- Автоматическое вождение

Содержание
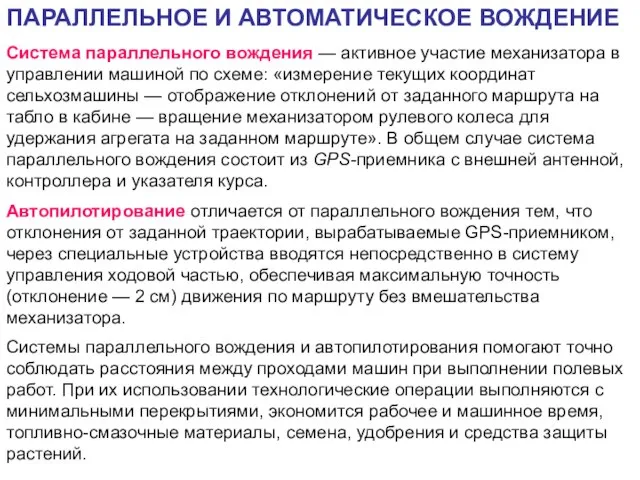
- 2. Система параллельного вождения — активное участие механизатора в управлении машиной по схеме: «измерение текущих координат сельхозмашины
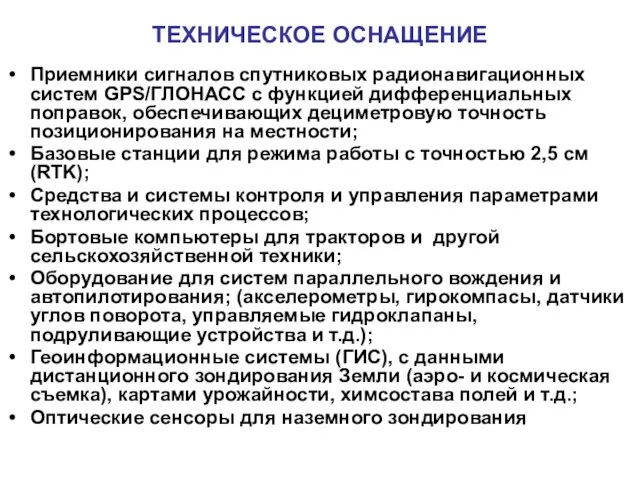
- 3. Приемники сигналов спутниковых радионавигационных систем GPS/ГЛОНАСС с функцией дифференциальных поправок, обеспечивающих дециметровую точность позиционирования на местности;
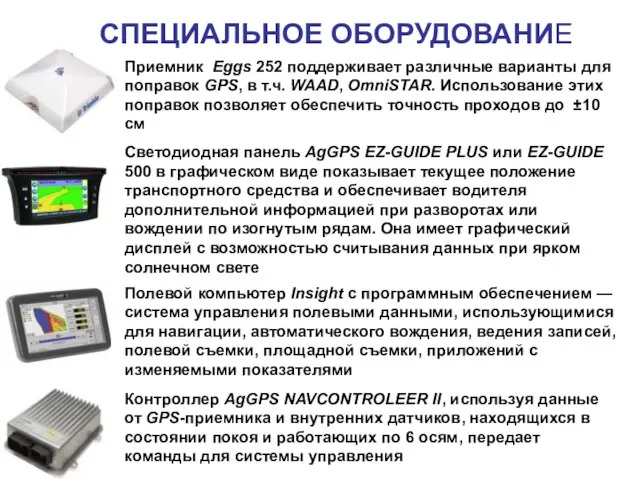
- 4. Приемник Eggs 252 поддерживает различные варианты для поправок GPS, в т.ч. WAAD, OmniSTAR. Использование этих поправок
- 5. Датчик угла поворота колес предназначен для непрерывной обратной связи с системой управления трактором Управляющий гидравлический клапан
- 6. Стандартные компоненты системы
- 7. РАЗМЕЩЕНИЕ ОБОРУДОВАНИЯ НА ТРАКТОРЕ
- 8. ПРИНЦИП ПАРАЛЛЕЛЬНОГО ВОЖДЕНИЯ
- 9. ВОЗМОЖНЫЕ ТРАЕКТОРИИ ДВИЖЕНИЯ АГРЕГАТОВ (рисунок с сайта http://www.geomir.ru/ag_navigation_ru)
