Zk∈Γ
ai∈Σ
bj ∈ Δ
q∈Q
Q×(Σ∪{ε})×Γ
→ 2Q × Γ* × Δ*
Вход:
Выход:
Рис. 1.1.
Ret 24
Zk∈Γ
ai∈Σ
bj ∈ Δ
Слайд 28 Определение 1.7.
Недерминированный магазинный преобразователь (npdt — nondeterministic pushdown transducer)
Определение 1.7.
Недерминированный магазинный преобразователь (npdt — nondeterministic pushdown transducer)
Слайд 29 Запись
δ(q, a, Z) =
означает, что npdt P, находясь
Запись
δ(q, a, Z) =
означает, что npdt P, находясь
Слайд 30 При этом входная головка сдвигается на одну ячейку вправо, если a
При этом входная головка сдвигается на одну ячейку вправо, если a
Слайд 31В частности:
если a = ε, то выбор действия не зависит от
В частности:
если a = ε, то выбор действия не зависит от
Слайд 32В начальный момент q = q0, в магазине находится единственный символ Z0,
В начальный момент q = q0, в магазине находится единственный символ Z0,
Слайд 33 Определение 1.8. Конфигурацией магазин-ного преобразователя P назовем четверку (q, x, α,
Определение 1.8. Конфигурацией магазин-ного преобразователя P назовем четверку (q, x, α,
Слайд 34 Таким образом, начальная конфигурация есть (q0,x,Z0,ε), где x обозначает всю входную
Таким образом, начальная конфигурация есть (q0,x,Z0,ε), где x обозначает всю входную
Слайд 35 Как обычно, определяются степень ( ), транзитивное замыкание ( ) и
Как обычно, определяются степень ( ), транзитивное замыкание ( ) и
Слайд 36 Определение 1.9. Говорят, что y∈Δ* есть выход для x∈Σ* при конечном
Определение 1.9. Говорят, что y∈Δ* есть выход для x∈Σ* при конечном
Слайд 37 Говорят, что y∈Δ* есть выход для x∈Σ* при пустом магазине, если
Говорят, что y∈Δ* есть выход для x∈Σ* при пустом магазине, если
Слайд 38Пример 1.3. Пусть pdt P = ({q}, {a, +, *},
{E,
Пример 1.3. Пусть pdt P = ({q}, {a, +, *},
{E,
Слайд 40Определение 1.10. Магазинный преобразова-тель P = (Q, Σ, Γ, Δ, δ, q0,
Определение 1.10. Магазинный преобразова-тель P = (Q, Σ, Γ, Δ, δ, q0,
Слайд 41 На практике предпочитают использовать детерминированными магазинными преоб-разователями (dpdt), поскольку в реализации
На практике предпочитают использовать детерминированными магазинными преоб-разователями (dpdt), поскольку в реализации
Слайд 42Лемма 1.1. Пусть T = (N, Σ, Δ, R, S) — простая
Лемма 1.1. Пусть T = (N, Σ, Δ, R, S) — простая
Слайд 43 Положим
P = ({q}, Σ, N ∪ Σ ∪ Δ’, Δ
Положим
P = ({q}, Σ, N ∪ Σ ∪ Δ’, Δ
Слайд 44 Отображение δ определяется так:
1. (q, x0y0’B1x1y1’…Bmxmym’, ε)∈δ(q,ε,A), если
A →
Отображение δ определяется так:
1. (q, x0y0’B1x1y1’…Bmxmym’, ε)∈δ(q,ε,A), если
A →
Слайд 45Ret 52
Ret 52
Слайд 48 На первом шаге данного вывода было применено правило
A → x0B1x1B2x2…Bmxm, y0B1y1B2y2…Bmym∈R
На первом шаге данного вывода было применено правило
A → x0B1x1B2x2…Bmxm, y0B1y1B2y2…Bmym∈R
Слайд 49 Рассмотрим движения pdt P.
Учитывая условия (1.1) и (1.3), имеем
(q,
Рассмотрим движения pdt P.
