- Исследование и разработка тросовых параллельных роботов

Содержание
- 2. Тросовые параллельные роботы (ТРП) – это вид параллельных роботов, в котором звено рабочего органа, подвешен на
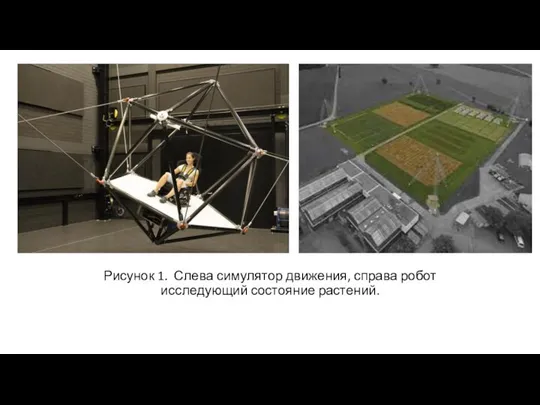
- 3. Рисунок 1. Слева симулятор движения, справа робот исследующий состояние растений.
- 4. Рисунок 2. Справа 3д принтер, слева ScyCam.
- 5. Целью научной работы является исследования и разработка ТПР различной структуры с возможностью практического применения.
- 6. Задачи: Составить математическую модель Провести кинематический и динамический анализ механизма Выполнить расчёты и подбор аппаратуры Провести
- 7. Актуальность: ТПР являются относительно новыми роботами, принципиально отличающимися от классических параллельных роботов. И учитывая их преимущество
- 8. Методы: В исследовании использованы численные методы и методы из теории механизмов и машин.
- 9. Ожидаемые результаты: Создание новых структурных схем ТПР Создание программы управления ТПР Разработка ТПР
- 11. Скачать презентацию
Слайд 3Рисунок 1. Слева симулятор движения, справа робот исследующий состояние растений.
Рисунок 1. Слева симулятор движения, справа робот исследующий состояние растений.
Слайд 4Рисунок 2. Справа 3д принтер, слева ScyCam.
Рисунок 2. Справа 3д принтер, слева ScyCam.

Слайд 5Целью научной работы является исследования и разработка ТПР различной структуры с возможностью
Целью научной работы является исследования и разработка ТПР различной структуры с возможностью
Слайд 6Задачи:
Составить математическую модель
Провести кинематический и динамический анализ механизма
Выполнить расчёты и подбор аппаратуры
Провести
Задачи:
Составить математическую модель
Провести кинематический и динамический анализ механизма
Выполнить расчёты и подбор аппаратуры
Провести
Слайд 7Актуальность:
ТПР являются относительно новыми роботами, принципиально отличающимися от классических параллельных роботов. И
Актуальность:
ТПР являются относительно новыми роботами, принципиально отличающимися от классических параллельных роботов. И
Слайд 8Методы:
В исследовании использованы численные методы и методы из теории механизмов и машин.
Методы:
В исследовании использованы численные методы и методы из теории механизмов и машин.
Слайд 9Ожидаемые результаты:
Создание новых структурных схем ТПР
Создание программы управления ТПР
Разработка ТПР
Ожидаемые результаты:
Создание новых структурных схем ТПР
Создание программы управления ТПР
Разработка ТПР
 Важнейшие классы бинарных соединений «Оксиды»
Важнейшие классы бинарных соединений «Оксиды» Государство и жилищный вопрос. Арендное жилье
Государство и жилищный вопрос. Арендное жилье Организация промышленного производствафотоплитки нового поколения
Организация промышленного производствафотоплитки нового поколения Подгруппа кислорода
Подгруппа кислорода Business Model Innovation
Business Model Innovation warhammer
warhammer Адаптація студентів-першокурсників до навчання в ПНПУ
Адаптація студентів-першокурсників до навчання в ПНПУ Перуанское сообщество в России
Перуанское сообщество в России Луна - спутница Земли
Луна - спутница Земли Плавучесть тел
Плавучесть тел Рекламно-коммуникационная компания «UPGREAT» г.Ростов-на-Дону
Рекламно-коммуникационная компания «UPGREAT» г.Ростов-на-Дону Итоговая анкета тренинга. Шаблон. Сергей Жарков
Итоговая анкета тренинга. Шаблон. Сергей Жарков Профессия строитель
Профессия строитель Сотрудничество Республики Беларусь в рамках СНГ
Сотрудничество Республики Беларусь в рамках СНГ Презентация на тему Первообразная 11 класс
Презентация на тему Первообразная 11 класс Платформа AMD Socket FM2
Платформа AMD Socket FM2 Особенности политической власти в России
Особенности политической власти в России Построение биссектрисы углагеометрия, 7 класс
Построение биссектрисы углагеометрия, 7 класс Полимино
Полимино Продажа недвижимости: земельно-имущественный рекреационный комплекс в г. Петергоф
Продажа недвижимости: земельно-имущественный рекреационный комплекс в г. Петергоф Паразиты: как себя защитить
Паразиты: как себя защитить Становление теории государственного управления
Становление теории государственного управления 60 140 50 140 60 … … + … = … … … 119 0 1 9 9 80.
60 140 50 140 60 … … + … = … … … 119 0 1 9 9 80. Презентация на тему День земли
Презентация на тему День земли Дополнение к финальным протоколам тендеров
Дополнение к финальным протоколам тендеров Методы и технологии управления распределёнными системами
Методы и технологии управления распределёнными системами Описание. Месторасположение. Город: Москва Округ: ЦАО Метро: Электрозаводская Месторасположение: ул. Б. Почтовая, д. 26, стр. 1 Проезд: 1
Описание. Месторасположение. Город: Москва Округ: ЦАО Метро: Электрозаводская Месторасположение: ул. Б. Почтовая, д. 26, стр. 1 Проезд: 1 Определение степени фиброза при хронических заболеваниях печени: сравнение результатов исследований с помощью FibroScan® с биопсией
Определение степени фиброза при хронических заболеваниях печени: сравнение результатов исследований с помощью FibroScan® с биопсией