Дюндюков Владислав Сергеевич Московский государственный технический университет им. Н.Э. Баумана, кафедра «Компьютерные системы
- Дюндюков Владислав Сергеевич Московский государственный технический университет им. Н.Э. Баумана, кафедра «Компьютерные системы

Содержание
- 2. ПРЕДЫСТОРИЯ 1. Потоки в сетях (алгоритм Форда-Фалкерсона) 2. Метод и программная среда РДО (ресурсы-действия-операции) В.В. Емельянова
- 3. ОСНОВНЫЕ ПАРАМЕТРЫ ПРОЦЕССА ВЗАИМОДЕЙСТВИЯ АГЕНТОВ В МАС 1) Совместимость целей или намерений агентов; 2) Отношение агентов
- 4. РЕСУРСЫ В МНОГОАГЕНТНЫХ СИСТЕМАХ Под ресурсами понимаются любые средства, полезные для достижения цели агента или МАС.
- 5. МАС КАК ПОЛИСТРУКТУРНАЯ СИСТЕМА Любая МАС является полиструктурной и представляет собой единство экстенсивных структур, преимущественно развертывающихся
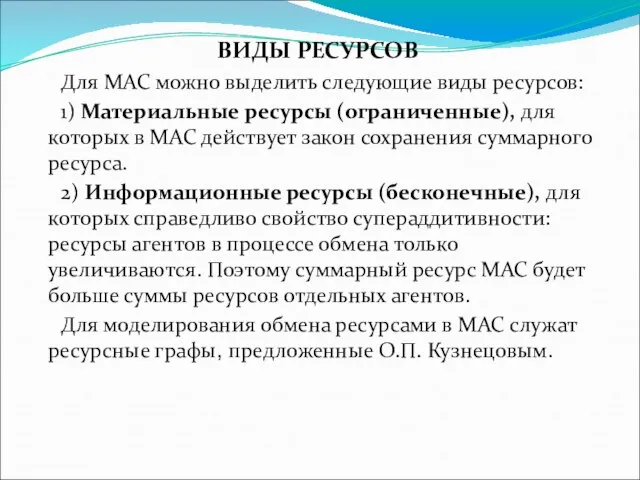
- 6. ВИДЫ РЕСУРСОВ Для МАС можно выделить следующие виды ресурсов: 1) Материальные ресурсы (ограниченные), для которых в
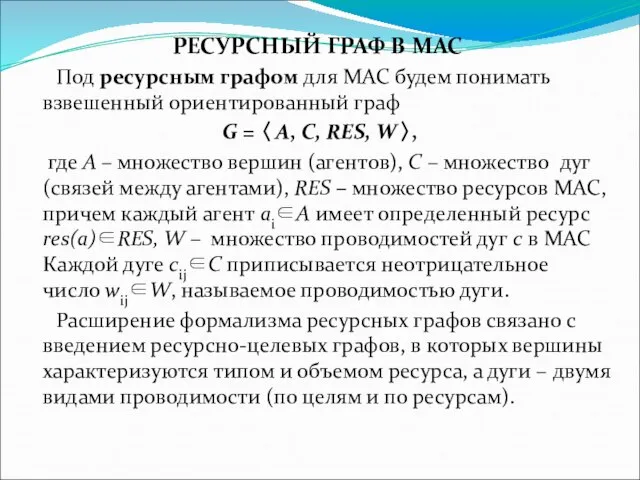
- 7. РЕСУРСНЫЙ ГРАФ В МАС Под ресурсным графом для МАС будем понимать взвешенный ориентированный граф G =
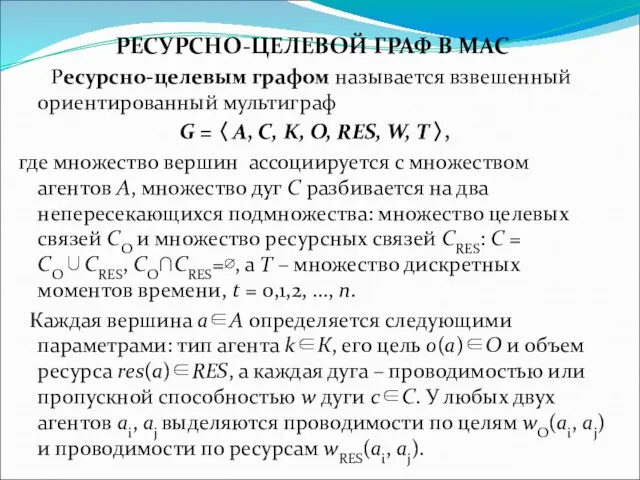
- 8. РЕСУРСНО-ЦЕЛЕВОЙ ГРАФ В МАС Ресурсно-целевым графом называется взвешенный ориентированный мультиграф G = 〈 A, C, K,
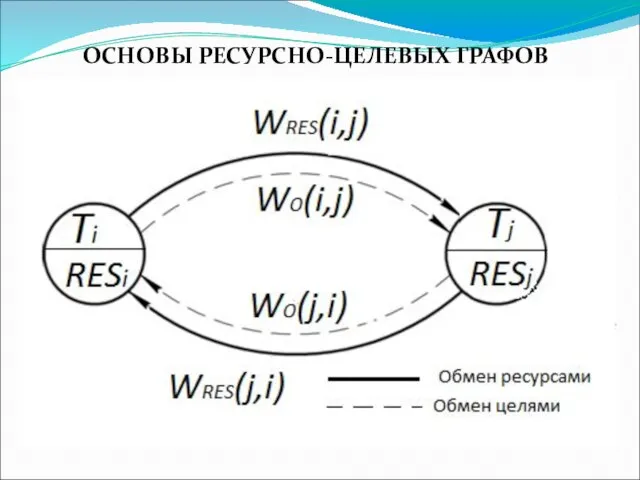
- 9. ОСНОВЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ
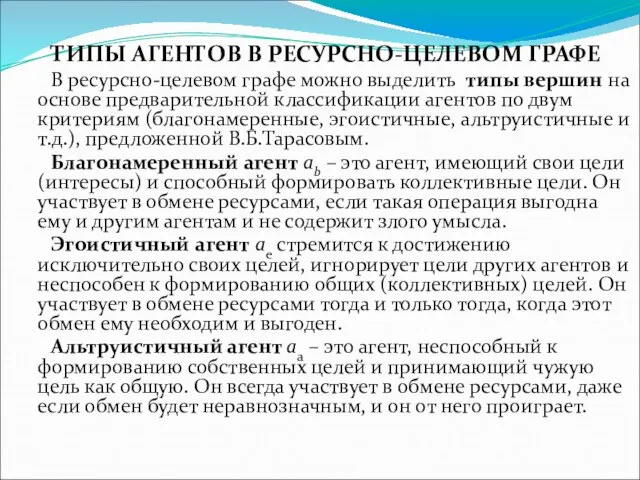
