Бакалаврская работа на тему:Исследование системы слежения за фазой компоненты PILOT мультиплексированного навигационного сигнала
- Бакалаврская работа на тему:Исследование системы слежения за фазой компоненты PILOT мультиплексированного навигационного сигнала

Содержание
- 2. Постановка задачи В 2008 г. В РФ была принята «Концепция развития навигационных сигналов системы ГЛОНАСС», которая
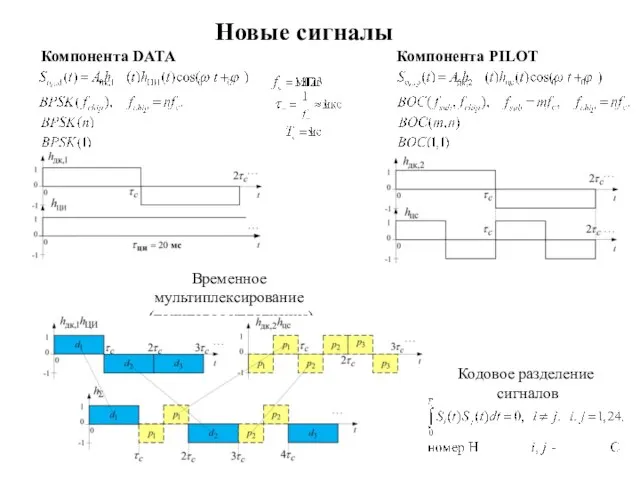
- 3. Новые сигналы Временное мультиплексирование (почиповое уплотнение) Компонента DATA Компонента PILOT Кодовое разделение сигналов
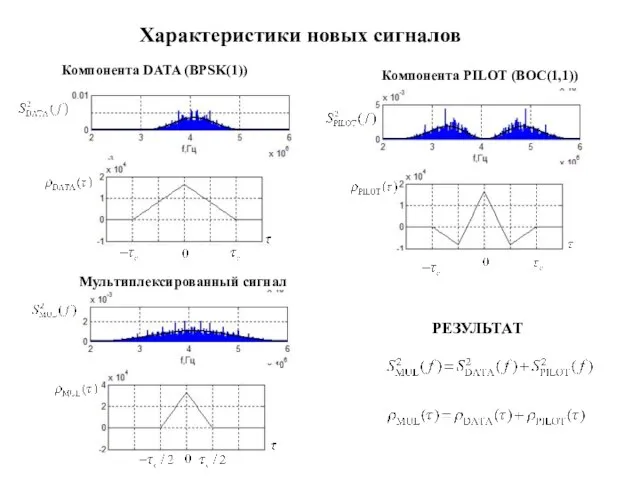
- 4. Характеристики новых сигналов Компонента DATA (BPSK(1)) Компонента PILOT (BOC(1,1)) Мультиплексированный сигнал РЕЗУЛЬТАТ
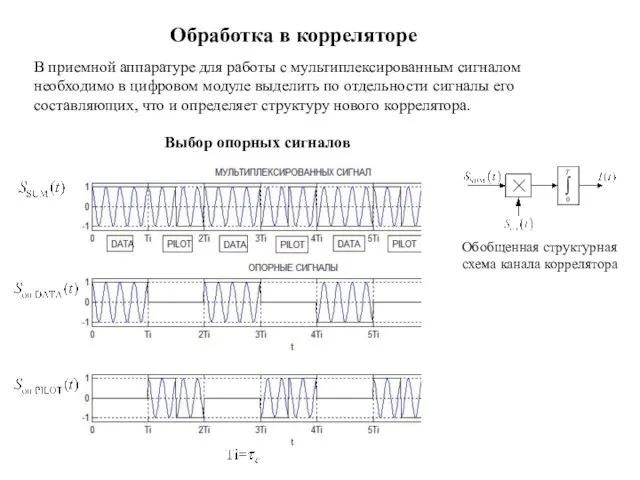
- 5. Обработка в корреляторе В приемной аппаратуре для работы с мультиплексированным сигналом необходимо в цифровом модуле выделить
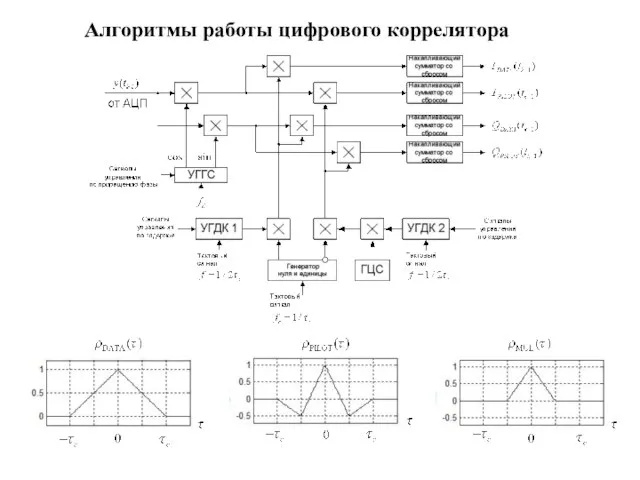
- 6. Алгоритмы работы цифрового коррелятора
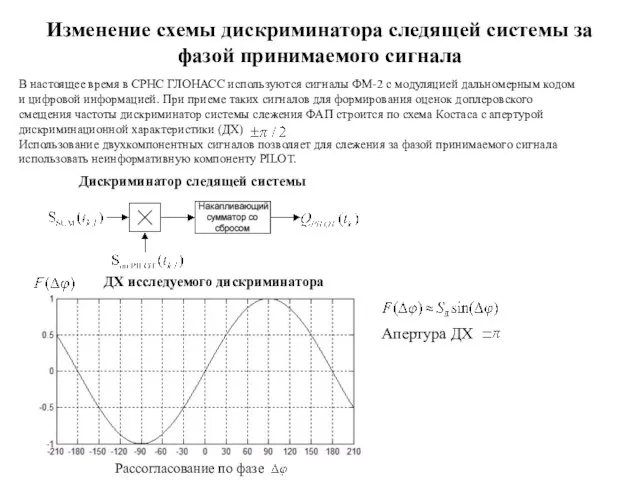
- 7. Изменение схемы дискриминатора следящей системы за фазой принимаемого сигнала Дискриминатор следящей системы ДХ исследуемого дискриминатора Рассогласование
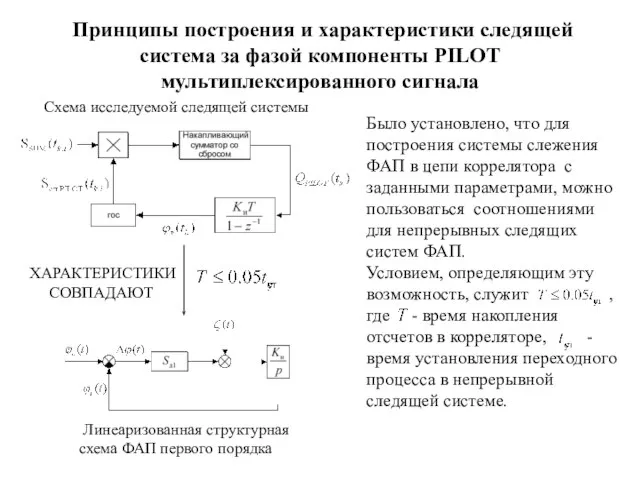
- 8. Принципы построения и характеристики следящей система за фазой компоненты PILOT мультиплексированного сигнала Схема исследуемой следящей системы
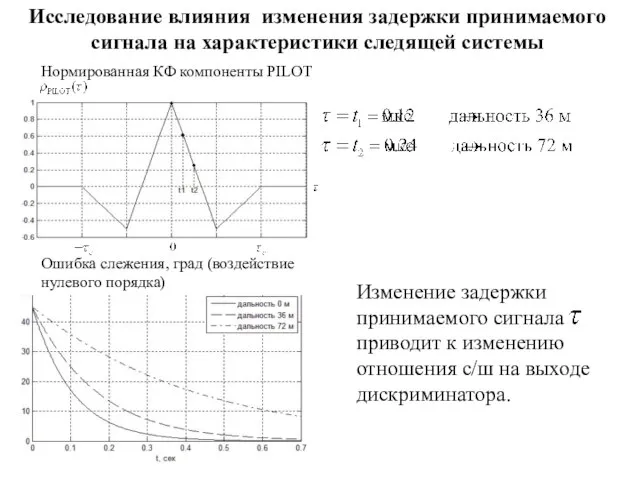
- 9. Ошибка слежения, град (воздействие нулевого порядка) Нормированная КФ компоненты PILOT Изменение задержки принимаемого сигнала приводит к
- 11. Скачать презентацию
Слайд 3Новые сигналы
Временное мультиплексирование
(почиповое уплотнение)
Компонента DATA
Компонента PILOT
Кодовое разделение
сигналов
Новые сигналы
Временное мультиплексирование
(почиповое уплотнение)
Компонента DATA
Компонента PILOT
Кодовое разделение
сигналов
Слайд 4Характеристики новых сигналов
