Громыко Алексей Олегович Компьютерное моделирование кинематики манипулятора промышленного робота Руководитель: доктор физ.-м
- Громыко Алексей Олегович Компьютерное моделирование кинематики манипулятора промышленного робота Руководитель: доктор физ.-м

Содержание
- 2. Содержание Актуальность. Поставленные цели. Объект и предмет исследования. Научная гипотеза. Основные результаты. Научная новизна. Положения, выносимые
- 3. Актуальность Одними из важнейших проблем современного моделирования являются задачи робототехники. Создание эффективных методов, моделей и алгоритмов
- 4. Поставленные цели математическое описание роботов разработка математического моделирования обоснование и формулирование критериев качества, в том числе
- 5. Объект и предмет исследования Объектом исследования выступает моделирование кинематики манипулятора промышленного робота в пакетах Adams и
- 6. Научная гипотеза Задана кинематическая схема манипулятора и в некоторый момент времени известны значения обобщенных координат, определяющие
- 7. Основные результаты Решение прямой задачи кинематики сводится к тому, что, задавшись значениями обобщенных координат, вычисляются элементы
- 8. Основные результаты Результатом настоящей работы стала разработка модели кинематики манипулятора робота в пакетах ADAMS и VisualNastran
- 9. Модель манипулятора в Adams Начальное положение манипулятора Конечное положение манипулятора
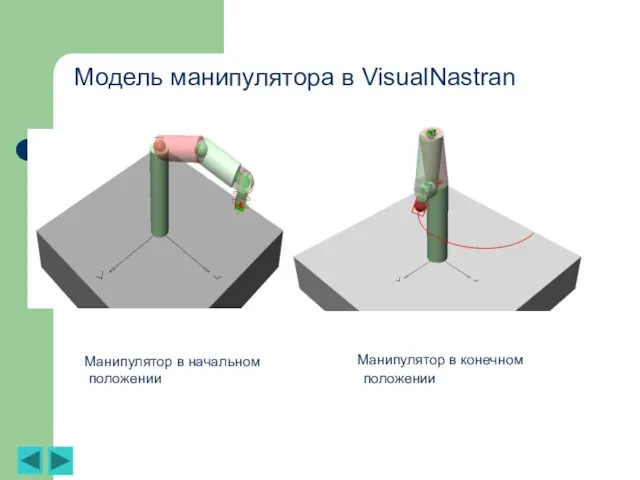
- 10. Модель манипулятора в VisualNastran Манипулятор в начальном положении Манипулятор в конечном положении
- 11. Научная новизна построены компьютерные модели манипулятора промышленного робота в пакетах VisualNastran и Adams исследованы кинематические характеристики
- 12. Основные положения, выносимые на защиту математическое описание роботов разработка математического моделей кинематики манипулятора робота построение программных
- 14. Скачать презентацию
Слайд 2Содержание
Актуальность.
Поставленные цели.
Объект и предмет исследования.
Научная гипотеза.
Основные результаты.
Научная новизна.
Положения, выносимые на защиту.
Содержание
Актуальность.
Поставленные цели.
Объект и предмет исследования.
Научная гипотеза.
Основные результаты.
Научная новизна.
Положения, выносимые на защиту.
Слайд 3Актуальность
Одними из важнейших проблем современного моделирования являются задачи робототехники. Создание эффективных методов,
Актуальность
Одними из важнейших проблем современного моделирования являются задачи робототехники. Создание эффективных методов,
Слайд 4Поставленные цели
математическое описание роботов
разработка математического моделирования
обоснование и формулирование критериев качества, в
Поставленные цели
математическое описание роботов
разработка математического моделирования
обоснование и формулирование критериев качества, в
Слайд 5Объект и предмет исследования
Объектом исследования выступает моделирование кинематики манипулятора промышленного робота в
Объект и предмет исследования
Объектом исследования выступает моделирование кинематики манипулятора промышленного робота в
Слайд 6Научная гипотеза
Задана кинематическая схема манипулятора и в некоторый момент времени известны значения
Научная гипотеза
Задана кинематическая схема манипулятора и в некоторый момент времени известны значения
Слайд 7Основные результаты
Решение прямой задачи кинематики сводится к тому, что, задавшись значениями обобщенных
Основные результаты
Решение прямой задачи кинематики сводится к тому, что, задавшись значениями обобщенных
Слайд 8Основные результаты
Результатом настоящей работы стала
разработка модели кинематики манипулятора робота в пакетах ADAMS
Основные результаты