- 10. ТИПЫ АГЕНТОВ В РЕСУРСНО-ЦЕЛЕВОМ ГРАФЕ В ресурcно-целевом графе можно выделить типы вершин на основе предварительной классификации
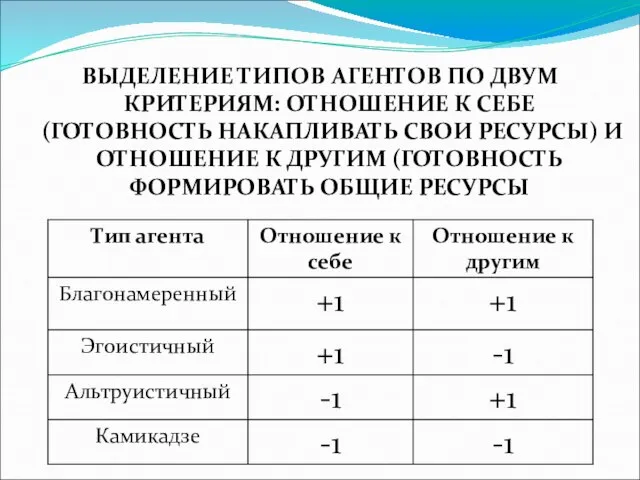
- 11. ВЫДЕЛЕНИЕ ТИПОВ АГЕНТОВ ПО ДВУМ КРИТЕРИЯМ: ОТНОШЕНИЕ К СЕБЕ (ГОТОВНОСТЬ НАКАПЛИВАТЬ СВОИ РЕСУРСЫ) И ОТНОШЕНИЕ К
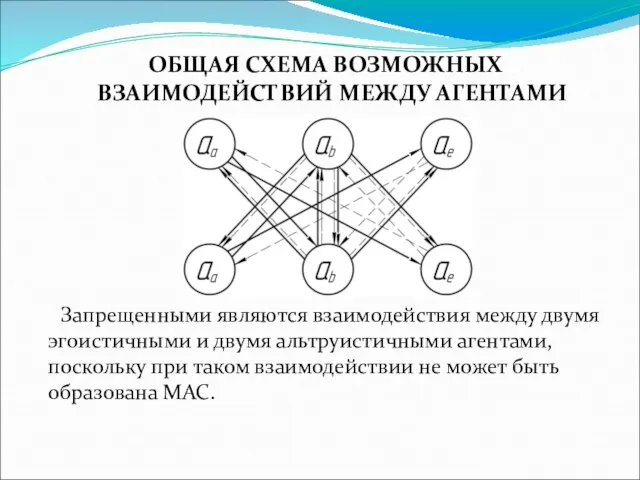
- 12. ОБЩАЯ СХЕМА ВОЗМОЖНЫХ ВЗАИМОДЕЙСТВИЙ МЕЖДУ АГЕНТАМИ Запрещенными являются взаимодействия между двумя эгоистичными и двумя альтруистичными агентами,
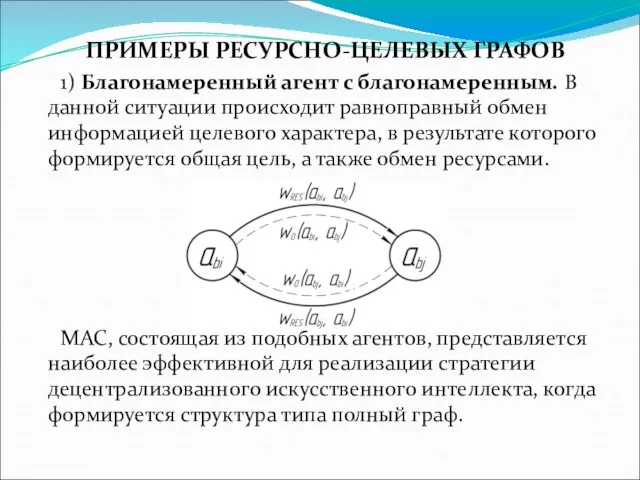
- 13. ПРИМЕРЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ 1) Благонамеренный агент с благонамеренным. В данной ситуации происходит равноправный обмен информацией целевого
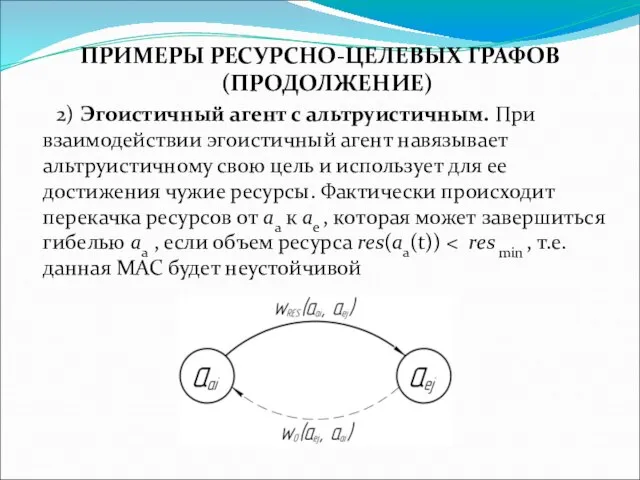
- 14. ПРИМЕРЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ (ПРОДОЛЖЕНИЕ) 2) Эгоистичный агент с альтруистичным. При взаимодействии эгоистичный агент навязывает альтруистичному свою
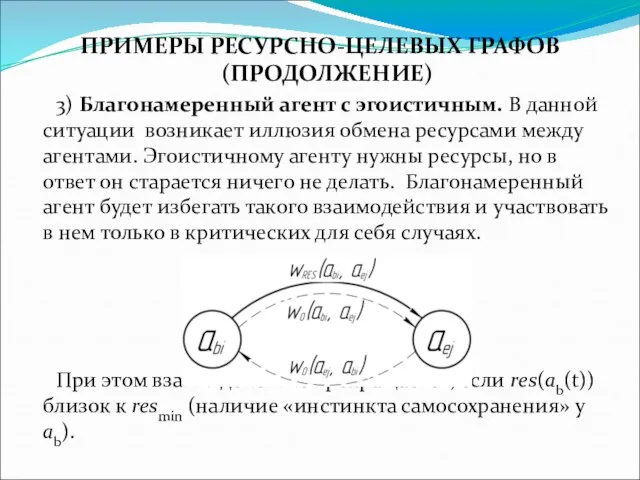
- 15. ПРИМЕРЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ (ПРОДОЛЖЕНИЕ) 3) Благонамеренный агент с эгоистичным. В данной ситуации возникает иллюзия обмена ресурсами
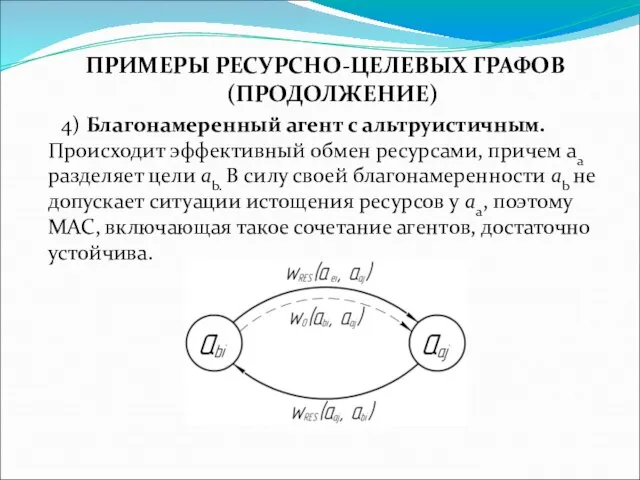
- 16. ПРИМЕРЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ (ПРОДОЛЖЕНИЕ) 4) Благонамеренный агент с альтруистичным. Происходит эффективный обмен ресурсами, причем aa разделяет
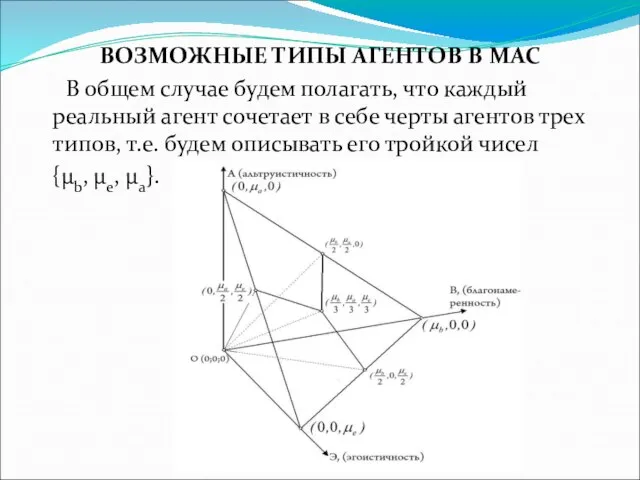
