- Генетические алгоритмы

Содержание
- 2. Генетические алгоритмы Понятие генетического алгоритма Генети́ческий алгори́тм (англ. genetic algorithm) — это эвристический алгоритм поиска, применяемый
- 3. Принцип работы ГА Задача кодируется таким образом, чтобы её решение могло быть представлено в виде вектора
- 4. Этапы генетического алгоритма Создание начальной популяции Вычисление функций приспособленности для особей популяции (оценивание) Начало цикла: Выбор
- 5. Модель «эволюционного процесса»
- 6. Простой генетический алгоритм
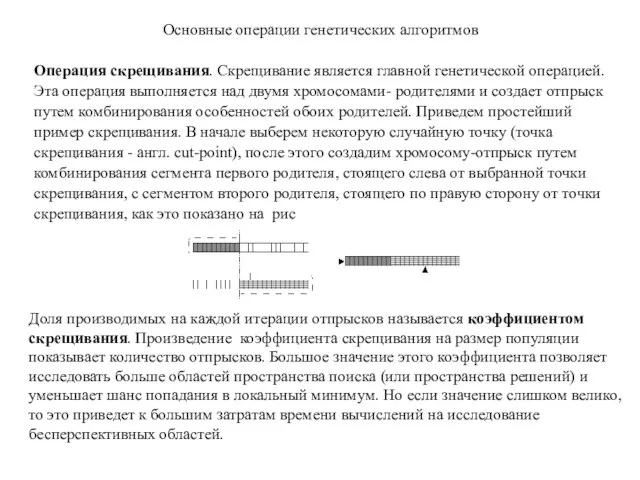
- 7. Основные операции генетических алгоритмов Операция скрещивания. Скрещивание является главной генетической операцией. Эта операция выполняется над двумя
- 8. Операция мутации. Мутация - это фоновая операция, производящая случайное изменение в различных хромосомах. Наипростейший вариант мутации
- 9. Случайный поиск является примером стратегии, которая, наоборот, исследует пространство решений, игнорируя исследование перспективных областей поискового пространства.
