- Автоматизированное управление дорожным движением (светофорами)

Содержание
- 2. Введение Историческая справка и некоторые факты. Причины возникновения заторов: Неудовлетворительное, или не соответствующее текущим потребностям устройство
- 3. Постановка задачи Смоделировать движение автомобилей в отдельно взятой части мегаполиса. Разработать различные алгоритмы управления светофорами. Сравнить
- 4. Модели дорожного движения Макромодели гидродинамические модели; модели, основанные на кинетическом уравнении. Микромодели: модель оптимальной скорости; модель
- 5. Некоторые допущения Каждый перегон имеет ровно две полосы для движения. Движение правостороннее. С левой полосы на
- 6. Моделирование движения Автоматизированное управление дорожным движением 6/14 Бычков Алексей Сергеевич А-13-08 Точка входа-выхода автомобиля. Автомобиль. Перекресток.
- 7. Алгоритмы переключения светофоров Автоматизированное управление дорожным движением 7/14 Бычков Алексей Сергеевич А-13-08 В данной работе рассмотрены
- 8. Равномерное переключение Автоматизированное управление дорожным движением 8/14 Бычков Алексей Сергеевич А-13-08 Равномерное переключение:
- 9. Переключение в зависимости от очереди Автоматизированное управление дорожным движением 9/14 Бычков Алексей Сергеевич А-13-08 Переключение в
- 10. Инфраструктуры и критерии сравнения Автоматизированное управление дорожным движением 10/14 Бычков Алексей Сергеевич А-13-08 Инфраструктуры Критерии сравнения:
- 11. Одиночный перекресток Автоматизированное управление дорожным движением 11/14 Бычков Алексей Сергеевич А-13-08 Разные вероятности генерации автомобилей p1=0.45,
- 12. Квартал из четырех перекрестков Автоматизированное управление дорожным движением 12/14 Бычков Алексей Сергеевич А-13-08 Разные вероятности генерации
- 13. Сложная городская схема Автоматизированное управление дорожным движением 13/14 Бычков Алексей Сергеевич А-13-08 Случай уже существующих очередей.
- 15. Скачать презентацию
Слайд 2Введение
Историческая справка и некоторые факты.
Причины возникновения заторов:
Неудовлетворительное, или не соответствующее текущим потребностям
Введение
Историческая справка и некоторые факты.
Причины возникновения заторов:
Неудовлетворительное, или не соответствующее текущим потребностям
Слайд 3Постановка задачи
Смоделировать движение автомобилей в отдельно взятой части мегаполиса.
Разработать различные алгоритмы управления
Постановка задачи
Смоделировать движение автомобилей в отдельно взятой части мегаполиса.
Разработать различные алгоритмы управления
Слайд 4 Модели дорожного движения
Макромодели
гидродинамические модели;
модели, основанные на кинетическом уравнении.
Микромодели:
модель оптимальной скорости;
модель Видеманна;
модель
Модели дорожного движения
Макромодели
гидродинамические модели;
модели, основанные на кинетическом уравнении.
Микромодели:
модель оптимальной скорости;
модель Видеманна;
модель
Слайд 5Некоторые допущения
Каждый перегон имеет ровно две полосы для движения.
Движение правостороннее.
С левой полосы
Некоторые допущения
Каждый перегон имеет ровно две полосы для движения.
Движение правостороннее.
С левой полосы
Слайд 6Моделирование движения
Автоматизированное управление дорожным движением
6/14 Бычков Алексей Сергеевич А-13-08
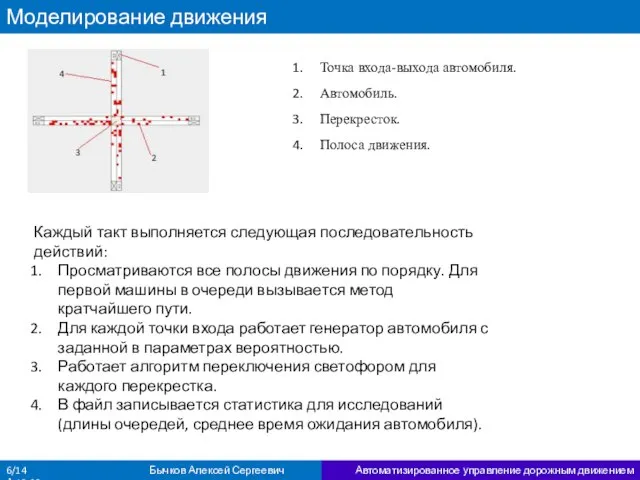
Точка входа-выхода автомобиля.
