- Бионика

Содержание
- 2. Основные разделы бионики Биокоммуникация Нейробионика. Сенсоры. (Нейронные сети,нейрокомпьютеры, биоэлектроника, биосенсоры) Системы ориентации, локации и навигации Наземные
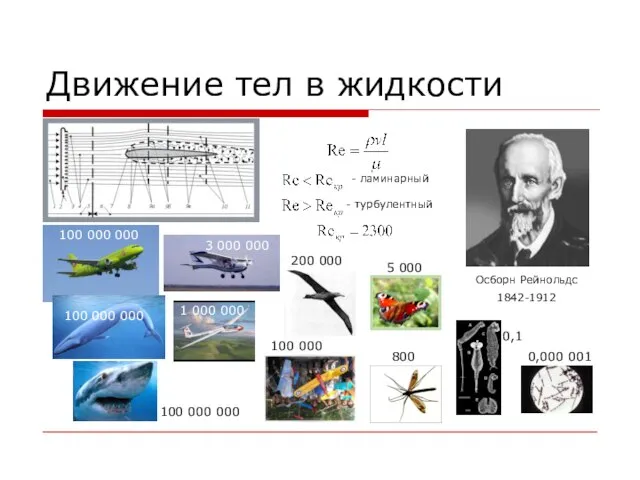
- 3. Движение тел в жидкости Осборн Рейнольдс 1842-1912 - ламинарный - турбулентный 100 000 000 3 000
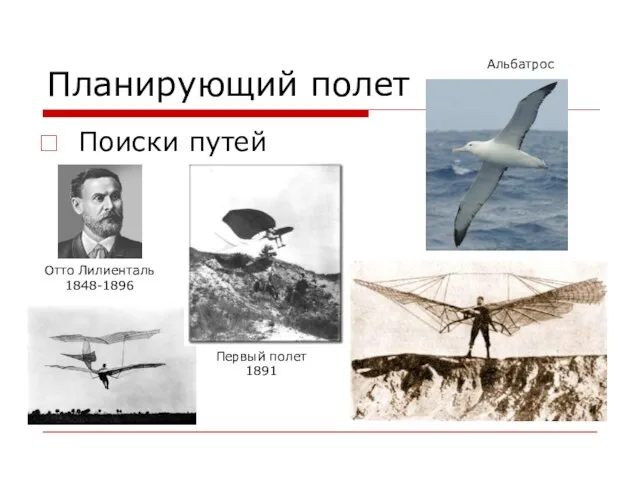
- 4. Планирующий полет Поиски путей Отто Лилиенталь 1848-1896 Первый полет 1891 Альбатрос
- 5. Планирующий полет Поиски путей Орвилл Райт 1871-1948 Уилбер Райт 1867-1912 Первый полет - 1903 Планер Первый
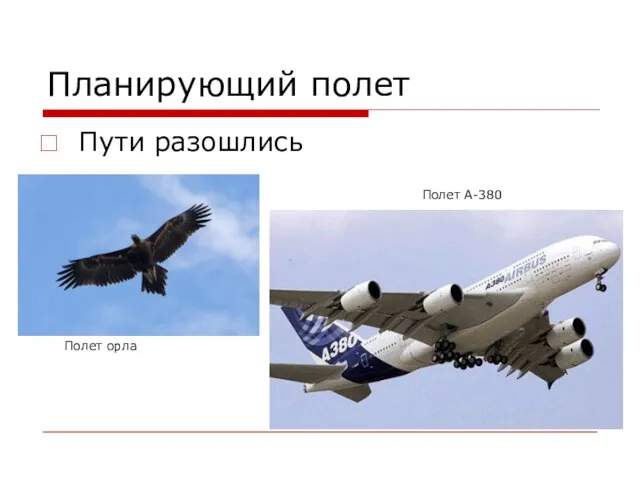
- 6. Планирующий полет Пути разошлись Полет орла Полет А-380
- 7. Управление движением Устойчивое «панцирь»-крыло Панцирные рыбы Появление – 100 000 000 лет Транспортный космический корабль Х-33
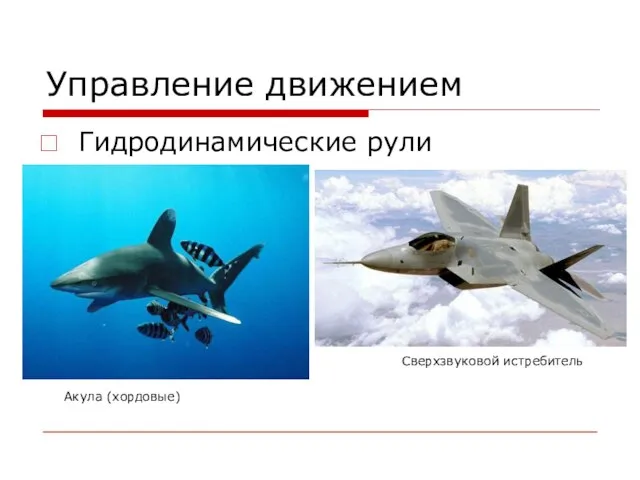
- 8. Управление движением Гидродинамические рули Акула (хордовые) Сверхзвуковой истребитель
- 9. Управление движением Активные рули Окунь (костистоперые) Установка для маневрирования в космосе MMU (США)
- 10. Управление движением Механизация крыла и реверс тяги Голубь в полете Голубь «идет на посадку» Двигатель с
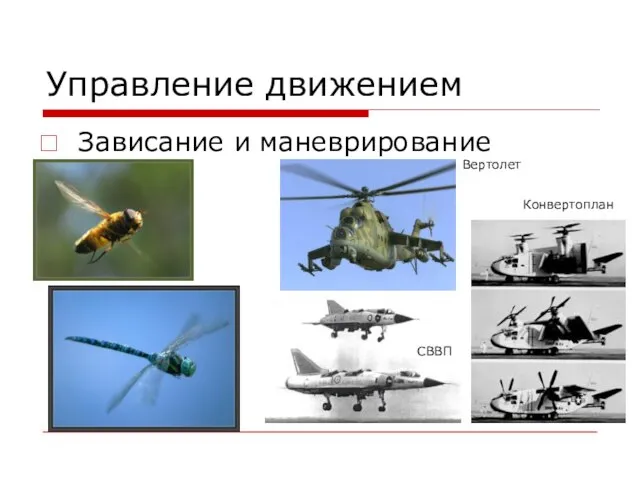
- 11. Управление движением Зависание и маневрирование Вертолет Конвертоплан СВВП
- 12. Машущий полет Полет стрекозы (Яндекс-видео)
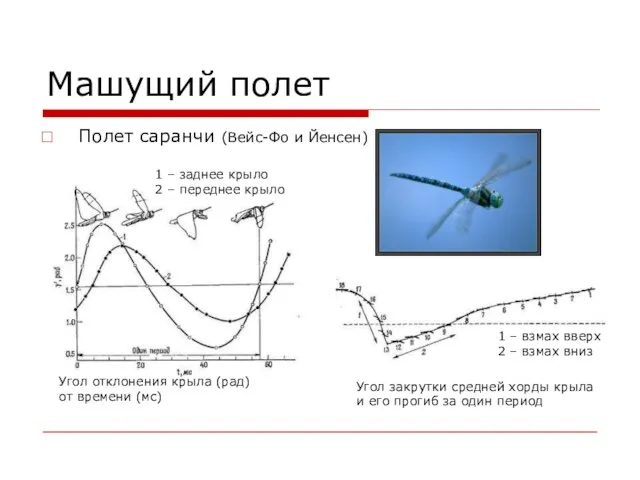
- 13. Машущий полет Полет саранчи (Вейс-Фо и Йенсен) Угол отклонения крыла (рад) от времени (мс) 1 –
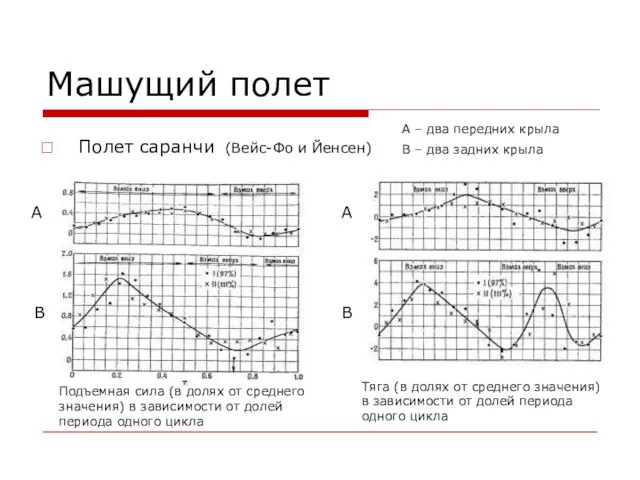
- 14. Машущий полет Полет саранчи (Вейс-Фо и Йенсен) A B A B А – два передних крыла