- 10. Преимущества генетических алгоритмов Существуют два главных преимущества генетических алгоритмов перед классическими оптимизационными методиками: 1. ГА не
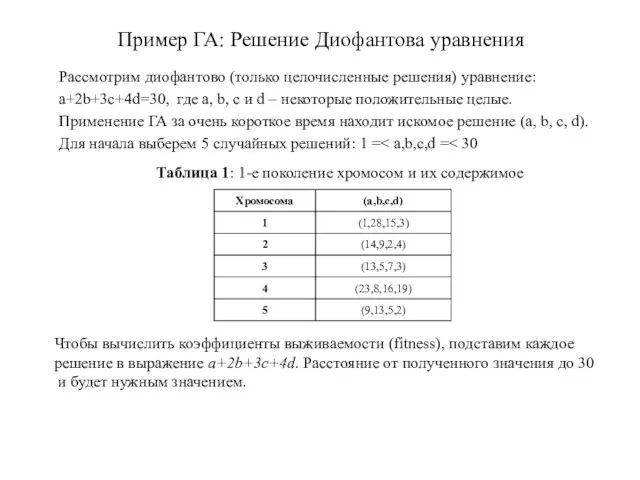
- 11. Пример ГА: Решение Диофантова уравнения Рассмотрим диофантово (только целочисленные решения) уравнение: a+2b+3c+4d=30, где a, b, c
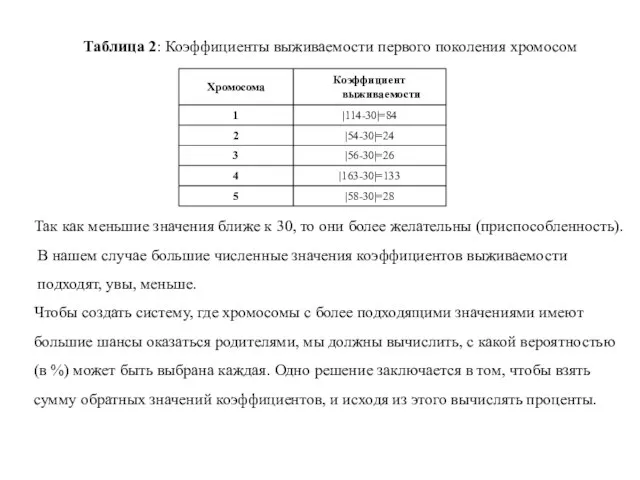
- 12. Таблица 2: Коэффициенты выживаемости первого поколения хромосом Так как меньшие значения ближе к 30, то они
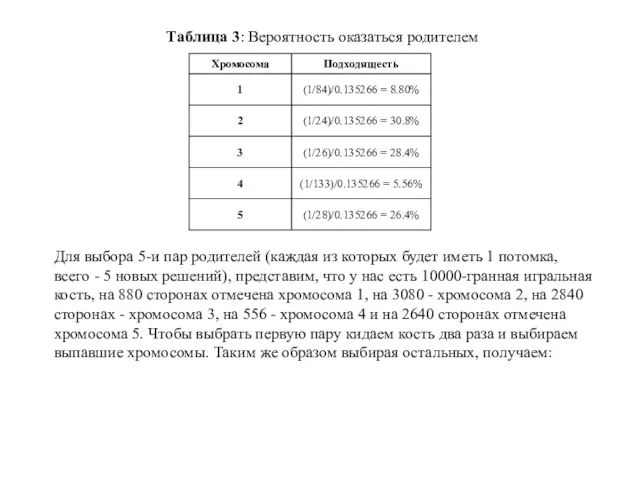
- 13. Таблица 3: Вероятность оказаться родителем Для выбора 5-и пар родителей (каждая из которых будет иметь 1
- 14. Таблица 4: Симуляция выбора родителей Каждый потомок содержит информацию о генах и отца и от матери.
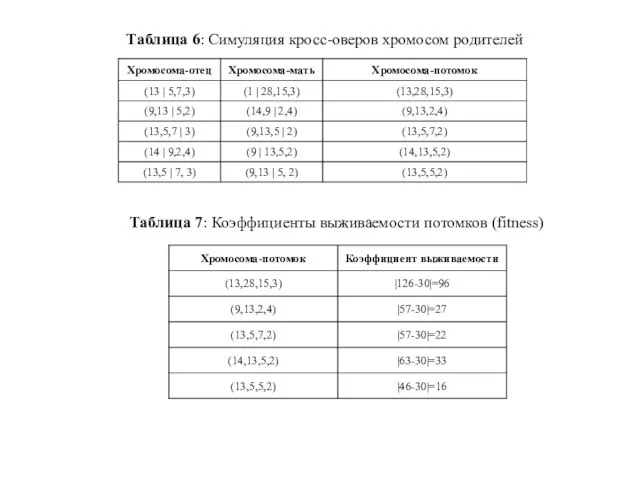
- 15. Таблица 6: Симуляция кросс-оверов хромосом родителей Таблица 7: Коэффициенты выживаемости потомков (fitness)
- 16. Средняя приспособленность (fitness) потомков оказалась 38.8, в то время как у родителей этот коэффициент равнялся 59.4.