Автомобиль.
Перекресток.
Полоса движения.
Каждый
Моделирование движения
Автоматизированное управление дорожным движением
6/14 Бычков Алексей Сергеевич А-13-08
Точка входа-выхода автомобиля.
Автомобиль.
Перекресток.
Полоса движения.
Каждый
Слайд 7Алгоритмы переключения светофоров
Автоматизированное управление дорожным движением
7/14 Бычков Алексей Сергеевич А-13-08
В данной работе
Алгоритмы переключения светофоров
Автоматизированное управление дорожным движением
7/14 Бычков Алексей Сергеевич А-13-08
В данной работе
Слайд 8Равномерное переключение
Автоматизированное управление дорожным движением
8/14 Бычков Алексей Сергеевич А-13-08
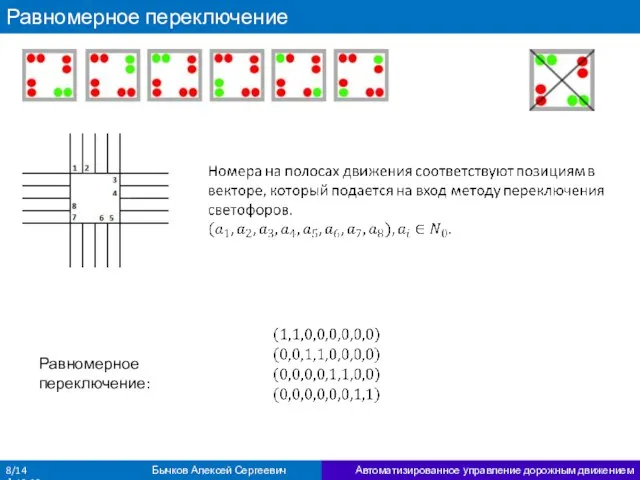
Равномерное переключение:
Равномерное переключение
Автоматизированное управление дорожным движением
8/14 Бычков Алексей Сергеевич А-13-08
Равномерное переключение:
Слайд 9Переключение в зависимости от очереди
Автоматизированное управление дорожным движением
9/14 Бычков Алексей Сергеевич А-13-08
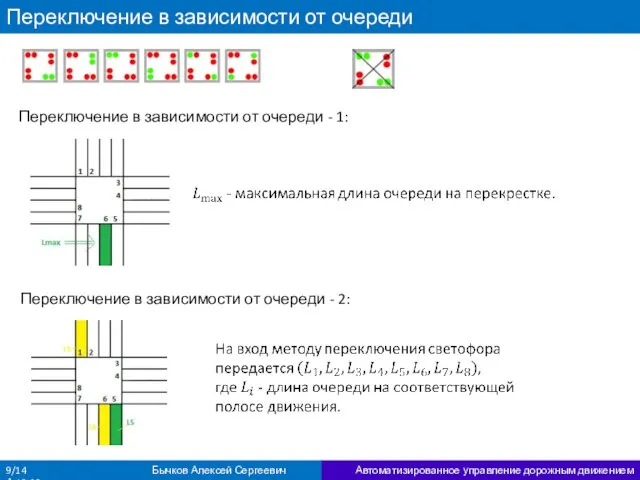
Переключение
Переключение в зависимости от очереди
Автоматизированное управление дорожным движением
9/14 Бычков Алексей Сергеевич А-13-08
Переключение
Слайд 10Инфраструктуры и критерии сравнения
Автоматизированное управление дорожным движением
10/14 Бычков Алексей Сергеевич А-13-08