Компонента DATA (BPSK(1))
Компонента PILOT (BOC(1,1))
Мультиплексированный сигнал
РЕЗУЛЬТАТ
Характеристики новых сигналов
Компонента DATA (BPSK(1))
Компонента PILOT (BOC(1,1))
Мультиплексированный сигнал
РЕЗУЛЬТАТ
Слайд 5Обработка в корреляторе
В приемной аппаратуре для работы с мультиплексированным сигналом необходимо в
Обработка в корреляторе
В приемной аппаратуре для работы с мультиплексированным сигналом необходимо в
Слайд 6Алгоритмы работы цифрового коррелятора
Алгоритмы работы цифрового коррелятора
Слайд 7Изменение схемы дискриминатора следящей системы за фазой принимаемого сигнала
Дискриминатор следящей системы
ДХ исследуемого
Изменение схемы дискриминатора следящей системы за фазой принимаемого сигнала
Дискриминатор следящей системы
ДХ исследуемого
Слайд 8 Принципы построения и характеристики следящей система за фазой компоненты PILOT мультиплексированного
Принципы построения и характеристики следящей система за фазой компоненты PILOT мультиплексированного
Слайд 9Ошибка слежения, град (воздействие нулевого порядка)
Нормированная КФ компоненты PILOT
Изменение задержки принимаемого сигнала
Ошибка слежения, град (воздействие нулевого порядка)
Нормированная КФ компоненты PILOT
Изменение задержки принимаемого сигнала
 Традиционные праздники Японии. День Совершеннолетия. Выполнила ученица 10 класса Василенко ЕкатеринаМАОУ «СОШ №31» Ве
Традиционные праздники Японии. День Совершеннолетия. Выполнила ученица 10 класса Василенко ЕкатеринаМАОУ «СОШ №31» Ве «СОЛНЫШКО» ЛЕТНИЙОЗДОРОВИТЕЛЬНЫЙ ЛАГЕРЬ
«СОЛНЫШКО» ЛЕТНИЙОЗДОРОВИТЕЛЬНЫЙ ЛАГЕРЬ Теплица ЦДОД г. Полярный
Теплица ЦДОД г. Полярный Лесная аптека
Лесная аптека 2 часть
2 часть Создание специальных образовательных условий в образовательной организации
Создание специальных образовательных условий в образовательной организации Консорциум «ЭНЕРГОКОМИНТЕХ»
Консорциум «ЭНЕРГОКОМИНТЕХ» Нормы трудового права. Тест