- 17. Применение ГА Генетические алгоритмы применяются при разработке программного обеспечения, в системах искусственного интеллекта, оптимизации, искусственных нейронных
- 18. Использование генетических алгоритмов для автоматического формирования программ управления движением автономных реконфигурируемых мехатронно-модульных роботов Совершено самостоятельный аспект
- 19. PolyBot (PARK, Xerox, USA)
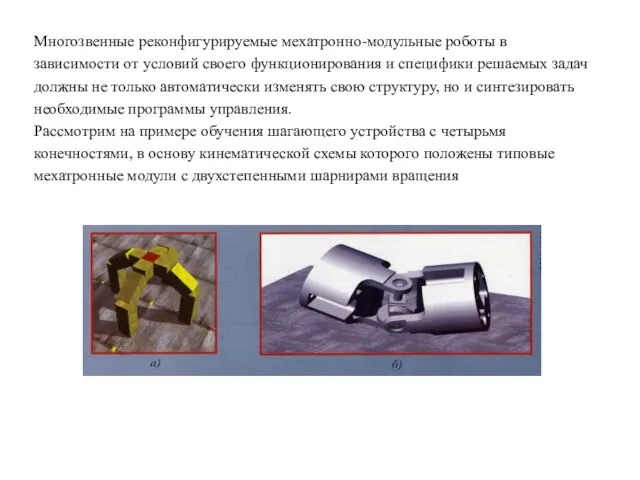
- 20. Многозвенные реконфигурируемые мехатронно-модульные роботы в зависимости от условий своего функционирования и специфики решаемых задач должны не
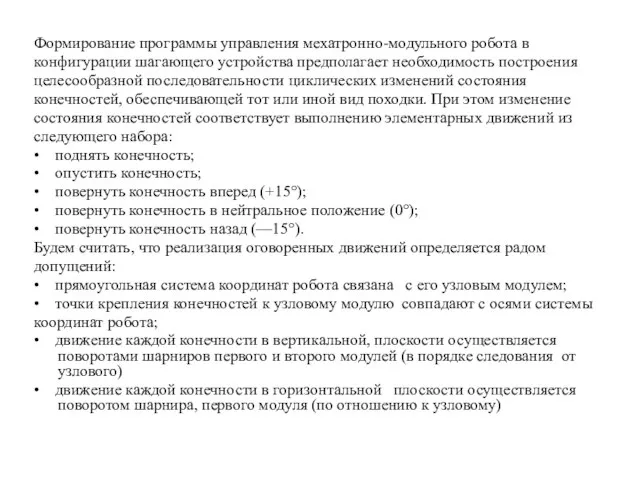
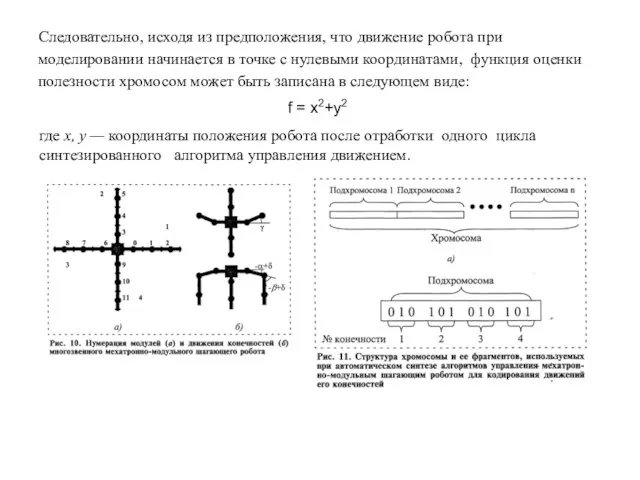
- 21. Формирование программы управления мехатронно-модульного робота в конфигурации шагающего устройства предполагает необходимость построения целесообразной последовательности циклических изменений
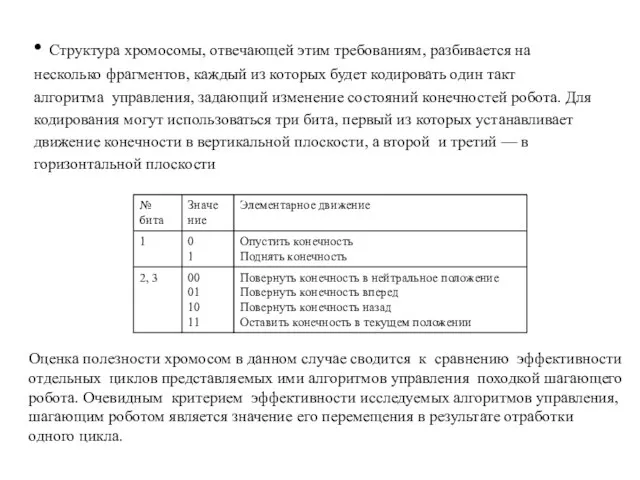
- 22. • Структура хромосомы, отвечающей этим требованиям, разбивается на несколько фрагментов, каждый из которых будет кодировать один
- 23. Следовательно, исходя из предположения, что движение робота при моделировании начинается в точке с нулевыми координатами, функция
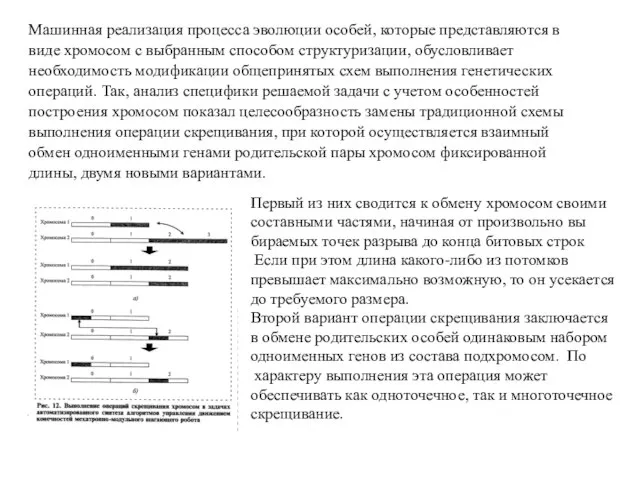
- 24. Машинная реализация процесса эволюции особей, которые представляются в виде хромосом с выбранным способом структуризации, обусловливает необходимость