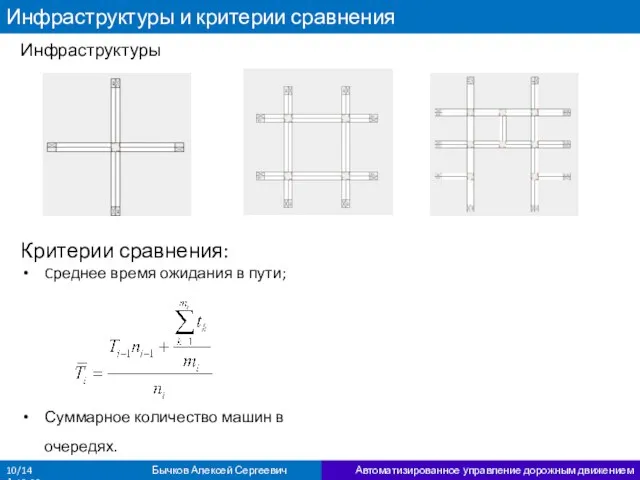
Инфраструктуры
Критерии сравнения:
Cреднее
Инфраструктуры и критерии сравнения
Автоматизированное управление дорожным движением
10/14 Бычков Алексей Сергеевич А-13-08
Инфраструктуры
Критерии сравнения:
Cреднее
Слайд 11Одиночный перекресток
Автоматизированное управление дорожным движением
11/14 Бычков Алексей Сергеевич А-13-08
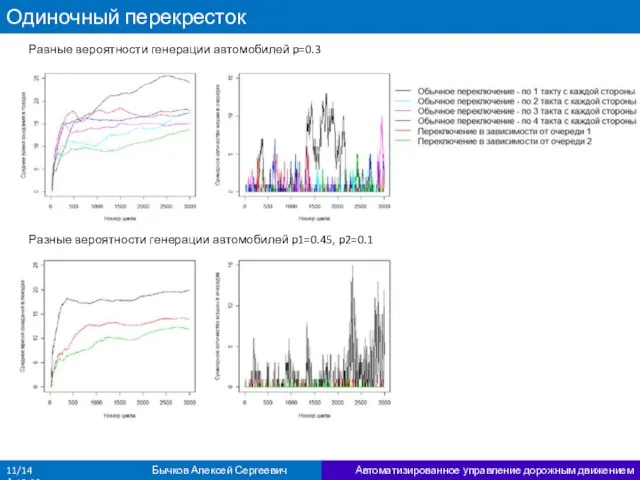
Разные вероятности генерации автомобилей
Одиночный перекресток
Автоматизированное управление дорожным движением
11/14 Бычков Алексей Сергеевич А-13-08
Разные вероятности генерации автомобилей
Слайд 12Квартал из четырех перекрестков
Автоматизированное управление дорожным движением
12/14 Бычков Алексей Сергеевич А-13-08
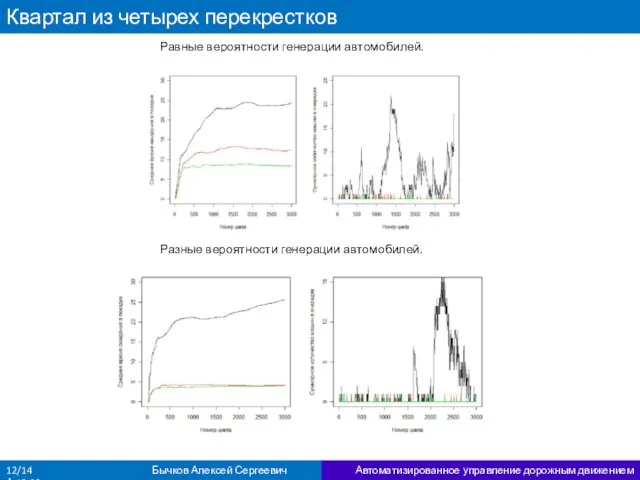
Разные вероятности
Квартал из четырех перекрестков
Автоматизированное управление дорожным движением
12/14 Бычков Алексей Сергеевич А-13-08
Разные вероятности
Слайд 13Сложная городская схема
Автоматизированное управление дорожным движением
13/14 Бычков Алексей Сергеевич А-13-08
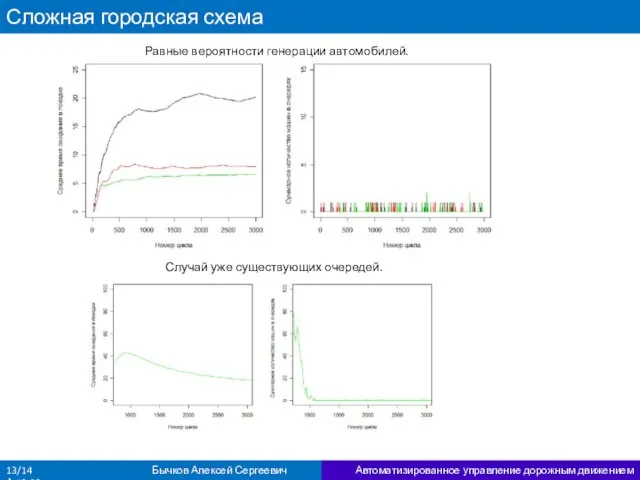
Случай уже существующих
Сложная городская схема
Автоматизированное управление дорожным движением
13/14 Бычков Алексей Сергеевич А-13-08
Случай уже существующих
 Net Школа Дневник вашего ребенка – в вашем сотовом телефоне.
