Анализ влияния динамики космического аппарата на характеристики алгоритмов обработки изображений системы технического зрения п
- Анализ влияния динамики космического аппарата на характеристики алгоритмов обработки изображений системы технического зрения п

Содержание
- 2. Общее описание проекта Задачи проекта: Полет до Марса. Детальная съемка поверхности Фобоса. Уточнение места посадки. Выполнение
- 3. Телевизионная система навигации и наблюдения (ТСНН) Состав ТСНН. Две узкоугольные телевизионные камеры (f=500 mm) Две широкоугольные
- 4. Влияние динамики КА на процесс измерений. 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010”
- 5. Исходные данные для моделирования 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса -
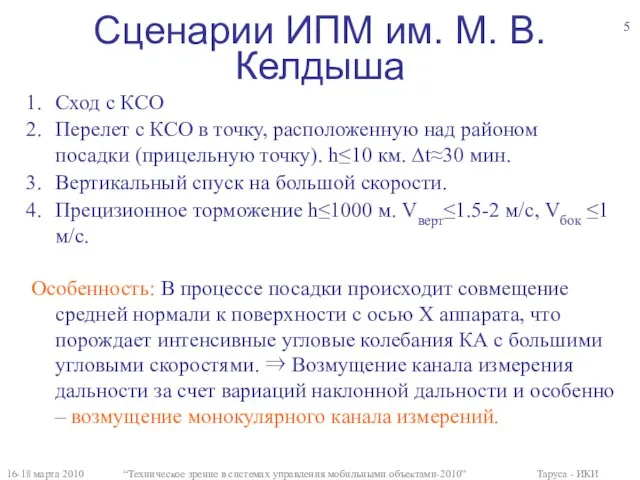
- 6. Сценарии ИПМ им. М. В. Келдыша 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010”
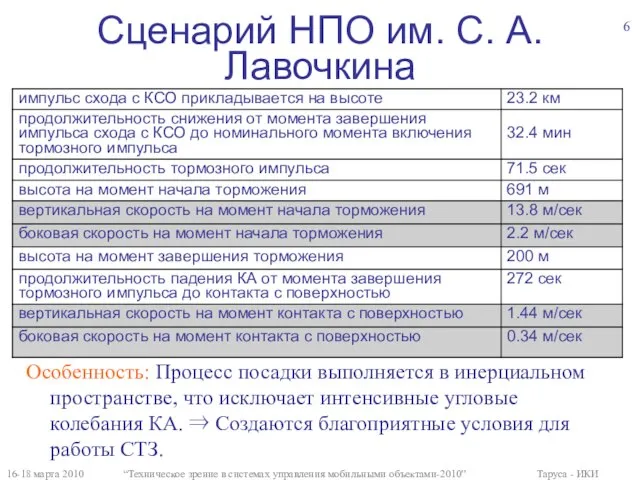
- 7. Сценарий НПО им. С. А. Лавочкина 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010”
- 8. Системы координат Фобоса 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса - ИКИ
- 9. Расположение камер на КА 8 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса
- 10. Стереорежим 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса - ИКИ 9 Высота
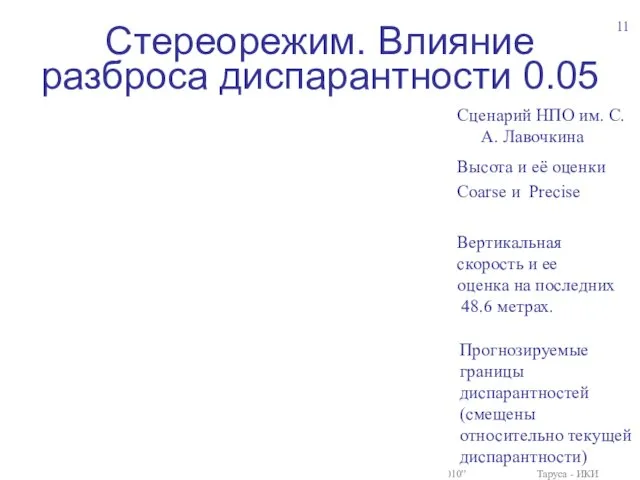
- 11. Стереорежим 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса - ИКИ 10 Прогнозируемые
- 12. Стереорежим. Влияние разброса диспарантности 0.05 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса
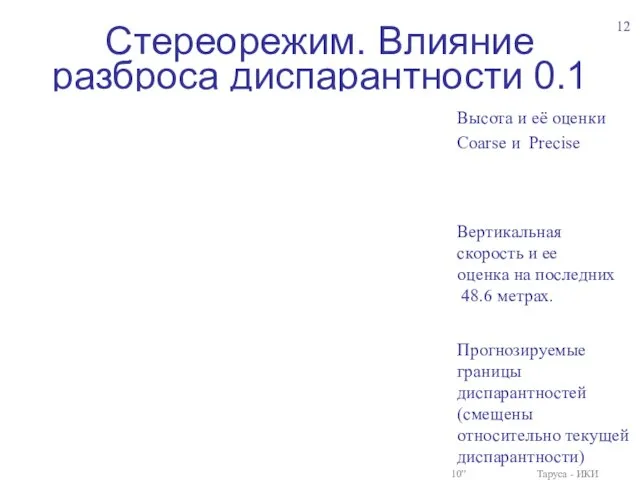
- 13. Стереорежим. Влияние разброса диспарантности 0.1 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса
- 14. Стереорежим 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса - ИКИ Допустим, диспарантность
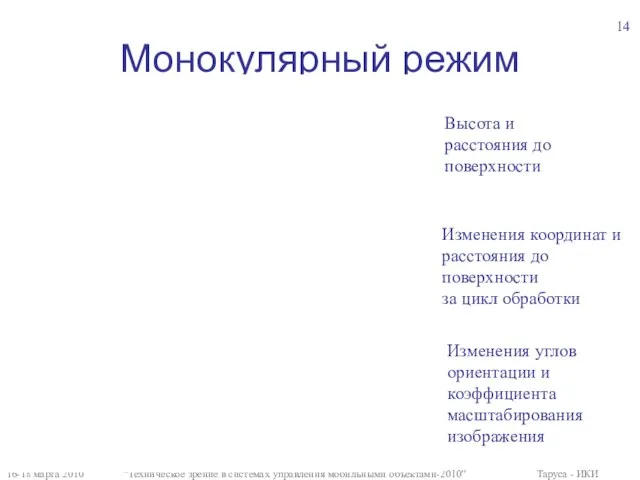
- 15. Монокулярный режим 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса - ИКИ 14
- 16. Монокулярный режим 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса - ИКИ 15
- 17. Прогноз 16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса - ИКИ Простейший рекурсивный
- 19. Скачать презентацию
Слайд 2Общее описание проекта
Задачи проекта:
Полет до Марса.
Детальная съемка поверхности Фобоса.
Уточнение места посадки.
Выполнение посадки.
Взятие
Общее описание проекта
Задачи проекта:
Полет до Марса.
Детальная съемка поверхности Фобоса.
Уточнение места посадки.
Выполнение посадки.
Взятие
Слайд 3Телевизионная система навигации и наблюдения (ТСНН)
Состав ТСНН.
Две узкоугольные телевизионные камеры (f=500 mm)
Две
Телевизионная система навигации и наблюдения (ТСНН)