- 15. Машущий полет Система регулирования Р ИМ ОР ПС Нервная система Мышцы Корпус стрекозы Рецепторы Мозг x
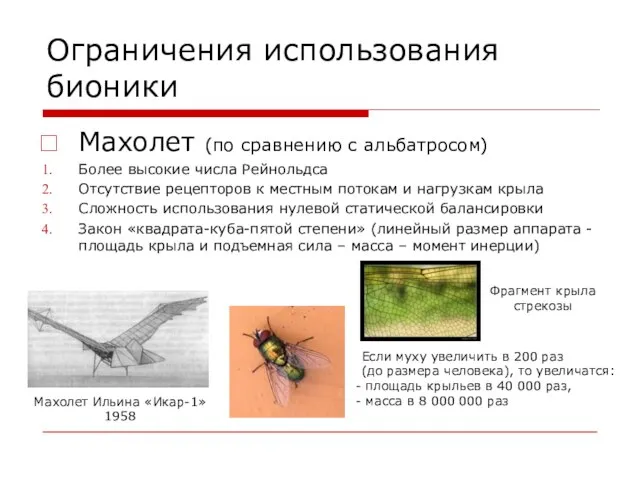
- 16. Ограничения использования бионики Махолет (по сравнению с альбатросом) Более высокие числа Рейнольдса Отсутствие рецепторов к местным
- 17. Применение результатов исследований бионики Искусственное ухо Микрофон – процессор – имплантированные электроды – слуховой нерв
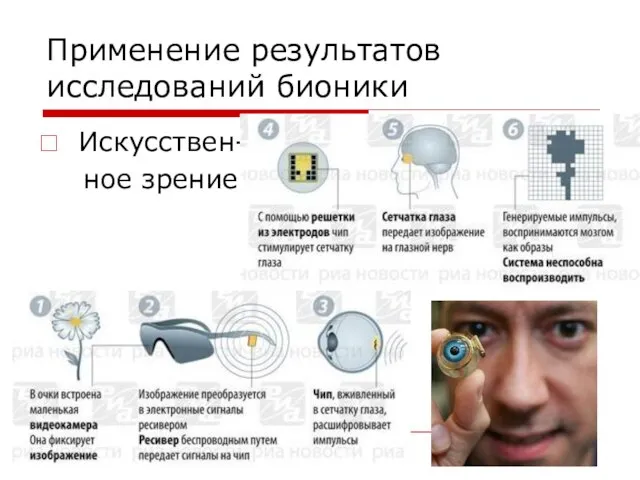
- 18. Применение результатов исследований бионики Искусствен- ное зрение
- 19. Применение результатов исследований бионики Протезирование конечностей
- 20. Применение результатов исследований бионики
- 22. Скачать презентацию
Слайд 2Основные разделы бионики
Биокоммуникация
Нейробионика. Сенсоры. (Нейронные сети,нейрокомпьютеры, биоэлектроника, биосенсоры)
Системы ориентации, локации и
Основные разделы бионики
Биокоммуникация
Нейробионика. Сенсоры. (Нейронные сети,нейрокомпьютеры, биоэлектроника, биосенсоры)
Системы ориентации, локации и
Слайд 3Движение тел в жидкости
Осборн Рейнольдс
1842-1912
- ламинарный
- турбулентный
100 000 000
3 000 000
1 000
Движение тел в жидкости
Осборн Рейнольдс
1842-1912
- ламинарный
- турбулентный
100 000 000
3 000 000
1 000
Слайд 4Планирующий полет
Поиски путей
Отто Лилиенталь
1848-1896
Первый полет
1891
Альбатрос
Планирующий полет
Поиски путей
Отто Лилиенталь
1848-1896
Первый полет
1891
Альбатрос
Слайд 5Планирующий полет
Поиски путей
Орвилл Райт
1871-1948
Уилбер Райт
1867-1912
Первый полет - 1903
Планер
Первый самолет
Планирующий полет
Поиски путей
Орвилл Райт
1871-1948
Уилбер Райт
1867-1912
Первый полет - 1903
Планер
Первый самолет

Слайд 6Планирующий полет