- 10. (рисунок с сайта http://www.geomir.ru/ag_navigation_ru) КОНФИГУРАЦИЯ ПОЛЕЙ, ОБРАБОТАННЫХ С ПОМОЩЬЮ НАВИГАЦИОННЫХ СИСТЕМ ПАРАЛЛЕЛЬНОГО ВОЖДЕНИЯ
- 11. ИСПОЛЬЗОВАНИЕ АВТОПИЛОТА В НОЧНОЕ ВРЕМЯ
- 12. ПОСАДКА КАРТОФЕЛЯ НА СКЛОНЕ С ИСПОЛЬЗОВАНИЕМ СИСТЕМЫ «АВТОПИЛОТ»
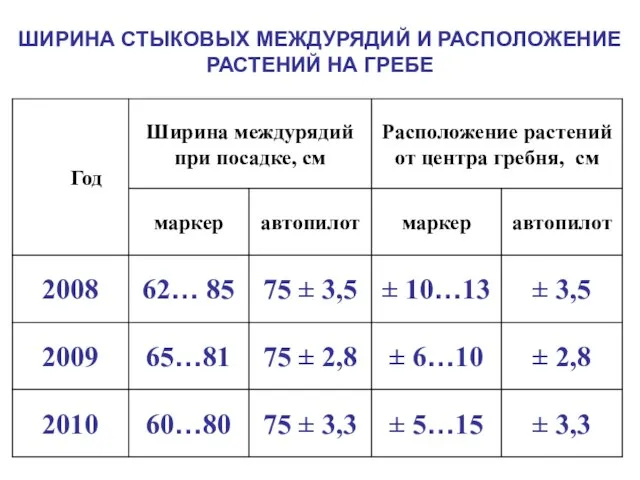
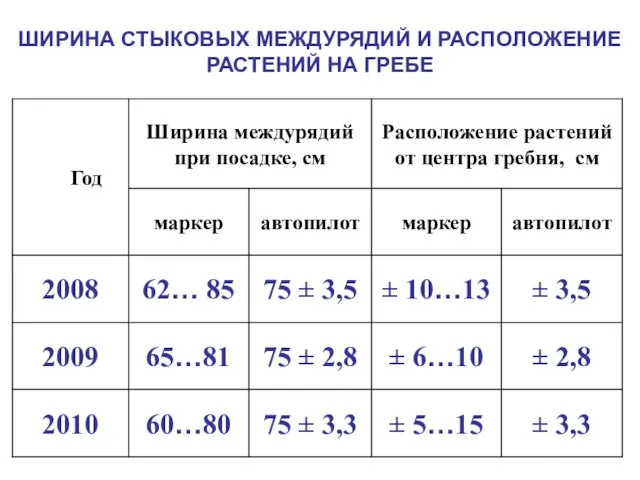
- 13. ШИРИНА СТЫКОВЫХ МЕЖДУРЯДИЙ И РАСПОЛОЖЕНИЕ РАСТЕНИЙ НА ГРЕБЕ
- 14. ГРЕБНЕОБРАЗОВАНИЕ С ИСПОЛЬЗОВАНИЕМ СИСТЕМЫ «АВТОПИЛОТ» Посев (посадка) зерновых, кормовых культур и картофеля по автопилоту обеспечивает качественное
- 15. ВСХОДЫ КАРТОФЕЛЯ (ПОСЛЕ ПОСАДКИ И ГРЕБНЕОБРАЗОВАНИЯ ПО «АВТОПИЛОТУ»)
- 16. Частота встречаемости (%) отклонений растений картофеля от центра гребня
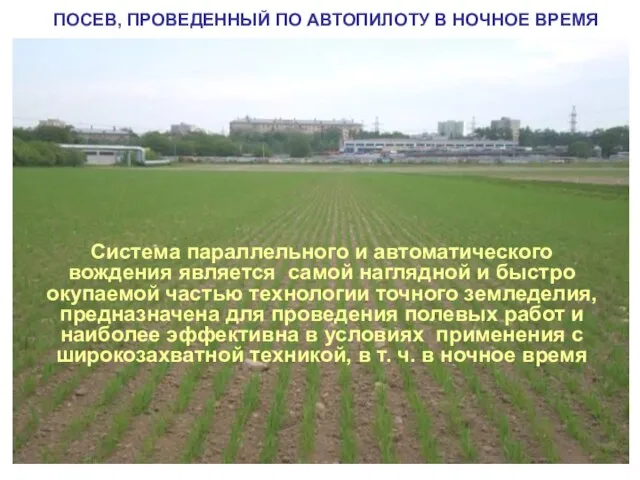
- 17. ПОСЕВ, ПРОВЕДЕННЫЙ ПО АВТОПИЛОТУ В НОЧНОЕ ВРЕМЯ Система параллельного и автоматического вождения является самой наглядной и
- 18. ШИРИНА СТЫКОВЫХ МЕЖДУРЯДИЙ И РАСПОЛОЖЕНИЕ РАСТЕНИЙ НА ГРЕБЕ
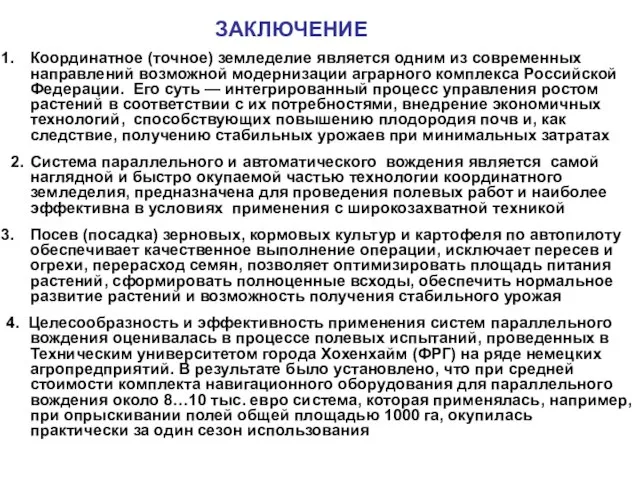
- 20. Координатное (точное) земледелие является одним из современных направлений возможной модернизации аграрного комплекса Российской Федерации. Его суть
- 22. Скачать презентацию
Слайд 2Система параллельного вождения — активное участие механизатора в управлении машиной по схеме:
Система параллельного вождения — активное участие механизатора в управлении машиной по схеме:
Слайд 3Приемники сигналов спутниковых радионавигационных систем GPS/ГЛОНАСС с функцией дифференциальных поправок, обеспечивающих дециметровую
Приемники сигналов спутниковых радионавигационных систем GPS/ГЛОНАСС с функцией дифференциальных поправок, обеспечивающих дециметровую
Слайд 4Приемник Eggs 252 поддерживает различные варианты для поправок GPS, в т.ч. WAAD,
Приемник Eggs 252 поддерживает различные варианты для поправок GPS, в т.ч. WAAD,
Слайд 5
Датчик угла поворота колес предназначен для непрерывной обратной связи с системой управления
Датчик угла поворота колес предназначен для непрерывной обратной связи с системой управления