- 17. ВОЗМОЖНЫЕ ТИПЫ АГЕНТОВ В МАС В общем случае будем полагать, что каждый реальный агент сочетает в
- 18. ВЛИЯНИЕ АГЕНТА В РЕСУРСНО-ЦЕЛЕВОМ ГРАФЕ Влияние агента a в МАС определяется собственным ресурсом, числом связей с
- 19. УСЛОВИЯ ПОВЕДЕНИЯ АГЕНТОВ В МАС В процессе обмена объем ресурса агента меняется. При уменьшении ресурса агента
- 20. АССОЦИАЛЬНОЕ ПОВЕДЕНИЕ АГЕНТОВ В МАС Если объем ресурса агента Res(ai(t)) ≥ Resmax , (ситуация бесконтрольного возрастания
- 22. Скачать презентацию
Слайд 2ПРЕДЫСТОРИЯ
1. Потоки в сетях (алгоритм Форда-Фалкерсона)
2. Метод и программная среда РДО (ресурсы-действия-операции)
ПРЕДЫСТОРИЯ
1. Потоки в сетях (алгоритм Форда-Фалкерсона)
2. Метод и программная среда РДО (ресурсы-действия-операции)
Слайд 3ОСНОВНЫЕ ПАРАМЕТРЫ ПРОЦЕССА ВЗАИМОДЕЙСТВИЯ АГЕНТОВ В МАС
1) Совместимость целей или намерений агентов;
2)
ОСНОВНЫЕ ПАРАМЕТРЫ ПРОЦЕССА ВЗАИМОДЕЙСТВИЯ АГЕНТОВ В МАС
1) Совместимость целей или намерений агентов;
2)
Слайд 4РЕСУРСЫ В МНОГОАГЕНТНЫХ СИСТЕМАХ
Под ресурсами понимаются любые средства, полезные для достижения цели
РЕСУРСЫ В МНОГОАГЕНТНЫХ СИСТЕМАХ
Под ресурсами понимаются любые средства, полезные для достижения цели
Слайд 5МАС КАК ПОЛИСТРУКТУРНАЯ СИСТЕМА
Любая МАС является полиструктурной и представляет собой единство экстенсивных
МАС КАК ПОЛИСТРУКТУРНАЯ СИСТЕМА
Любая МАС является полиструктурной и представляет собой единство экстенсивных
Слайд 6ВИДЫ РЕСУРСОВ
Для МАС можно выделить следующие виды ресурсов:
1) Материальные ресурсы (ограниченные), для
ВИДЫ РЕСУРСОВ
Для МАС можно выделить следующие виды ресурсов:
1) Материальные ресурсы (ограниченные), для
Слайд 7РЕСУРСНЫЙ ГРАФ В МАС
Под ресурсным графом для МАС будем понимать взвешенный ориентированный
РЕСУРСНЫЙ ГРАФ В МАС
Под ресурсным графом для МАС будем понимать взвешенный ориентированный
Слайд 8РЕСУРСНО-ЦЕЛЕВОЙ ГРАФ В МАС
Ресурсно-целевым графом называется взвешенный ориентированный мультиграф
G = 〈
РЕСУРСНО-ЦЕЛЕВОЙ ГРАФ В МАС
Ресурсно-целевым графом называется взвешенный ориентированный мультиграф
G = 〈
Слайд 9ОСНОВЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ
ОСНОВЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ
Слайд 10ТИПЫ АГЕНТОВ В РЕСУРСНО-ЦЕЛЕВОМ ГРАФЕ
В ресурcно-целевом графе можно выделить типы вершин на
ТИПЫ АГЕНТОВ В РЕСУРСНО-ЦЕЛЕВОМ ГРАФЕ
В ресурcно-целевом графе можно выделить типы вершин на
Слайд 11ВЫДЕЛЕНИЕ ТИПОВ АГЕНТОВ ПО ДВУМ КРИТЕРИЯМ: ОТНОШЕНИЕ К СЕБЕ (ГОТОВНОСТЬ НАКАПЛИВАТЬ СВОИ
ВЫДЕЛЕНИЕ ТИПОВ АГЕНТОВ ПО ДВУМ КРИТЕРИЯМ: ОТНОШЕНИЕ К СЕБЕ (ГОТОВНОСТЬ НАКАПЛИВАТЬ СВОИ
Слайд 12 ОБЩАЯ СХЕМА ВОЗМОЖНЫХ ВЗАИМОДЕЙСТВИЙ МЕЖДУ АГЕНТАМИ
Запрещенными являются взаимодействия между двумя
ОБЩАЯ СХЕМА ВОЗМОЖНЫХ ВЗАИМОДЕЙСТВИЙ МЕЖДУ АГЕНТАМИ
Запрещенными являются взаимодействия между двумя
Слайд 13 ПРИМЕРЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ
1) Благонамеренный агент с благонамеренным. В данной ситуации происходит
ПРИМЕРЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ
1) Благонамеренный агент с благонамеренным. В данной ситуации происходит
Слайд 14 ПРИМЕРЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ (ПРОДОЛЖЕНИЕ)
2) Эгоистичный агент с альтруистичным. При взаимодействии эгоистичный
ПРИМЕРЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ (ПРОДОЛЖЕНИЕ)
2) Эгоистичный агент с альтруистичным. При взаимодействии эгоистичный
Слайд 15 ПРИМЕРЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ (ПРОДОЛЖЕНИЕ)
3) Благонамеренный агент с эгоистичным. В данной ситуации
ПРИМЕРЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ (ПРОДОЛЖЕНИЕ)
3) Благонамеренный агент с эгоистичным. В данной ситуации
Слайд 16 ПРИМЕРЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ (ПРОДОЛЖЕНИЕ)
4) Благонамеренный агент с альтруистичным. Происходит эффективный обмен
ПРИМЕРЫ РЕСУРСНО-ЦЕЛЕВЫХ ГРАФОВ (ПРОДОЛЖЕНИЕ)
4) Благонамеренный агент с альтруистичным. Происходит эффективный обмен
Слайд 17ВОЗМОЖНЫЕ ТИПЫ АГЕНТОВ В МАС
В общем случае будем полагать, что каждый реальный
ВОЗМОЖНЫЕ ТИПЫ АГЕНТОВ В МАС
В общем случае будем полагать, что каждый реальный
Слайд 18ВЛИЯНИЕ АГЕНТА
В РЕСУРСНО-ЦЕЛЕВОМ ГРАФЕ
Влияние агента a в МАС определяется собственным ресурсом,
ВЛИЯНИЕ АГЕНТА
В РЕСУРСНО-ЦЕЛЕВОМ ГРАФЕ
Влияние агента a в МАС определяется собственным ресурсом,
Слайд 19УСЛОВИЯ ПОВЕДЕНИЯ АГЕНТОВ В МАС
В процессе обмена объем ресурса агента меняется.