Состав ТСНН.
Две узкоугольные телевизионные камеры (f=500 mm)
Две
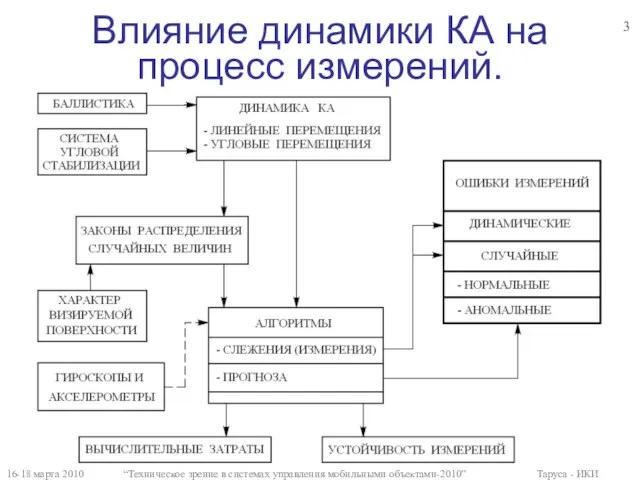
Слайд 4Влияние динамики КА на процесс измерений.
16-18 марта 2010 “Техническое зрение в системах
Влияние динамики КА на процесс измерений.
16-18 марта 2010 “Техническое зрение в системах
Слайд 5Исходные данные для моделирования
16-18 марта 2010 “Техническое зрение в системах управления мобильными
Исходные данные для моделирования
16-18 марта 2010 “Техническое зрение в системах управления мобильными
Слайд 6Сценарии ИПМ им. М. В. Келдыша
16-18 марта 2010 “Техническое зрение в системах
Сценарии ИПМ им. М. В. Келдыша
16-18 марта 2010 “Техническое зрение в системах
Слайд 7Сценарий НПО им. С. А. Лавочкина
16-18 марта 2010 “Техническое зрение в
Сценарий НПО им. С. А. Лавочкина
16-18 марта 2010 “Техническое зрение в
Слайд 8Системы координат Фобоса
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010”
Системы координат Фобоса
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010”

Слайд 9Расположение камер на КА
8
16-18 марта 2010 “Техническое зрение в системах управления мобильными
Расположение камер на КА
8
16-18 марта 2010 “Техническое зрение в системах управления мобильными

Слайд 10Стереорежим
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса -
Стереорежим
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса -
Слайд 11Стереорежим
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса -
Стереорежим
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса -
Слайд 12Стереорежим. Влияние разброса диспарантности 0.05
16-18 марта 2010 “Техническое зрение в системах управления
Стереорежим. Влияние разброса диспарантности 0.05
16-18 марта 2010 “Техническое зрение в системах управления
Слайд 13Стереорежим. Влияние разброса диспарантности 0.1
16-18 марта 2010 “Техническое зрение в системах управления
Стереорежим. Влияние разброса диспарантности 0.1
16-18 марта 2010 “Техническое зрение в системах управления
Слайд 14Стереорежим
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса -
Стереорежим
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса -
Слайд 15Монокулярный режим
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса
Монокулярный режим
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса
Слайд 16Монокулярный режим
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса
Монокулярный режим
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса
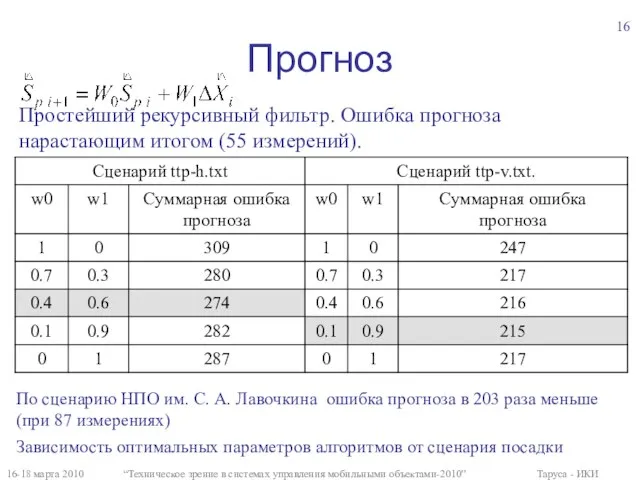
Слайд 17Прогноз
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса -
Прогноз