Слайд 6Стандартные компоненты системы
Стандартные компоненты системы

Слайд 7РАЗМЕЩЕНИЕ ОБОРУДОВАНИЯ НА ТРАКТОРЕ
РАЗМЕЩЕНИЕ ОБОРУДОВАНИЯ НА ТРАКТОРЕ

Слайд 8ПРИНЦИП ПАРАЛЛЕЛЬНОГО ВОЖДЕНИЯ
ПРИНЦИП ПАРАЛЛЕЛЬНОГО ВОЖДЕНИЯ

Слайд 9
ВОЗМОЖНЫЕ ТРАЕКТОРИИ ДВИЖЕНИЯ АГРЕГАТОВ
(рисунок с сайта http://www.geomir.ru/ag_navigation_ru)
ВОЗМОЖНЫЕ ТРАЕКТОРИИ ДВИЖЕНИЯ АГРЕГАТОВ
(рисунок с сайта http://www.geomir.ru/ag_navigation_ru)

Слайд 10(рисунок с сайта http://www.geomir.ru/ag_navigation_ru)
КОНФИГУРАЦИЯ ПОЛЕЙ, ОБРАБОТАННЫХ С ПОМОЩЬЮ НАВИГАЦИОННЫХ СИСТЕМ ПАРАЛЛЕЛЬНОГО ВОЖДЕНИЯ
(рисунок с сайта http://www.geomir.ru/ag_navigation_ru)
КОНФИГУРАЦИЯ ПОЛЕЙ, ОБРАБОТАННЫХ С ПОМОЩЬЮ НАВИГАЦИОННЫХ СИСТЕМ ПАРАЛЛЕЛЬНОГО ВОЖДЕНИЯ

Слайд 11ИСПОЛЬЗОВАНИЕ АВТОПИЛОТА В НОЧНОЕ ВРЕМЯ
ИСПОЛЬЗОВАНИЕ АВТОПИЛОТА В НОЧНОЕ ВРЕМЯ

Слайд 12ПОСАДКА КАРТОФЕЛЯ НА СКЛОНЕ С ИСПОЛЬЗОВАНИЕМ СИСТЕМЫ «АВТОПИЛОТ»
ПОСАДКА КАРТОФЕЛЯ НА СКЛОНЕ С ИСПОЛЬЗОВАНИЕМ СИСТЕМЫ «АВТОПИЛОТ»

Слайд 13ШИРИНА СТЫКОВЫХ МЕЖДУРЯДИЙ И РАСПОЛОЖЕНИЕ РАСТЕНИЙ НА ГРЕБЕ
ШИРИНА СТЫКОВЫХ МЕЖДУРЯДИЙ И РАСПОЛОЖЕНИЕ РАСТЕНИЙ НА ГРЕБЕ
Слайд 14ГРЕБНЕОБРАЗОВАНИЕ С ИСПОЛЬЗОВАНИЕМ
СИСТЕМЫ «АВТОПИЛОТ»
Посев (посадка) зерновых, кормовых культур и картофеля по
ГРЕБНЕОБРАЗОВАНИЕ С ИСПОЛЬЗОВАНИЕМ
СИСТЕМЫ «АВТОПИЛОТ»
Посев (посадка) зерновых, кормовых культур и картофеля по

Слайд 15ВСХОДЫ КАРТОФЕЛЯ
(ПОСЛЕ ПОСАДКИ И ГРЕБНЕОБРАЗОВАНИЯ ПО «АВТОПИЛОТУ»)
ВСХОДЫ КАРТОФЕЛЯ
(ПОСЛЕ ПОСАДКИ И ГРЕБНЕОБРАЗОВАНИЯ ПО «АВТОПИЛОТУ»)

Слайд 16Частота встречаемости (%) отклонений растений картофеля от центра гребня
Частота встречаемости (%) отклонений растений картофеля от центра гребня

Слайд 17ПОСЕВ, ПРОВЕДЕННЫЙ ПО АВТОПИЛОТУ В НОЧНОЕ ВРЕМЯ
Система параллельного и автоматического вождения является
ПОСЕВ, ПРОВЕДЕННЫЙ ПО АВТОПИЛОТУ В НОЧНОЕ ВРЕМЯ
Система параллельного и автоматического вождения является
Слайд 18ШИРИНА СТЫКОВЫХ МЕЖДУРЯДИЙ И РАСПОЛОЖЕНИЕ РАСТЕНИЙ НА ГРЕБЕ
ШИРИНА СТЫКОВЫХ МЕЖДУРЯДИЙ И РАСПОЛОЖЕНИЕ РАСТЕНИЙ НА ГРЕБЕ