Пути разошлись
Полет орла
Полет А-380
Планирующий полет
Пути разошлись
Полет орла
Полет А-380
Слайд 7Управление движением
Устойчивое «панцирь»-крыло
Панцирные рыбы
Появление – 100 000 000 лет
Транспортный космический корабль Х-33
Управление движением
Устойчивое «панцирь»-крыло
Панцирные рыбы
Появление – 100 000 000 лет
Транспортный космический корабль Х-33

Слайд 8Управление движением
Гидродинамические рули
Акула (хордовые)
Сверхзвуковой истребитель
Управление движением
Гидродинамические рули
Акула (хордовые)
Сверхзвуковой истребитель
Слайд 9Управление движением
Активные рули
Окунь (костистоперые)
Установка для маневрирования
в космосе MMU (США)
Управление движением
Активные рули
Окунь (костистоперые)
Установка для маневрирования
в космосе MMU (США)

Слайд 10Управление движением
Механизация крыла
и реверс тяги
Голубь
в полете
Голубь
«идет на
посадку»
Двигатель с реверсом
Управление движением
Механизация крыла
и реверс тяги
Голубь
в полете
Голубь
«идет на
посадку»
Двигатель с реверсом

Слайд 11Управление движением
Зависание и маневрирование
Вертолет
Конвертоплан
СВВП
Управление движением
Зависание и маневрирование
Вертолет
Конвертоплан
СВВП
Слайд 12Машущий полет
Полет стрекозы
(Яндекс-видео)
Машущий полет
Полет стрекозы
(Яндекс-видео)
Слайд 13Машущий полет
Полет саранчи (Вейс-Фо и Йенсен)
Угол отклонения крыла (рад)
от времени (мс)
1 –
Машущий полет
Полет саранчи (Вейс-Фо и Йенсен)
Угол отклонения крыла (рад)
от времени (мс)
1 –
Слайд 14Машущий полет
Полет саранчи (Вейс-Фо и Йенсен)
A
B
A
B
А – два передних крыла
В – два
Машущий полет
Полет саранчи (Вейс-Фо и Йенсен)
A
B
A
B
А – два передних крыла
В – два
Слайд 15Машущий полет