УСЛОВИЯ ПОВЕДЕНИЯ АГЕНТОВ В МАС
В процессе обмена объем ресурса агента меняется.
Слайд 20АССОЦИАЛЬНОЕ ПОВЕДЕНИЕ АГЕНТОВ В МАС
Если объем ресурса агента
Res(ai(t)) ≥ Resmax ,
(ситуация бесконтрольного
АССОЦИАЛЬНОЕ ПОВЕДЕНИЕ АГЕНТОВ В МАС
Если объем ресурса агента
Res(ai(t)) ≥ Resmax ,
(ситуация бесконтрольного
 ОАО "ЛВЗ "Висант"
ОАО "ЛВЗ "Висант" Новые явления в экономике. Россия в XVII веке
Новые явления в экономике. Россия в XVII веке Презентация на тему Экологические группы растений по отношению к воде
Презентация на тему Экологические группы растений по отношению к воде  Выразительное чтение
Выразительное чтение Виды подчинительной связи слов в словосочетании
Виды подчинительной связи слов в словосочетании Людмила Петрушевская СТРАНА
Людмила Петрушевская СТРАНА Горный поход. Приэльбрусье
Горный поход. Приэльбрусье Анализ, самоанализ учебных занятий
Анализ, самоанализ учебных занятий Идеи для рукоделия. Пуговицы + фантазия. Подборка креативных идей нетрадиционного использования пуговиц
Идеи для рукоделия. Пуговицы + фантазия. Подборка креативных идей нетрадиционного использования пуговиц Компьютерные технологии
Компьютерные технологии  Теорема Виета
Теорема Виета Экспресс-заключение о стоимости объекта
Экспресс-заключение о стоимости объекта Азбука пенсионной системы
Азбука пенсионной системы  Появление неравенства и знати (5 класс)
Появление неравенства и знати (5 класс) Россия
Россия 56 ДА! энергоэффективности
56 ДА! энергоэффективности GRAMMATICAL ASPECTS OF TRANSLATION
GRAMMATICAL ASPECTS OF TRANSLATION Урок – исследование
Урок – исследование Периодичесий закон
Периодичесий закон Л.В. Чайка, методист ГРЦИО «Тьютор»
Л.В. Чайка, методист ГРЦИО «Тьютор» Образы античной мифологии в мировой художественной культуре
Образы античной мифологии в мировой художественной культуре Presentation Title
Presentation Title  Проект цеха по производству изделия из оборудования гостиной из МДФ с программой выпуска 50000 штук в год в г. Шымкенте
Проект цеха по производству изделия из оборудования гостиной из МДФ с программой выпуска 50000 штук в год в г. Шымкенте День правовой помощи детям
День правовой помощи детям "Федеральный проект «Наша новая школа ОСНОВНЫЕ ЗАДАЧИ ПРОЕКТА."
"Федеральный проект «Наша новая школа ОСНОВНЫЕ ЗАДАЧИ ПРОЕКТА." ООО Маммингер. Поставщик плодоовощной продукции
ООО Маммингер. Поставщик плодоовощной продукции Почему электрошпиндель и мотор-шпиндель имеют различные области применения?
Почему электрошпиндель и мотор-шпиндель имеют различные области применения? Подтверждение права на льготу по карте Стрелка в МФЦ
Подтверждение права на льготу по карте Стрелка в МФЦ