- История

Содержание
- 2. Механические устройства Абак, Vв., Египет, Древний Рим Соробан, Япония Первыми появились устройства, которые помогали человеку вычислять.
- 3. Механические устройства Аналитическая машина, 1910 г. Чарльз Беббидж (1792-1871) В 1833 г. английский математик Чарльз Беббидж
- 4. Первый программист Постройке аналитической машины Беббидж посвятил последние 37 лет своей жизни, но так и не
- 5. Электронные устройства ЭНИАК, 1945 г. Электронная лампа
- 6. Электронные устройства БЭСМ, 1953 г., СССР Сергей Алексеевич Лебедев (1902 - 1974)
- 7. Электронные устройства Альтаир, 1975 г., США В 1974 году два американских бедных студента в гараже собрали
- 8. Электронные устройства Первый компьютер семейства Apple, 1976 г. Этот компьютер называли «комплектом для домашней сборки», потому
- 9. Современные компьютеры Сегодня компьютеры становятся всё умнее и предоставляют нам всё больше возможностей. Современные компьютеры вычисляют,
- 10. Из истории появления роботов Когда же появились первые роботы? Оказывается, все начиналось с механических кукол, которые
- 11. Другой француз Пьер Жаке-Дроз с большим искусством мастерил человекоподобные устройства, способные выполнять разнообразные действия, например, рисовать
- 12. Роботы 2 поколения Второе поколение создавалось параллельно с внедрением в производство первого поколения роботов. В 1967
- 13. Роботы 3 поколения В конце 70х годов появился новый тип роботов – роботы третьего поколения –
- 14. Последние достижения робототехники QRIO не только может ходить на двух ногах, но и выполнять сложные наборы
- 16. Скачать презентацию
Слайд 2Механические устройства
Абак, Vв.,
Египет, Древний Рим
Соробан, Япония
Первыми появились устройства, которые помогали человеку вычислять.
Механические устройства
Абак, Vв.,
Египет, Древний Рим
Соробан, Япония
Первыми появились устройства, которые помогали человеку вычислять.

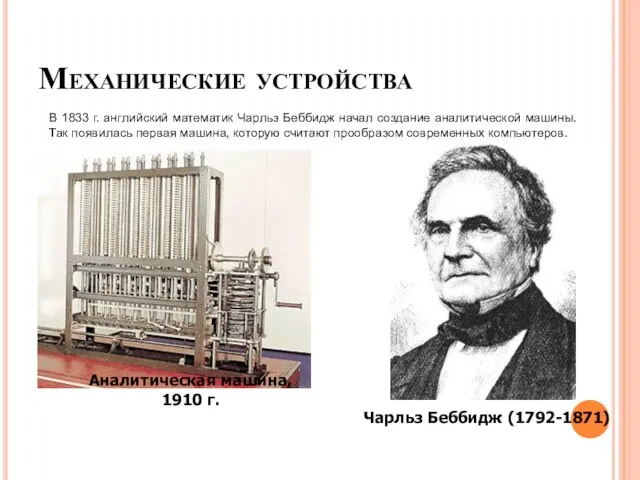
Слайд 3Механические устройства
Аналитическая машина, 1910 г.
Чарльз Беббидж (1792-1871)
В 1833 г. английский математик Чарльз
Механические устройства
Аналитическая машина, 1910 г.
Чарльз Беббидж (1792-1871)
В 1833 г. английский математик Чарльз
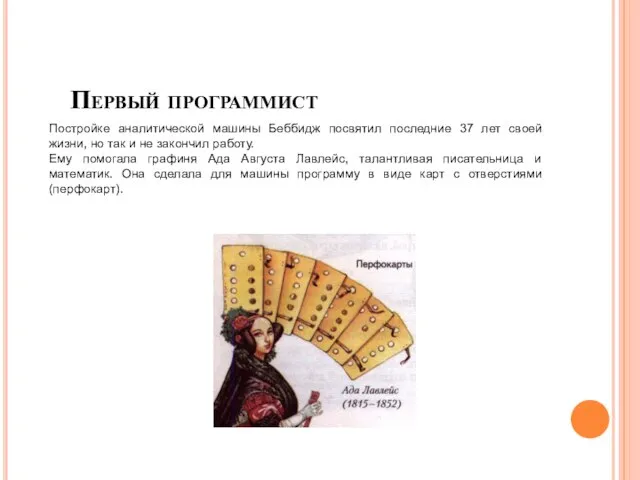
Слайд 4Первый программист
Постройке аналитической машины Беббидж посвятил последние 37 лет своей жизни, но
Первый программист
Постройке аналитической машины Беббидж посвятил последние 37 лет своей жизни, но
Слайд 5
Электронные устройства
ЭНИАК, 1945 г.
Электронная
лампа
Электронные устройства
ЭНИАК, 1945 г.
Электронная
лампа