- 25. Как известно, формирование новой популяции особей в процессе их эволюции осуществляется в результате рекомбинации отобранных хромосом
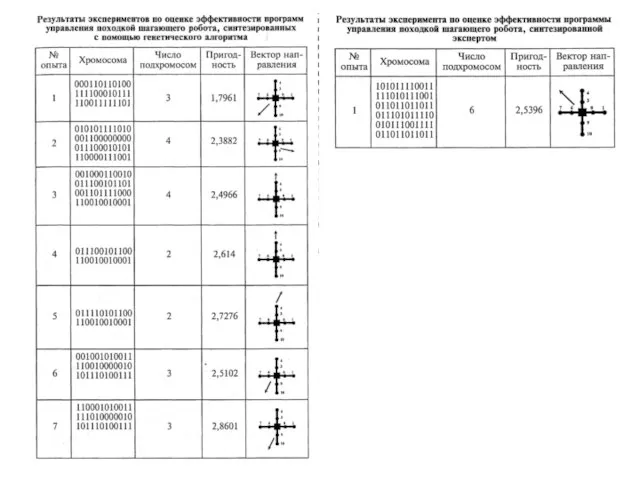
- 27. В ходе выполнения экспериментальных исследований селекция синтезируемых хромосом осуществлялась по методу элитного отбора. Для эмуляции движений
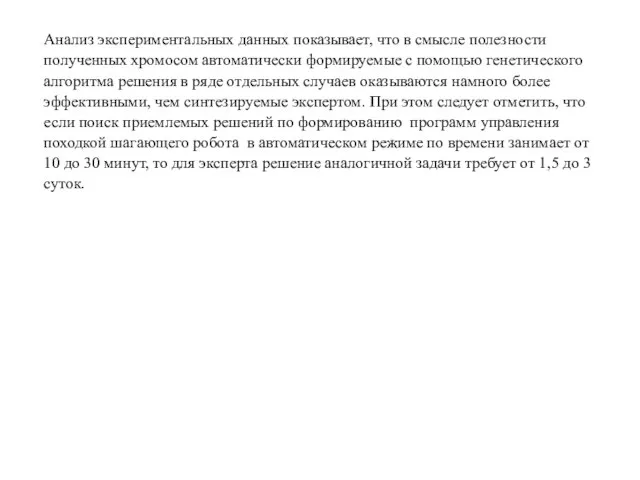
- 29. Анализ экспериментальных данных показывает, что в смысле полезности полученных хромосом автоматически формируемые с помощью генетического алгоритма
- 30. АППАРАТНАЯ РЕАЛИЗАЦИЯ ГЕНЕТИЧЕСКИХ АЛГОРИТМОВ Идея применения генетических алгоритмов в системах автоматизированного проектирования активно развивается наряду с
- 32. Скачать презентацию
Слайд 2Генетические алгоритмы
Понятие генетического алгоритма
Генети́ческий алгори́тм (англ. genetic algorithm) — это эвристический
Генетические алгоритмы
Понятие генетического алгоритма
Генети́ческий алгори́тм (англ. genetic algorithm) — это эвристический
Слайд 3Принцип работы ГА
Задача кодируется таким образом, чтобы её решение могло быть
представлено
Задача кодируется таким образом, чтобы её решение могло быть
представлено
Слайд 4Этапы генетического алгоритма
Создание начальной популяции
Вычисление функций приспособленности для особей популяции (оценивание)