16-18 марта 2010 “Техническое зрение в системах управления мобильными объектами-2010” Таруса -
 Деятельность. Лекция №2
Деятельность. Лекция №2 Танец тени. Такие разные Я
Танец тени. Такие разные Я Иванова Варвара Александровна
Иванова Варвара Александровна Сочи: Вчера. Сегодня. Завтра. (Симметрия в архитектуре)
Сочи: Вчера. Сегодня. Завтра. (Симметрия в архитектуре) Поведенческие теории 2
Поведенческие теории 2 Виды случайных событий
Виды случайных событий ВИРТУАЛЬНОЕ МОДЕЛИРОВАНИЕ ТРЕХМЕРНЫХ СЦЕН
ВИРТУАЛЬНОЕ МОДЕЛИРОВАНИЕ ТРЕХМЕРНЫХ СЦЕН Таможенное право. Лекция 1
Таможенное право. Лекция 1 ВКР: сравнительный анализ рефлексии у студентов различных направлений подготовки
ВКР: сравнительный анализ рефлексии у студентов различных направлений подготовки 1832__
1832__ Урок – ПРЕЗЕНТАЦИЯ по геометрии в 9? классе.
Урок – ПРЕЗЕНТАЦИЯ по геометрии в 9? классе. Самореализующееся пророчество (Эффект Розенталя)
Самореализующееся пророчество (Эффект Розенталя) Психологические особенности ответственности и личностной тревожности молодых людей
Психологические особенности ответственности и личностной тревожности молодых людей Тормозной путь автомобиля
Тормозной путь автомобиля Возможные макрофизические проявления гипотетического нейтринного заряда.
Возможные макрофизические проявления гипотетического нейтринного заряда. Практические инструменты маркетинга в бизнесе
Практические инструменты маркетинга в бизнесе Избирательная система
Избирательная система Использование вихревого эффекта в зерновой промышленности
Использование вихревого эффекта в зерновой промышленности "ВВЕДЕНИЕ В ИНФОРМАТИКУ"
"ВВЕДЕНИЕ В ИНФОРМАТИКУ" РАБОТА С ИЗДАТЕЛЬСТВАМИ. АССОРТИМЕНТ ПЕРИОДИЧЕСКИХ ИЗДАНИЙ. КОНТРОЛЬ ПРОДАЖ. ВОЗВРАТ НЕРЕАЛИЗОВАННЫХ ЭКЗЕМПЛЯРОВ.
РАБОТА С ИЗДАТЕЛЬСТВАМИ. АССОРТИМЕНТ ПЕРИОДИЧЕСКИХ ИЗДАНИЙ. КОНТРОЛЬ ПРОДАЖ. ВОЗВРАТ НЕРЕАЛИЗОВАННЫХ ЭКЗЕМПЛЯРОВ. Зрительные иллюзии в одежде
Зрительные иллюзии в одежде Картины исторические и бытовые
Картины исторические и бытовые Презентация на тему Угол поворота. Радианная мера угла
Презентация на тему Угол поворота. Радианная мера угла Выполнил: Котов О.Ю 5 курс, 4.1 группа Ставрополь 2010. - презентация
Выполнил: Котов О.Ю 5 курс, 4.1 группа Ставрополь 2010. - презентация Основы Технологического Бизнеса.
Основы Технологического Бизнеса. X Международная научно-практическая конференция Молодежь и будущее: профессиональная и личностная самореализация
X Международная научно-практическая конференция Молодежь и будущее: профессиональная и личностная самореализация Пищевые улучшители и добавки
Пищевые улучшители и добавки ДЕЕПРИЧАСТИЕ КАК ЧАСТЬ РЕЧИ
ДЕЕПРИЧАСТИЕ КАК ЧАСТЬ РЕЧИ