- Генерация вероятностных автоматов методами Reinforcement Learning

Содержание
- 2. Стимулирующее обучение
- 3. Вероятностные автоматы Моделирование сложных систем, имеющих стохастическую природу Построение мобильных агентов
- 4. Обучение автомата Действие Проверка «слабого условия» Перераспределение вероятностей
- 5. Применение стимулирующего обучения Работать непосредственно с вероятностной моделью непрактично Генерация автоматной модели
- 6. Q-learning: статические задачи Обучение Q-функции Порождение оптимальной стратегии
- 7. Q-learning: стохастические системы Обучение Q-функции Подсчёт вероятностей переходов Сжатие вероятностной модели
- 8. Пример задачи на двумерном поле Клетка поля определяет текущее состояние мобильного робота Четыре доступных действия Выделенные
- 9. Тестовый пример
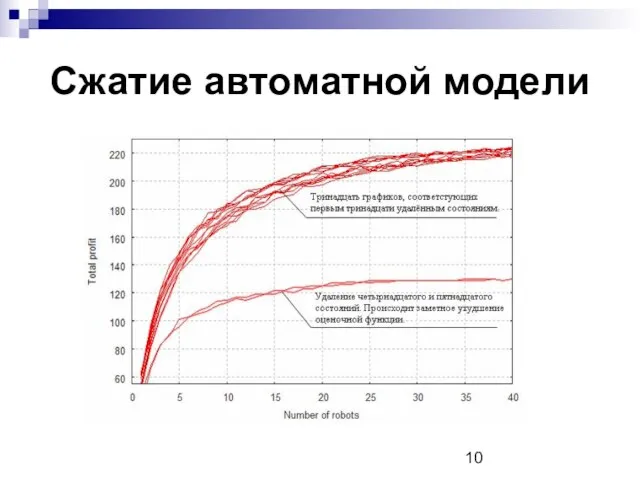
- 10. Сжатие автоматной модели
- 12. Скачать презентацию

Слайд 3Вероятностные автоматы
Моделирование сложных систем, имеющих стохастическую природу
Построение мобильных агентов
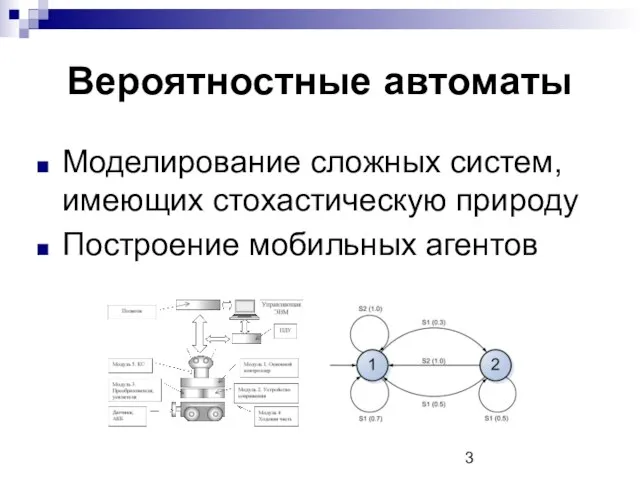
Вероятностные автоматы
Моделирование сложных систем, имеющих стохастическую природу
Построение мобильных агентов
Слайд 4Обучение автомата
Действие
Проверка «слабого условия»
Перераспределение вероятностей
Обучение автомата
Действие
Проверка «слабого условия»
Перераспределение вероятностей
Слайд 5Применение
стимулирующего обучения
Работать непосредственно с вероятностной моделью непрактично
Генерация автоматной модели
Применение
стимулирующего обучения
Работать непосредственно с вероятностной моделью непрактично
Генерация автоматной модели
Слайд 6Q-learning:
статические задачи
Обучение Q-функции
Порождение оптимальной стратегии
Q-learning:
статические задачи
Обучение Q-функции
Порождение оптимальной стратегии
Слайд 7Q-learning:
стохастические системы
Обучение Q-функции
Подсчёт вероятностей переходов
Сжатие вероятностной модели
Q-learning:
стохастические системы
Обучение Q-функции
Подсчёт вероятностей переходов
Сжатие вероятностной модели
Слайд 8Пример задачи на двумерном поле
Клетка поля определяет текущее состояние мобильного робота
Четыре доступных
Пример задачи на двумерном поле
Клетка поля определяет текущее состояние мобильного робота
Четыре доступных

Слайд 9Тестовый пример
Тестовый пример

Слайд 10Сжатие автоматной модели
Сжатие автоматной модели
 Автономная некоммерческая организация Институт прав человека
Автономная некоммерческая организация Институт прав человека Кубизм, кубофутуризм
Кубизм, кубофутуризм Презентация МХК по программе Даниловой 10 класс
Презентация МХК по программе Даниловой 10 класс 20140127_prezentatsiya_38
20140127_prezentatsiya_38 Физическая культура. Здоровый образ жизни
Физическая культура. Здоровый образ жизни Развивающие упражнения на уроках географии 6 класс
Развивающие упражнения на уроках географии 6 класс Библиотека имени Н.А. Добролюбова г. Пермь, м/р Голованово
Библиотека имени Н.А. Добролюбова г. Пермь, м/р Голованово Презентация на тему Берлинская наступательная операция
Презентация на тему Берлинская наступательная операция Презентация на тему Александр Александрович Блок (1880 – 1921)
Презентация на тему Александр Александрович Блок (1880 – 1921)  Необходимость отмены запретов на пропуск трафика
Необходимость отмены запретов на пропуск трафика Лечение от табакокурения
Лечение от табакокурения Промышленное строительство
Промышленное строительство Авторское право
Авторское право  Презентация на тему Вячеслав Леонидович Кондратьев
Презентация на тему Вячеслав Леонидович Кондратьев  Внеурочная работа в области информационно-коммуникативных технологий и ее место в системе обучения младших школьников
Внеурочная работа в области информационно-коммуникативных технологий и ее место в системе обучения младших школьников Составление бизнес-плана
Составление бизнес-плана Старинные картины
Старинные картины Сайт. Психолог в Обнинске
Сайт. Психолог в Обнинске Музей творческого кризиза КРИК ДУШИ
Музей творческого кризиза КРИК ДУШИ Практика современного кредитования
Практика современного кредитования Изготовление прихватки. Лоскутное шитье
Изготовление прихватки. Лоскутное шитье A school bag
A school bag Морская подвижная служба
Морская подвижная служба Презентация на тему Тепловые машины
Презентация на тему Тепловые машины Изучаем спрос и предложение
Изучаем спрос и предложение НевскийИнаудит
НевскийИнаудит Природные и синтетические красители и ароматизаторы
Природные и синтетические красители и ароматизаторы Кошки– домашние целители
Кошки– домашние целители