Начало
Этапы генетического алгоритма
Создание начальной популяции
Вычисление функций приспособленности для особей популяции (оценивание)
Начало
Слайд 5Модель «эволюционного процесса»
Модель «эволюционного процесса»

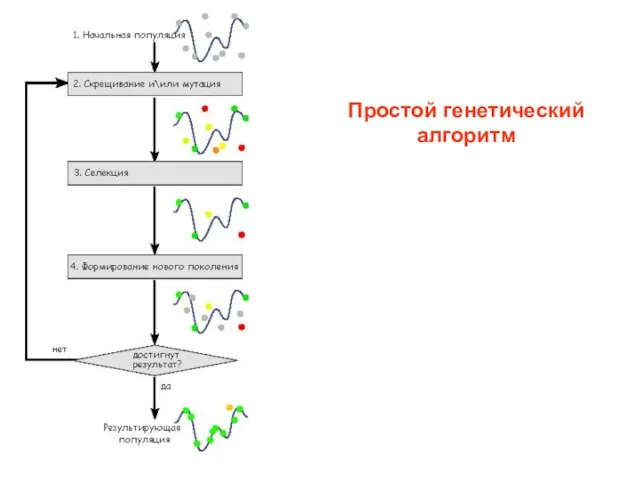
Слайд 6Простой генетический алгоритм
Простой генетический алгоритм
Слайд 7Основные операции генетических алгоритмов
Операция скрещивания. Скрещивание является главной генетической операцией.
Эта операция
Основные операции генетических алгоритмов
Операция скрещивания. Скрещивание является главной генетической операцией.
Эта операция
Слайд 8 Операция мутации. Мутация - это фоновая операция, производящая
случайное изменение в
Операция мутации. Мутация - это фоновая операция, производящая
случайное изменение в
Слайд 9 Случайный поиск является примером стратегии, которая, наоборот, исследует
пространство решений, игнорируя
Случайный поиск является примером стратегии, которая, наоборот, исследует
пространство решений, игнорируя
Слайд 10Преимущества генетических алгоритмов
Существуют два главных преимущества генетических алгоритмов перед
классическими оптимизационными методиками:
1.
Преимущества генетических алгоритмов
Существуют два главных преимущества генетических алгоритмов перед
классическими оптимизационными методиками:
1.
