- Экспертные системы распознавания химических веществ

Содержание
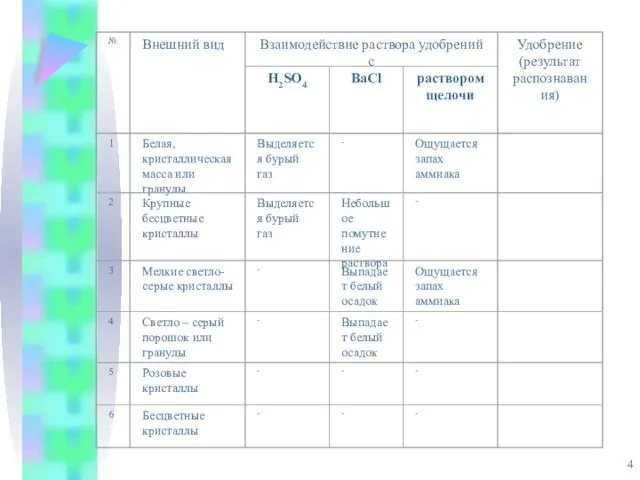
- 2. Экспертные системы – системы распознавания объектов или состояния объектов среди некоторой совокупности. Пример: Лабораторная работу по
- 3. Проект «Распознавание удобрений» Цель: Создать модель экспертной системы распознавания удобрений на языке Visual Basic, которая будет
- 5. Информационные модели управления объектами
- 6. В процессе функционирования сложных систем важную роль играют информационные процессы управления. В любом процессе управления происходит
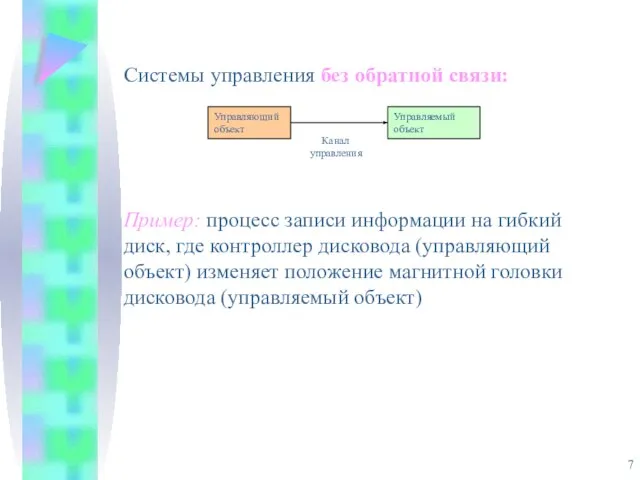
- 7. Системы управления без обратной связи: Пример: процесс записи информации на гибкий диск, где контроллер дисковода (управляющий
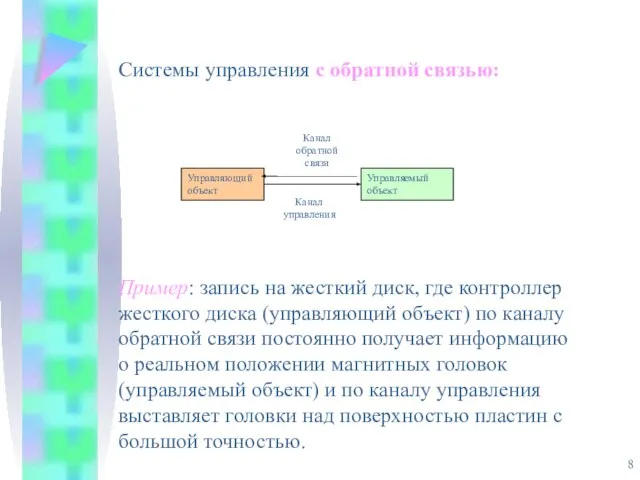
- 8. Системы управления с обратной связью: Пример: запись на жесткий диск, где контроллер жесткого диска (управляющий объект)
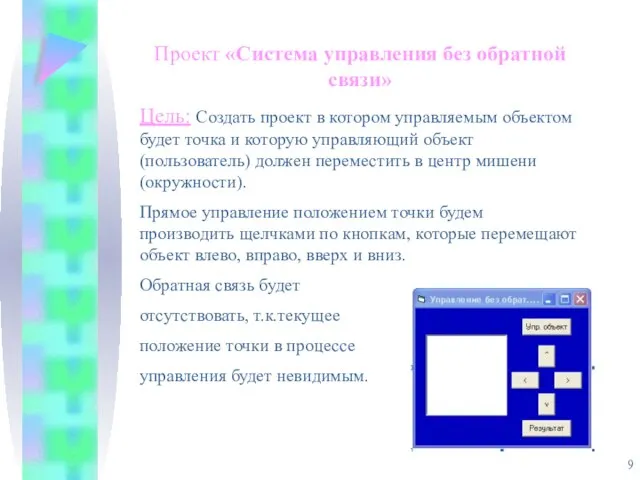
- 9. Проект «Система управления без обратной связи» Цель: Создать проект в котором управляемым объектом будет точка и
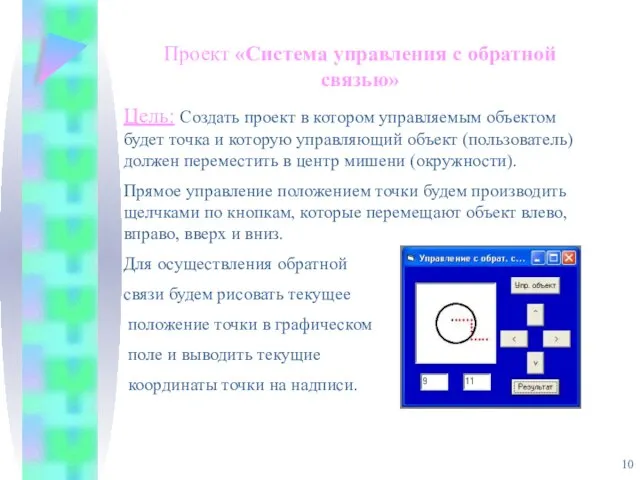
- 10. Проект «Система управления с обратной связью» Цель: Создать проект в котором управляемым объектом будет точка и
- 12. Скачать презентацию
Слайд 2Экспертные системы – системы распознавания объектов или состояния объектов среди некоторой совокупности.
