- Автономный робот-манипулятор

Содержание
- 2. Этапы разработки: Проектирование Разработка электроники 3D печать Сборка манипулятора
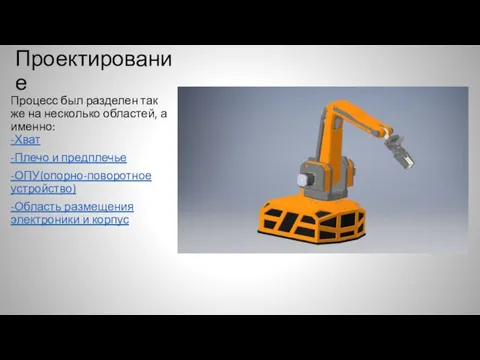
- 3. Проектирование Процесс был разделен так же на несколько областей, а именно: -Хват -Плечо и предплечье -ОПУ(опорно-поворотное
- 4. Проектирование хвата Хват выполнен таким образом, что губки двигаются поступательно (параллельно самим себе) В хвате находится
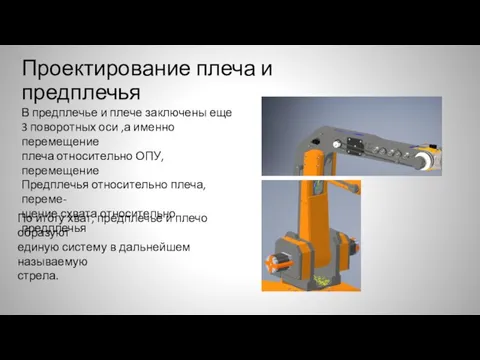
- 5. Проектирование плеча и предплечья В предплечье и плече заключены еще 3 поворотных оси ,а именно перемещение
- 6. Проектирование ОПУ(опорно-поворотного устройства) В ОПУ находится еще одна повортная ось, позволяющая манипулятору выполнять работу практически по
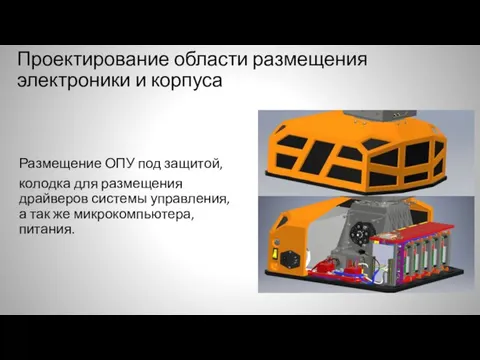
- 7. Проектирование области размещения электроники и корпуса Размещение ОПУ под защитой, колодка для размещения драйверов системы управления,
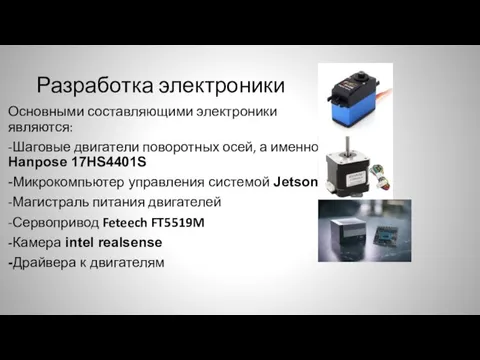
- 8. Разработка электроники Основными составляющими электроники являются: -Шаговые двигатели поворотных осей, а именно Hanpose 17HS4401S -Микрокомпьютер управления
- 9. Немного о магистрали питания драйверов
- 10. 3D печать комплектующих
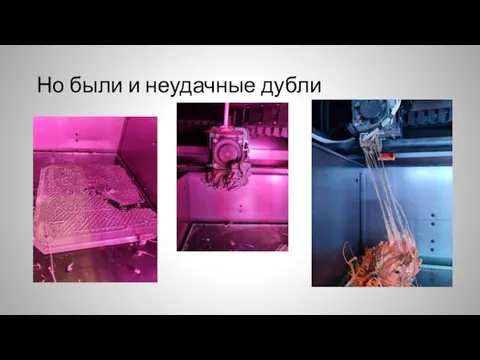
- 11. Но были и неудачные дубли
- 12. Сборка манипулятора
- 13. Некоторые расчеты ОПУ: Углы [-170°; +170°] Амплитуда = 340° Передаточное соотношение = 27.04*2.5 = 67.6 Плечо:
- 15. Скачать презентацию
Слайд 3Проектирование
Процесс был разделен так же на несколько областей, а именно:
-Хват
-Плечо и предплечье
-ОПУ(опорно-поворотное
Проектирование
Процесс был разделен так же на несколько областей, а именно:
-Хват
-Плечо и предплечье
-ОПУ(опорно-поворотное
Слайд 4Проектирование хвата
Хват выполнен таким образом,
что губки двигаются поступательно
(параллельно самим себе)
В хвате находится
Проектирование хвата
Хват выполнен таким образом,
что губки двигаются поступательно
(параллельно самим себе)
В хвате находится