Net Школа Дневник вашего ребенка – в вашем сотовом телефоне. Презентация на тему Рождественские обычаи
christmas customs and traditions
Презентация на тему Рождественские обычаи
christmas customs and traditions Солнечная энергетика (лекция № 7)
Солнечная энергетика (лекция № 7) Презентация на тему История утюга
Презентация на тему История утюга Числовые выражения
Числовые выражения 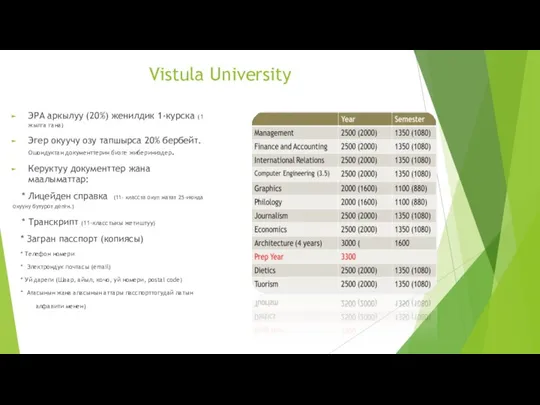 Vistula University
Vistula University Детское экспериментирование как средство развития познавательной активности дошкольников
Детское экспериментирование как средство развития познавательной активности дошкольников Поддержать, Подбодрить, Поднять самооценку школьника на ступеньку выше, Подстегнуть его интерес к знаниям, Подкрепить достигнутые
Поддержать, Подбодрить, Поднять самооценку школьника на ступеньку выше, Подстегнуть его интерес к знаниям, Подкрепить достигнутые Связи системы-организации с внешней средой
Связи системы-организации с внешней средой Металлы и сплавы
Металлы и сплавы Техника безопасности на занятиях гимнастикой. Основные группы мышц и способы их развития
Техника безопасности на занятиях гимнастикой. Основные группы мышц и способы их развития Слепые художники
Слепые художники Страховая группа АСК
Страховая группа АСК Пожары и условия их возникновения
Пожары и условия их возникновения Старинные русские меры длины
Старинные русские меры длины Презентация на тему Законы Менделя
Презентация на тему Законы Менделя  Издательство «Дрофа-Медиа»
Издательство «Дрофа-Медиа» Как мы провели это…
Как мы провели это… Бестарифная система оплаты труда
Бестарифная система оплаты труда Презентация на тему Тим Собакин
Презентация на тему Тим Собакин Никита Сергеевич Хрущев
Никита Сергеевич Хрущев слоны
слоны Централизованный биллинг. Централизация ЮЛ (расчеты ЭЭ) на базе Oracle CC&B и Оренбургского филиала ЭСБ+
Централизованный биллинг. Централизация ЮЛ (расчеты ЭЭ) на базе Oracle CC&B и Оренбургского филиала ЭСБ+ Левша Лескова
Левша Лескова Suchkova_Proekt_Kukhni_1
Suchkova_Proekt_Kukhni_1 A Brief Guide for Visitors to the Houses of Parliament
A Brief Guide for Visitors to the Houses of Parliament Презентация на тему Гоголь Ревизор
Презентация на тему Гоголь Ревизор  Бала құқығы туралы
Бала құқығы туралы