Слайд 11Пример ГА: Решение Диофантова уравнения
Рассмотрим диофантово (только целочисленные решения) уравнение:
a+2b+3c+4d=30, где
Пример ГА: Решение Диофантова уравнения
Рассмотрим диофантово (только целочисленные решения) уравнение:
a+2b+3c+4d=30, где
Слайд 12Таблица 2: Коэффициенты выживаемости первого поколения хромосом
Так как меньшие значения ближе к
Таблица 2: Коэффициенты выживаемости первого поколения хромосом
Так как меньшие значения ближе к
Слайд 13Таблица 3: Вероятность оказаться родителем
Для выбора 5-и пар родителей (каждая из которых будет
Таблица 3: Вероятность оказаться родителем
Для выбора 5-и пар родителей (каждая из которых будет
Слайд 14Таблица 4: Симуляция выбора родителей
Каждый потомок содержит информацию о генах и отца и
Таблица 4: Симуляция выбора родителей
Каждый потомок содержит информацию о генах и отца и
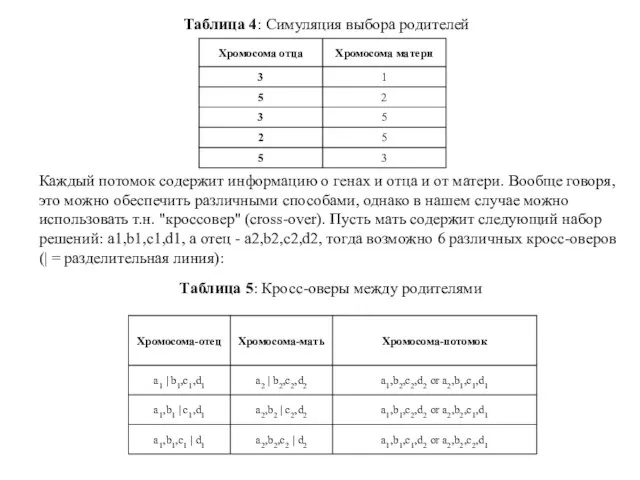
Слайд 15Таблица 6: Симуляция кросс-оверов хромосом родителей
Таблица 7: Коэффициенты выживаемости потомков (fitness)
Таблица 6: Симуляция кросс-оверов хромосом родителей
Таблица 7: Коэффициенты выживаемости потомков (fitness)
Слайд 16 Средняя приспособленность (fitness) потомков оказалась 38.8, в то время как
у
Средняя приспособленность (fitness) потомков оказалась 38.8, в то время как
у
Слайд 17Применение ГА
Генетические алгоритмы применяются при разработке программного
обеспечения, в системах искусственного интеллекта,
Применение ГА
Генетические алгоритмы применяются при разработке программного
обеспечения, в системах искусственного интеллекта,
Слайд 18Использование генетических алгоритмов для автоматического формирования программ управления движением автономных реконфигурируемых мехатронно-модульных
Использование генетических алгоритмов для автоматического формирования программ управления движением автономных реконфигурируемых мехатронно-модульных
Слайд 19PolyBot (PARK, Xerox, USA)
PolyBot (PARK, Xerox, USA)
Слайд 20Многозвенные реконфигурируемые мехатронно-модульные роботы в
зависимости от условий своего функционирования и специфики
Многозвенные реконфигурируемые мехатронно-модульные роботы в
зависимости от условий своего функционирования и специфики
Слайд 21Формирование программы управления мехатронно-модульного робота в
конфигурации шагающего устройства предполагает необходимость построения
Формирование программы управления мехатронно-модульного робота в
конфигурации шагающего устройства предполагает необходимость построения
Слайд 22• Структура хромосомы, отвечающей этим требованиям, разбивается на
несколько фрагментов, каждый из
• Структура хромосомы, отвечающей этим требованиям, разбивается на
несколько фрагментов, каждый из
Слайд 23Следовательно, исходя из предположения, что движение робота при
моделировании начинается в точке
Следовательно, исходя из предположения, что движение робота при
моделировании начинается в точке
Слайд 24Машинная реализация процесса эволюции особей, которые представляются в
виде хромосом с выбранным
Машинная реализация процесса эволюции особей, которые представляются в
виде хромосом с выбранным
Слайд 25Как известно, формирование новой популяции особей в процессе их эволюции
осуществляется в
Как известно, формирование новой популяции особей в процессе их эволюции
осуществляется в

Слайд 27В ходе выполнения экспериментальных исследований селекция синтезируемых хромосом осуществлялась по методу элитного
В ходе выполнения экспериментальных исследований селекция синтезируемых хромосом осуществлялась по методу элитного
Слайд 29Анализ экспериментальных данных показывает, что в смысле полезности
полученных хромосом автоматически формируемые
Анализ экспериментальных данных показывает, что в смысле полезности
полученных хромосом автоматически формируемые
Слайд 30АППАРАТНАЯ РЕАЛИЗАЦИЯ ГЕНЕТИЧЕСКИХ АЛГОРИТМОВ
Идея применения генетических алгоритмов в системах автоматизированного
проектирования активно
АППАРАТНАЯ РЕАЛИЗАЦИЯ ГЕНЕТИЧЕСКИХ АЛГОРИТМОВ
Идея применения генетических алгоритмов в системах автоматизированного
проектирования активно
 Исследование цветозвукового фона стихотворений в среде Microsoft Excel
Исследование цветозвукового фона стихотворений в среде Microsoft Excel Пришвин М.М.