Пример:
Экспертные системы – системы распознавания объектов или состояния объектов среди некоторой совокупности.
Пример:
Слайд 3Проект «Распознавание удобрений»
Цель: Создать модель экспертной системы распознавания удобрений на языке Visual
Проект «Распознавание удобрений»
Цель: Создать модель экспертной системы распознавания удобрений на языке Visual
Слайд 5Информационные модели управления объектами
Информационные модели управления объектами
Слайд 6 В процессе функционирования сложных систем важную роль играют информационные процессы управления.
В процессе функционирования сложных систем важную роль играют информационные процессы управления.
Слайд 7Системы управления без обратной связи:
Пример: процесс записи информации на гибкий диск, где
Системы управления без обратной связи:
Пример: процесс записи информации на гибкий диск, где
Слайд 8Системы управления с обратной связью:
Пример: запись на жесткий диск, где контроллер жесткого
Системы управления с обратной связью:
Пример: запись на жесткий диск, где контроллер жесткого
Слайд 9Проект «Система управления без обратной связи»
Цель: Создать проект в котором управляемым объектом
Проект «Система управления без обратной связи»
Цель: Создать проект в котором управляемым объектом
Слайд 10Проект «Система управления с обратной связью»
Цель: Создать проект в котором управляемым объектом
Проект «Система управления с обратной связью»
Цель: Создать проект в котором управляемым объектом
 Введение в специальность
Введение в специальность Изменения налогового законодательства 2021
Изменения налогового законодательства 2021 The study of the American Democracy in today's world
The study of the American Democracy in today's world Художник в цирке
Художник в цирке Половозрастные особенности мотивации
Половозрастные особенности мотивации м. Буськ, вул.Надсяння
м. Буськ, вул.Надсяння Что такое любовь
Что такое любовь Презентация на тему УКУСЫ ЗМЕЙ
Презентация на тему УКУСЫ ЗМЕЙ  Всероссийское совещание «Об итогах прохождения субъектами электроэнергетики осенне-зимнего периода 2009-2010 годов и задачах на пред
Всероссийское совещание «Об итогах прохождения субъектами электроэнергетики осенне-зимнего периода 2009-2010 годов и задачах на пред ПРАВИЛА ПОВЕДЕНИЯ В СИТУАЦИЯХ КРИМИНОГЕННОГО ХАРАКТЕРА
ПРАВИЛА ПОВЕДЕНИЯ В СИТУАЦИЯХ КРИМИНОГЕННОГО ХАРАКТЕРА «Господин из Сан-Франциско» Иван Бунин
«Господин из Сан-Франциско» Иван Бунин Легенда об Антонио Гауди
Легенда об Антонио Гауди Германские земли в XVIII веке
Германские земли в XVIII веке электронная сигарета
электронная сигарета Трехмачтовый корабль
Трехмачтовый корабль Управление введением в образовательные учреждения федеральных государственных образовательных стандартов 5 направлений 20 упра
Управление введением в образовательные учреждения федеральных государственных образовательных стандартов 5 направлений 20 упра Инфляция издержек
Инфляция издержек Филиал московского университета имени С.Ю. Витте в г. Сергиев Посад, для выпускников 11 классов
Филиал московского университета имени С.Ю. Витте в г. Сергиев Посад, для выпускников 11 классов Биосфера
Биосфера Юридическая психология
Юридическая психология Her zaman yardima hazırız
Her zaman yardima hazırız ОХРАНА ОКРУЖАЮЩЕЙ СРЕДЫ – ПРИОРИТЕТНЫЙ ВОПРОС ПОЛИТИЧЕСКОЙ, ЭКОНОМИЧЕСКОЙ И ОБЩЕСТВЕНОЙ ЖИЗНИ СТРАНЫ
ОХРАНА ОКРУЖАЮЩЕЙ СРЕДЫ – ПРИОРИТЕТНЫЙ ВОПРОС ПОЛИТИЧЕСКОЙ, ЭКОНОМИЧЕСКОЙ И ОБЩЕСТВЕНОЙ ЖИЗНИ СТРАНЫ ИЗОБРАЖЕНИЯ ДЕТЕЙВ ИЗОБРАЗИТЕЛЬНОМ ИСКУССТВЕ
ИЗОБРАЖЕНИЯ ДЕТЕЙВ ИЗОБРАЗИТЕЛЬНОМ ИСКУССТВЕ Автономному дому – свою микро-ТЭЦ
Автономному дому – свою микро-ТЭЦ GIGAFONE ™Реклама в сетях мобильной связи«Вам звонят – мы платим»
GIGAFONE ™Реклама в сетях мобильной связи«Вам звонят – мы платим» 150 лет со дня рождения великого реформатора П. А. Столыпина
150 лет со дня рождения великого реформатора П. А. Столыпина Who wants to be a millionaire
Who wants to be a millionaire Участники арбитражного процесса
Участники арбитражного процесса