Учитывая условия (1.1) и (1.3), имеем
(q,
Слайд 55 Кроме того, магазинная цепочка, заме-щающая A на вершине магазина, должна начинаться
Кроме того, магазинная цепочка, заме-щающая A на вершине магазина, должна начинаться
Слайд 58 Поскольку в исходной конфигурации на вершине магазина A∈N, то первое же
Поскольку в исходной конфигурации на вершине магазина A∈N, то первое же
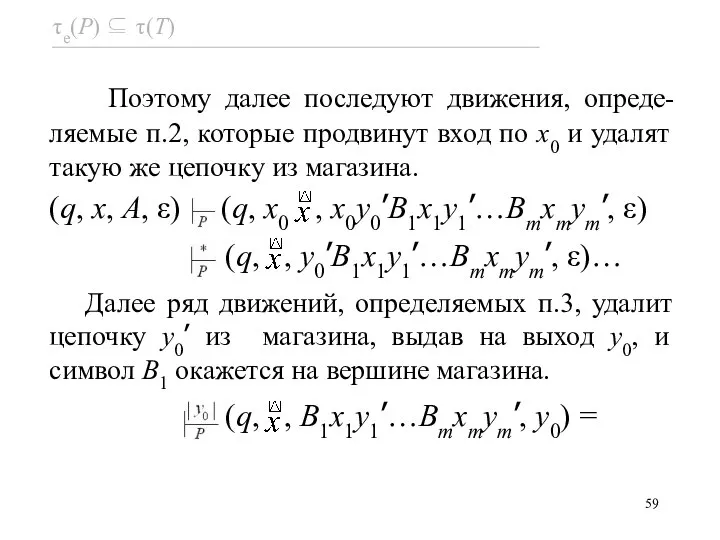
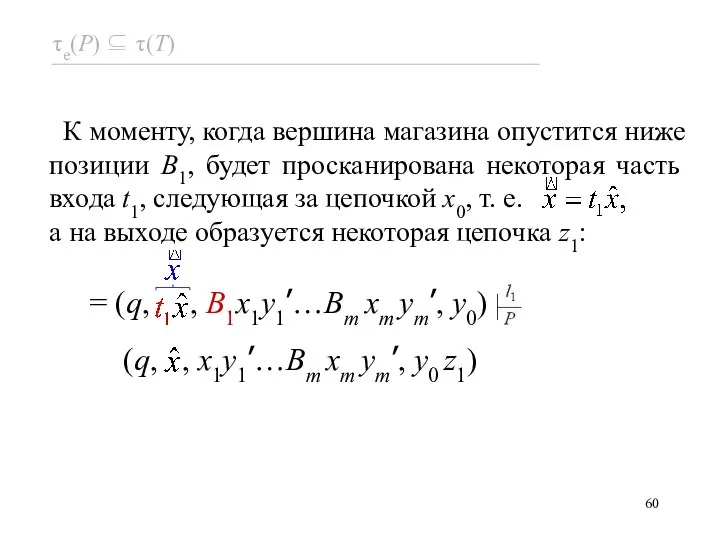
Слайд 61 Далее мы можем повторить рассуждения, аналогичные предыдущим, относя их к цепочкам
Далее мы можем повторить рассуждения, аналогичные предыдущим, относя их к цепочкам
Слайд 64 В частности, при A = S следует утверж-дение II.
Из
В частности, при A = S следует утверж-дение II.
Из
Слайд 65 Пример 1.4.
Пусть sdts T = ({E}, {a, +, *},
Пример 1.4.
Пусть sdts T = ({E}, {a, +, *},
Слайд 67Лемма 1.2. Пусть P = (Q, Σ, Γ, Δ, δ, q0, Z0,
Лемма 1.2. Пусть P = (Q, Σ, Γ, Δ, δ, q0, Z0,
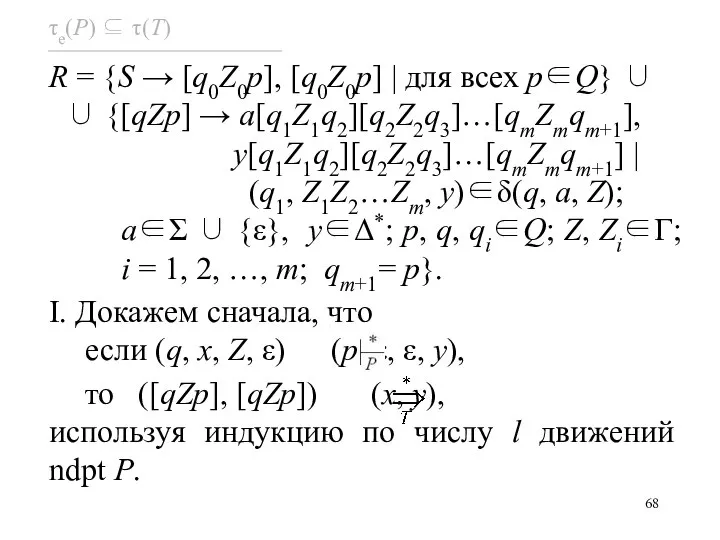
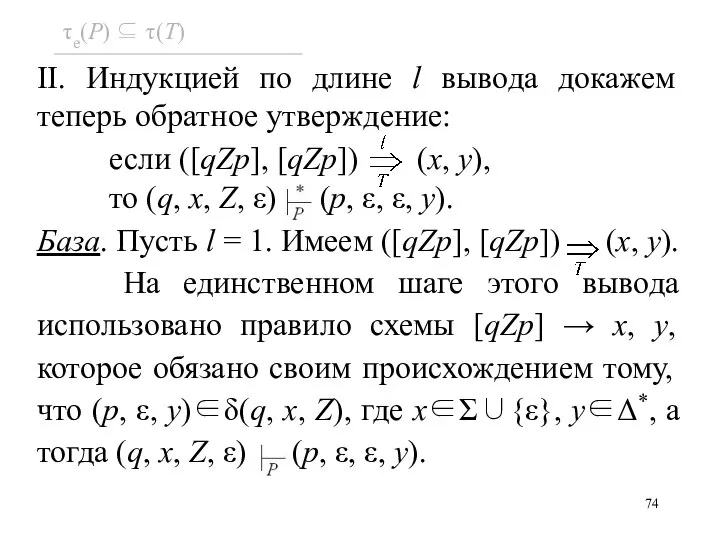
Слайд 76 Из (1.15) следует, что существует правило
[qZp] → a[q1Z1q2]…[qmZmqm+1],
y[q1Z1q2]…[qmZmqm+1]∈R,
которое обязано
Из (1.15) следует, что существует правило
[qZp] → a[q1Z1q2]…[qmZmqm+1],
y[q1Z1q2]…[qmZmqm+1]∈R,
которое обязано
![Из (1.15) следует, что существует правило [qZp] → a[q1Z1q2]…[qmZmqm+1], y[q1Z1q2]…[qmZmqm+1]∈R, которое обязано](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1159072/slide-75.jpg)
Слайд 80Из лемм 1.1 и 1.2 следует
Теорема 1.1. Трансляция τ = τ(T),
Из лемм 1.1 и 1.2 следует
Теорема 1.1. Трансляция τ = τ(T),
Слайд 81Пример 1.5. В предыдущем примере по простой sdts T = ({E},{a, +,
Пример 1.5. В предыдущем примере по простой sdts T = ({E},{a, +,
Слайд 82 Теперь по этому недетерминированному преобразователю P мы построим эквива-лентную простую схему
Теперь по этому недетерминированному преобразователю P мы построим эквива-лентную простую схему
Слайд 83Положим T = ({S, [qEq], [qaq], [q+q], [q*q],
[qa’q], [q+’q], [q*’q]},
Положим T = ({S, [qEq], [qaq], [q+q], [q*q],
[qa’q], [q+’q], [q*’q]},
![Положим T = ({S, [qEq], [qaq], [q+q], [q*q], [qa’q], [q+’q], [q*’q]}, {a,](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1159072/slide-82.jpg)
Слайд 84 Эта схема мало похожа на исходную, в которой было всего три
Эта схема мало похожа на исходную, в которой было всего три
 Операционные системы
Операционные системы Quzziz – ещё один сервис для создания опросов и викторин
Quzziz – ещё один сервис для создания опросов и викторин Pixel art - направление цифрового искусства, которое заключается в создании изображений на уровне пикселя