Слайд 20Координатное (точное) земледелие является одним из современных направлений возможной модернизации аграрного комплекса
Координатное (точное) земледелие является одним из современных направлений возможной модернизации аграрного комплекса
 СРЕДНЯЯ ОБЩЕОБРАЗОВАТЕЛЬНАЯ ШКОЛА № 14 г. Томска
СРЕДНЯЯ ОБЩЕОБРАЗОВАТЕЛЬНАЯ ШКОЛА № 14 г. Томска Русская культура в произведениях русских классиков. Кухня
Русская культура в произведениях русских классиков. Кухня Чистая монополия
Чистая монополия Псалом 1
Псалом 1 Сонная болезнь
Сонная болезнь Птицы леса
Птицы леса КАДРОВЫЙ КОНСАЛТИНГ
КАДРОВЫЙ КОНСАЛТИНГ Гербы стран
Гербы стран Міністерство освіти і науки України Управління освіти і науки Волинської обласної державної адміністрації Професійно – технічне
Міністерство освіти і науки України Управління освіти і науки Волинської обласної державної адміністрації Професійно – технічне Shopping
Shopping Сильные и слабые стороны государственно-общественного управления
Сильные и слабые стороны государственно-общественного управления Бюджет для граждан к проекту закона об исполнении бюджета за 2019 год
Бюджет для граждан к проекту закона об исполнении бюджета за 2019 год Кибербуллинг
Кибербуллинг Улучшая качество повседневной жизни В нашем беспокойном, стрессовом и суетливом мире потребители уделяют огромное внимание качес
Улучшая качество повседневной жизни В нашем беспокойном, стрессовом и суетливом мире потребители уделяют огромное внимание качес DER VOGEL
DER VOGEL dollar
dollar Радиация, ее влияние на организм человека
Радиация, ее влияние на организм человека Методы тренировки мышц кистей и предплечий в гиревом спорте
Методы тренировки мышц кистей и предплечий в гиревом спорте 36 лет спустя. Школьные годы чудесные
36 лет спустя. Школьные годы чудесные «Нокдаун»
«Нокдаун»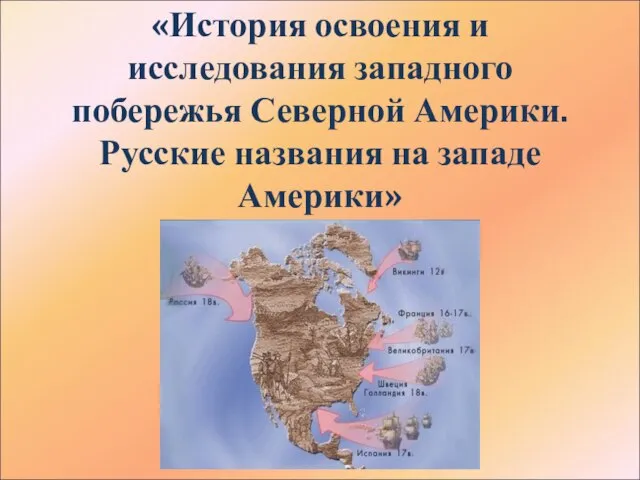 История освоения и исследования западного побережья Северной Америки. Русские названия на западе Америки
История освоения и исследования западного побережья Северной Америки. Русские названия на западе Америки Острые углы сложноподчиненного предложения
Острые углы сложноподчиненного предложения Республиканская целевая программа
Республиканская целевая программа Презентация на тему Геометрия вокруг нас
Презентация на тему Геометрия вокруг нас  УСЛУГИ РЫНКА ТРУДА Eesti Tootukassa
УСЛУГИ РЫНКА ТРУДА Eesti Tootukassa Осязание
Осязание Comments
Comments Повышение пенсионного возраста
Повышение пенсионного возраста