Система регулирования
Р
ИМ
ОР
ПС
Нервная
система
Мышцы
Корпус
стрекозы
Рецепторы
Мозг
x
x
y
z
φ
w
ОР
ИМ
ПС
Р + «Гироскоп»
Р - регулятор
ИМ – исполнительный механизм
ОР – объект
Машущий полет
Система регулирования
Р
ИМ
ОР
ПС
Нервная
система
Мышцы
Корпус
стрекозы
Рецепторы
Мозг
x
x
y
z
φ
w
ОР
ИМ
ПС
Р + «Гироскоп»
Р - регулятор
ИМ – исполнительный механизм
ОР – объект

Слайд 16Ограничения использования бионики
Махолет (по сравнению с альбатросом)
Более высокие числа Рейнольдса
Отсутствие рецепторов к
Ограничения использования бионики
Махолет (по сравнению с альбатросом)
Более высокие числа Рейнольдса
Отсутствие рецепторов к
Слайд 17Применение результатов исследований бионики
Искусственное ухо
Микрофон – процессор –
имплантированные электроды –
слуховой
Применение результатов исследований бионики
Искусственное ухо
Микрофон – процессор –
имплантированные электроды –
слуховой

Слайд 18Применение результатов исследований бионики
Искусствен-
ное зрение
Применение результатов исследований бионики
Искусствен-
ное зрение
Слайд 19Применение результатов исследований бионики
Протезирование конечностей
Применение результатов исследований бионики
Протезирование конечностей

Слайд 20Применение результатов исследований бионики
Применение результатов исследований бионики
 Мобильная система обучения КИП-М (компьютерная интеллектуальная поддержка на основе мобильной связи)
Мобильная система обучения КИП-М (компьютерная интеллектуальная поддержка на основе мобильной связи) Vlianie_pogody_na_trudosposobnost_studentov
Vlianie_pogody_na_trudosposobnost_studentov Влияние человечества на эволюцию биосферы. История экологических кризисов.