Слайд 5Проектирование плеча и предплечья
В предплечье и плече заключены еще
3 поворотных оси
Проектирование плеча и предплечья
В предплечье и плече заключены еще
3 поворотных оси
Слайд 6Проектирование ОПУ(опорно-поворотного устройства)
В ОПУ находится еще одна повортная ось, позволяющая манипулятору выполнять
Проектирование ОПУ(опорно-поворотного устройства)
В ОПУ находится еще одна повортная ось, позволяющая манипулятору выполнять

Слайд 7Проектирование области размещения электроники и корпуса
Размещение ОПУ под защитой,
колодка для размещения
Проектирование области размещения электроники и корпуса
Размещение ОПУ под защитой,
колодка для размещения
Слайд 8Разработка электроники
Основными составляющими электроники являются:
-Шаговые двигатели поворотных осей, а именно Hanpose 17HS4401S
-Микрокомпьютер
Разработка электроники
Основными составляющими электроники являются:
-Шаговые двигатели поворотных осей, а именно Hanpose 17HS4401S
-Микрокомпьютер
Слайд 9Немного о магистрали питания драйверов
Немного о магистрали питания драйверов

Слайд 103D печать комплектующих
3D печать комплектующих

Слайд 11Но были и неудачные дубли
Но были и неудачные дубли
Слайд 12Сборка манипулятора
Сборка манипулятора

Слайд 13Некоторые расчеты
ОПУ: Углы [-170°; +170°]
Амплитуда = 340°
Передаточное соотношение = 27.04*2.5
Некоторые расчеты
ОПУ: Углы [-170°; +170°]
Амплитуда = 340°
Передаточное соотношение = 27.04*2.5
![Некоторые расчеты ОПУ: Углы [-170°; +170°] Амплитуда = 340° Передаточное соотношение =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/893230/slide-12.jpg)
 Презентация Шолпанбаев А
Презентация Шолпанбаев А Презентация на тему: Полиэтническая школа – пространство для диалога
Презентация на тему: Полиэтническая школа – пространство для диалога Столетняя война
Столетняя война  Операции по управлению персоналом
Операции по управлению персоналом Виктор Цой
Виктор Цой Организация деятельности социального педагога
Организация деятельности социального педагога ПЕРВОЕ АВИА-ТАКСИ В РОССИИ
ПЕРВОЕ АВИА-ТАКСИ В РОССИИ ПатисМакарунс – смесь для миндального печенья
ПатисМакарунс – смесь для миндального печенья Нация на презентации
Нация на презентации Интернет - инкубатор, как новая для России форма организации
Интернет - инкубатор, как новая для России форма организации Тест на знание дорожных знаков 2 класс
Тест на знание дорожных знаков 2 класс Основные этапы разработки моделей на компьютере
Основные этапы разработки моделей на компьютере Креативное сообщество IZONE
Креативное сообщество IZONE Мой город Краснодар
Мой город Краснодар Тема проекта:
Тема проекта: Работа психолога с воспитателями
Работа психолога с воспитателями Внеклассное мероприятие «Конкурс знатоковрусского языка »Учитель: Харченко С.Ю.
Внеклассное мероприятие «Конкурс знатоковрусского языка »Учитель: Харченко С.Ю. Основные механизмы реализации пилотного проекта по развитию общего образования города Москвы.
Основные механизмы реализации пилотного проекта по развитию общего образования города Москвы. СИСТЕМА ПОДАЧИ БУТЫЛОК РУЧНЫМ ДЕПАЛЛЕТИЗАТОРОМ
СИСТЕМА ПОДАЧИ БУТЫЛОК РУЧНЫМ ДЕПАЛЛЕТИЗАТОРОМ Что нам мешает стать женщиной-плюс
Что нам мешает стать женщиной-плюс ОРГАНИЗАЦИЯ ШКОЛЬНОГО ПИТАНИЯ
ОРГАНИЗАЦИЯ ШКОЛЬНОГО ПИТАНИЯ Атом мирный и военный
Атом мирный и военный Физическая культура
Физическая культура О планировании и представлении результатов работы РЦ
О планировании и представлении результатов работы РЦ Экономика и управление на предприятиях приборостроения
Экономика и управление на предприятиях приборостроения Стандартизация (цели, задачи, принципы, методы)
Стандартизация (цели, задачи, принципы, методы) БРЕСТСКАЯ КРЕПОСТЬ
БРЕСТСКАЯ КРЕПОСТЬ Кто и когда изобрел бумагу?
Кто и когда изобрел бумагу?