Результатом настоящей работы стала
разработка модели кинематики манипулятора робота в пакетах ADAMS
Слайд 9Модель манипулятора в Adams
Начальное положение манипулятора
Конечное положение манипулятора
Модель манипулятора в Adams
Начальное положение манипулятора
Конечное положение манипулятора

Слайд 10Модель манипулятора в VisualNastran
Манипулятор в начальном положении
Манипулятор в
Модель манипулятора в VisualNastran
Манипулятор в начальном положении
Манипулятор в
Слайд 11Научная новизна
построены компьютерные модели манипулятора промышленного робота в пакетах VisualNastran и Adams
исследованы
Научная новизна
построены компьютерные модели манипулятора промышленного робота в пакетах VisualNastran и Adams
исследованы
Слайд 12Основные положения, выносимые на защиту
математическое описание роботов
разработка математического моделей кинематики манипулятора
Основные положения, выносимые на защиту
математическое описание роботов
разработка математического моделей кинематики манипулятора
 Система управления дистанционным обучением
Система управления дистанционным обучением Разноцветные краски. 1 класс
Разноцветные краски. 1 класс Степень обобщенности значений. Место семантических единиц на оси обобщенности
Степень обобщенности значений. Место семантических единиц на оси обобщенности Тема урока: «Классификация профессий по целям труда, по орудиям и условиям труда»
Тема урока: «Классификация профессий по целям труда, по орудиям и условиям труда» Закон и ответственность
Закон и ответственность Любить, мечтать и верить
Любить, мечтать и верить ТУЛА - ГОРОД МЕЧТА
ТУЛА - ГОРОД МЕЧТА Электрическое поле 8 класс
Электрическое поле 8 класс Министерство образования и науки РФ Фурсенко А.А., зам министра Биленкина И.П.
Министерство образования и науки РФ Фурсенко А.А., зам министра Биленкина И.П.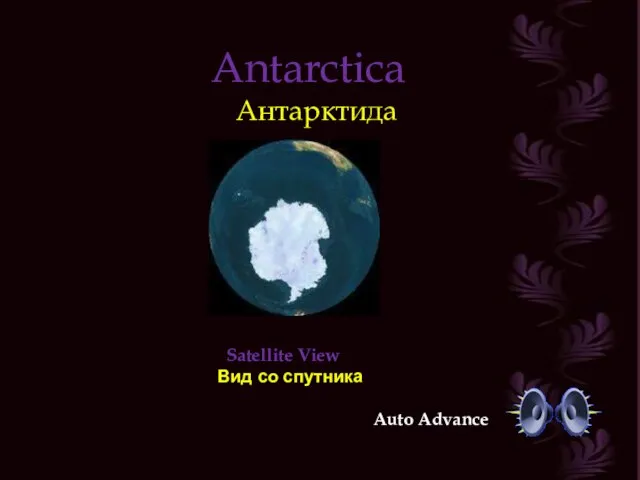 Презентация по английскому Антарктида
Презентация по английскому Антарктида Дизайн - проект развивающей среды в младшей группе "Теремок"
Дизайн - проект развивающей среды в младшей группе "Теремок" Работа в методических проектах как эффективная форма повышения педагогического мастерства
Работа в методических проектах как эффективная форма повышения педагогического мастерства Услуги современной кадровой индустрии
Услуги современной кадровой индустрии Палестина. Религиозно-нравственное состояние еврейского народа перед Рождеством Христовым
Палестина. Религиозно-нравственное состояние еврейского народа перед Рождеством Христовым Центр повышения квалификации профессорско-преподавательского состава
Центр повышения квалификации профессорско-преподавательского состава The culture of ancient japan
The culture of ancient japan Вышивка крестом
Вышивка крестом Física. Pautas 2do cuatrimestre 2021
Física. Pautas 2do cuatrimestre 2021 Презентация на тему Изобразительное искусство (9 класс)
Презентация на тему Изобразительное искусство (9 класс) Автоматизация HR-процессов
Автоматизация HR-процессов Роль цвета в произведении М.Ю. Лермонтова «Песня про купца Калашникова …»
Роль цвета в произведении М.Ю. Лермонтова «Песня про купца Калашникова …» Презентация на тему Алгебраические дроби сложение и вычитание алгебраических дробей с одинаковыми знаменателями
Презентация на тему Алгебраические дроби сложение и вычитание алгебраических дробей с одинаковыми знаменателями  БЕЗОПАСНОСТЬ– ПРОИЗВОДИТЕЛЬНОСТЬ– ТОЧНОСТЬ:
БЕЗОПАСНОСТЬ– ПРОИЗВОДИТЕЛЬНОСТЬ– ТОЧНОСТЬ: Средняя линия трапеции
Средняя линия трапеции СУОЯРВСКИЙ РАЙОН
СУОЯРВСКИЙ РАЙОН Культура России 4 класс
Культура России 4 класс Административно-бытовой корпус в г. Дюртюли
Административно-бытовой корпус в г. Дюртюли История искусств
История искусств