Нормы трудового права. Тест Российский парламентаризм
Российский парламентаризм Защита курсовой работы
Защита курсовой работы Девиантное поведение: причины, сущность, профилактика
Девиантное поведение: причины, сущность, профилактика МПСУ управляемыми выпрямителями
МПСУ управляемыми выпрямителями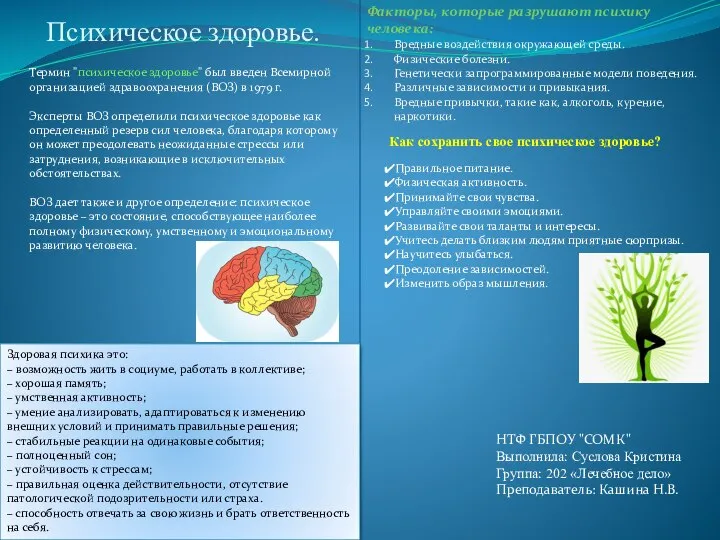 Психическое здоровье
Психическое здоровье Презентация на тему Способы установления невербального общения во время консультирования
Презентация на тему Способы установления невербального общения во время консультирования Формула Ньютона-Лейбница
Формула Ньютона-Лейбница Военные корабли времен первой и второй Мировой войны
Военные корабли времен первой и второй Мировой войны Statisticheskaya_obrabotka_dannykh_fizicheskogo_experimenta
Statisticheskaya_obrabotka_dannykh_fizicheskogo_experimenta «На крыльях творчества»
«На крыльях творчества»  Презентация на тему Музей Шерлока Холмса (Sherlock Holmes museum)
Презентация на тему Музей Шерлока Холмса (Sherlock Holmes museum) Что такое экономика?
Что такое экономика? Роль воды в жизнедеятельности растений
Роль воды в жизнедеятельности растений Русская национальная культура в хаосе масскульта и маргинальных форм культуры
Русская национальная культура в хаосе масскульта и маргинальных форм культуры «Национальный институт сертифицированных консультантов по управлению(Россия) XIII летняя конференция
«Национальный институт сертифицированных консультантов по управлению(Россия) XIII летняя конференция Оформление пояснительной записки выпускной квалификационной работы
Оформление пояснительной записки выпускной квалификационной работы Повторение. Предложение
Повторение. Предложение Ручная аргонодуговая сварка
Ручная аргонодуговая сварка Structural Analysis of Trusses – Method of Joints
Structural Analysis of Trusses – Method of Joints Договор страхования
Договор страхования