Pixel art - направление цифрового искусства, которое заключается в создании изображений на уровне пикселя Основные этапы решения задач на компьютере
Основные этапы решения задач на компьютере Устройства ввода-вывода данных
Устройства ввода-вывода данных Сюрреалистическая фотоманипуляция Ёжик в Photoshop
Сюрреалистическая фотоманипуляция Ёжик в Photoshop Программа предназначена для автоматической рассылки объявлений на электронные доски
Программа предназначена для автоматической рассылки объявлений на электронные доски Модификация данных
Модификация данных Измерение текстовой информации
Измерение текстовой информации Шаблон работы с систематическим обзором
Шаблон работы с систематическим обзором Datu bāzes struktūra – Grāmatas, Mašīnas, Dzīvoklis
Datu bāzes struktūra – Grāmatas, Mašīnas, Dzīvoklis Техническое регулирование и стандартизация в области ИКТ
Техническое регулирование и стандартизация в области ИКТ ERM (Entity-Relation Model) Анализ и проектирование структур данных с использованием CASEсредств
ERM (Entity-Relation Model) Анализ и проектирование структур данных с использованием CASEсредств Занятие 4: f(x) или присутствие ипостеров в джаве
Занятие 4: f(x) или присутствие ипостеров в джаве Программирование (C++)
Программирование (C++) Командная и индивидуальная работа в журалистике
Командная и индивидуальная работа в журалистике Дз перевод из 2-й в 8-ую и 16-ю системы счисления (самостоятельно разобрать)
Дз перевод из 2-й в 8-ую и 16-ю системы счисления (самостоятельно разобрать) Як працює інтернет та браузери
Як працює інтернет та браузери Чек-лист инструментов презентации
Чек-лист инструментов презентации История счета и систем счисления
История счета и систем счисления Программная работа лр 130305 01 сд.уп.04 09 12
Программная работа лр 130305 01 сд.уп.04 09 12 Виды текстовых процессоров и их возможности. Основные элементы. Тема №13
Виды текстовых процессоров и их возможности. Основные элементы. Тема №13 Программные средства визуализации данных
Программные средства визуализации данных Хранение информации
Хранение информации Коммуникационные технологии
Коммуникационные технологии Алгоритмика. Программирование на языке Scratch. Для школьников: 9-11 лет
Алгоритмика. Программирование на языке Scratch. Для школьников: 9-11 лет Изучение модели СМО с повторными заявками в Rockwell Arena
Изучение модели СМО с повторными заявками в Rockwell Arena Памятка по информационной безопасности в виртуальном мире
Памятка по информационной безопасности в виртуальном мире