Пришвин М.М. Сутність маркетинговой деятельности
Сутність маркетинговой деятельности  Виды спорта Великобритании. Конные бега
Виды спорта Великобритании. Конные бега ВЫБОР ПРОФЕССИИ – ЭТО СЕРЬЁЗНО
ВЫБОР ПРОФЕССИИ – ЭТО СЕРЬЁЗНО ДЗ (2)
ДЗ (2)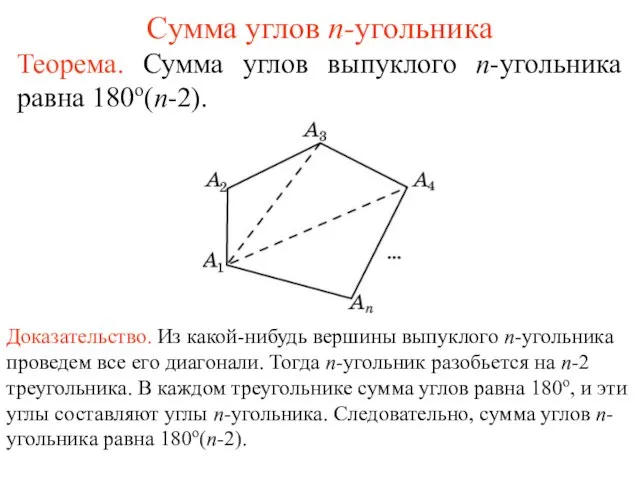 Сумма углов n-угольника
Сумма углов n-угольника Better Cotton (ВС/ТВС). Хлопок из устойчивых источников
Better Cotton (ВС/ТВС). Хлопок из устойчивых источников О моделировании инновационной обучающей среды университета
О моделировании инновационной обучающей среды университета Фармакоэпидемиология
Фармакоэпидемиология Свойства логарифмов
Свойства логарифмов  Характеристика направления «Экономика» (магистратура)
Характеристика направления «Экономика» (магистратура) Анатолий Аксаков Заместитель председателя Комитета Госдумы по кредитным организациям и финансовым рынкам Член Национального ба
Анатолий Аксаков Заместитель председателя Комитета Госдумы по кредитным организациям и финансовым рынкам Член Национального ба ВСЕРОССИЙСКИЙ КОНКУРС ПЕДАГОГИЧЕСКОГО МАСТЕРСТВА "ФОРМУЛА БУДУЩЕГО-2011": ИТОГИ, УРОКИ, ПЕРСПЕКТИВЫ
ВСЕРОССИЙСКИЙ КОНКУРС ПЕДАГОГИЧЕСКОГО МАСТЕРСТВА "ФОРМУЛА БУДУЩЕГО-2011": ИТОГИ, УРОКИ, ПЕРСПЕКТИВЫ Классики о книгах
Классики о книгах Теоремы синусов и косинусов
Теоремы синусов и косинусов  Бизнес-результаты ППФ страхование жизни
Бизнес-результаты ППФ страхование жизни Презентация на тему ЖУК-НОСОРОГ
Презентация на тему ЖУК-НОСОРОГ Задача на подбор сечения
Задача на подбор сечения Сетевые продажи
Сетевые продажи Подпрограмма «Развитие Москвы как Международного финансового центра»
Подпрограмма «Развитие Москвы как Международного финансового центра» О мерах по повышению эффективности международных контейнерных перевозок с использованием Транссибирской магистрали
О мерах по повышению эффективности международных контейнерных перевозок с использованием Транссибирской магистрали Черепаха на острове
Черепаха на острове Посёлок Котельное
Посёлок Котельное Сжатие текста Урок русского языка, 9 класс, подготовка к ГИА 9
Сжатие текста Урок русского языка, 9 класс, подготовка к ГИА 9 Роль отца в воспитании ребенка
Роль отца в воспитании ребенка Управление качеством
Управление качеством синтаксис (1)
синтаксис (1)