Влияние человечества на эволюцию биосферы. История экологических кризисов. Показатели уровня жизни населения в контексте экономического развития России
Показатели уровня жизни населения в контексте экономического развития России Презентация на тему Россия – Родина моя 1 класс
Презентация на тему Россия – Родина моя 1 класс Презентация на тему Классификация овощей
Презентация на тему Классификация овощей  Аспекты гадания. Занятие 3
Аспекты гадания. Занятие 3 СЛОВО КАК НАЗВАНИЕ КАКОГО – ЛИБО ФРАГМЕНТА НАЦИОНАЛЬНОЙ КУЛЬТУРЫ И ИСТОРИИ
СЛОВО КАК НАЗВАНИЕ КАКОГО – ЛИБО ФРАГМЕНТА НАЦИОНАЛЬНОЙ КУЛЬТУРЫ И ИСТОРИИ Пространство и время в кино
Пространство и время в кино Источники права периода централизации государства
Источники права периода централизации государства Государственные символы Донецкой Народной Республики
Государственные символы Донецкой Народной Республики Тел төҙәткестәр
Тел төҙәткестәр Теория маркетинга
Теория маркетинга ГОСУДАРСТВЕННОЕ ОБЛАСТНОЕ УЧРЕЖДЕНИЕ СОЦАЛЬНОГО ОБСЛУЖИВАНИЯ СИСТЕМЫ СОЦИАЛЬНОЙ ЗАЩИТЫ НАСЕЛЕНИЯ «Терский центр социальной по
ГОСУДАРСТВЕННОЕ ОБЛАСТНОЕ УЧРЕЖДЕНИЕ СОЦАЛЬНОГО ОБСЛУЖИВАНИЯ СИСТЕМЫ СОЦИАЛЬНОЙ ЗАЩИТЫ НАСЕЛЕНИЯ «Терский центр социальной по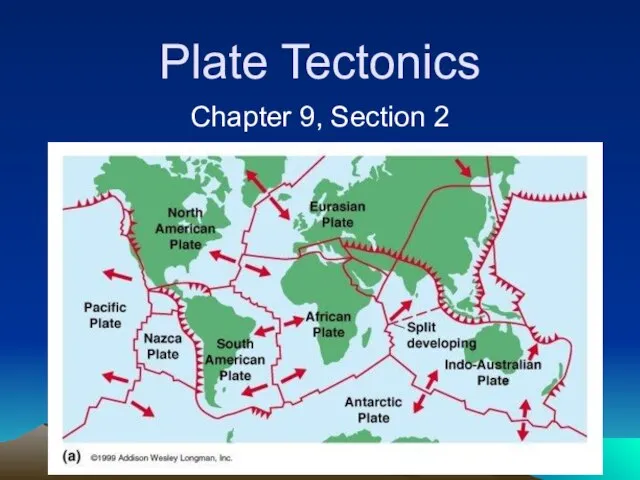 Plate tectonics
Plate tectonics  ООО Санта ритейл
ООО Санта ритейл Познавательная ирга для младших школьников по английскому языку it’s fun learning English
Познавательная ирга для младших школьников по английскому языку it’s fun learning English Московский городской психолого-педагогический университет
Московский городской психолого-педагогический университет Животворящий кислород BigOx
Животворящий кислород BigOx Конструкция used to
Конструкция used to Урок гражданственности Донбасса. Береги честь смолоду
Урок гражданственности Донбасса. Береги честь смолоду Графическая информация
Графическая информация Презентация на тему Внебюджетные фонды в Казахстане
Презентация на тему Внебюджетные фонды в Казахстане  Донецкая Народная Республика
Донецкая Народная Республика Выбор главных размерений яхт. Расчет площади парусности
Выбор главных размерений яхт. Расчет площади парусности Конфликты
Конфликты Заколдованные цифры
Заколдованные цифры 20180102_do_m_zhalsabonlv_konspekt
20180102_do_m_zhalsabonlv_konspekt