Слайд 6Электронные устройства
БЭСМ, 1953 г., СССР
Сергей Алексеевич Лебедев
(1902 - 1974)
Электронные устройства
БЭСМ, 1953 г., СССР
Сергей Алексеевич Лебедев
(1902 - 1974)

Слайд 7Электронные устройства
Альтаир, 1975 г., США
В 1974 году два американских бедных студента в
Электронные устройства
Альтаир, 1975 г., США
В 1974 году два американских бедных студента в

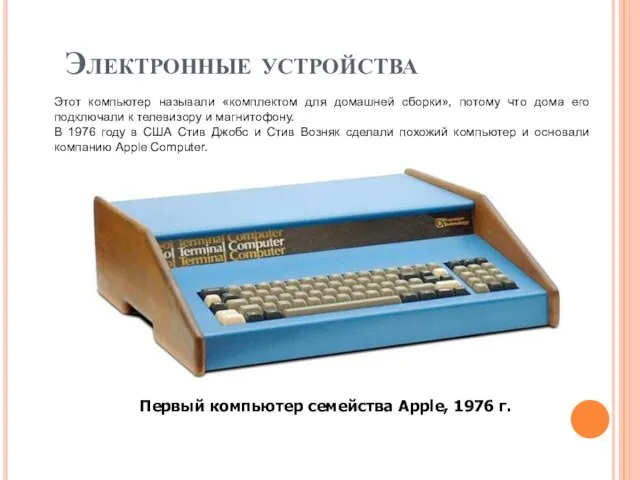
Слайд 8Электронные устройства
Первый компьютер семейства Apple, 1976 г.
Этот компьютер называли «комплектом для домашней
Электронные устройства
Первый компьютер семейства Apple, 1976 г.
Этот компьютер называли «комплектом для домашней
Слайд 9Современные компьютеры
Сегодня компьютеры становятся всё умнее и предоставляют нам всё больше возможностей.
Современные компьютеры
Сегодня компьютеры становятся всё умнее и предоставляют нам всё больше возможностей.
Слайд 10Из истории появления роботов
Когда же появились первые роботы?
Оказывается, все начиналось
Из истории появления роботов
Когда же появились первые роботы?
Оказывается, все начиналось
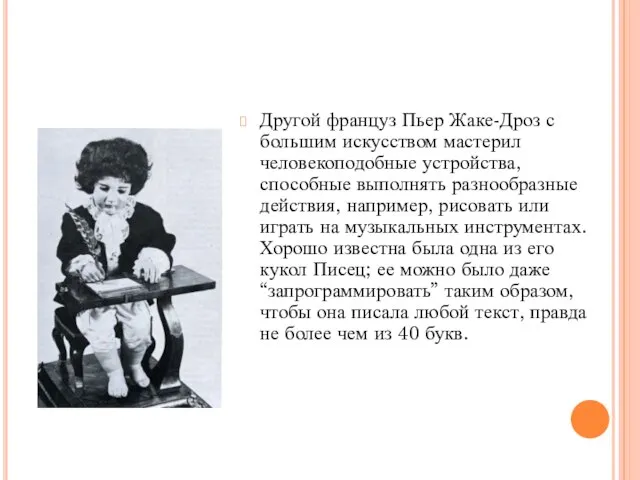
Слайд 11Другой француз Пьер Жаке-Дроз с большим искусством мастерил человекоподобные устройства, способные выполнять
Другой француз Пьер Жаке-Дроз с большим искусством мастерил человекоподобные устройства, способные выполнять
Слайд 12Роботы 2 поколения
Второе поколение создавалось параллельно с внедрением в производство первого поколения
Роботы 2 поколения
Второе поколение создавалось параллельно с внедрением в производство первого поколения
Слайд 13Роботы 3 поколения
В конце 70х годов появился новый тип роботов – роботы
Роботы 3 поколения
В конце 70х годов появился новый тип роботов – роботы

Слайд 14Последние достижения робототехники
QRIO не только может ходить на двух ногах, но
Последние достижения робототехники
QRIO не только может ходить на двух ногах, но
 Ya_vesch_a_ne_chelovek
Ya_vesch_a_ne_chelovek КарелияПрофи. Аутсорсинг в Карелии
КарелияПрофи. Аутсорсинг в Карелии Презентация 3
Презентация 3 Допущенных ошибки водителей, пассажиров пешеходов, которые нельзя совершать
Допущенных ошибки водителей, пассажиров пешеходов, которые нельзя совершать Презентация на тему Агропромышленный комплекс России. Состав и значение.
Презентация на тему Агропромышленный комплекс России. Состав и значение.  Презентация на тему Газообмен в легких и тканях
Презентация на тему Газообмен в легких и тканях Система автоматического полива
Система автоматического полива Презентация на тему Здравствуй школа
Презентация на тему Здравствуй школа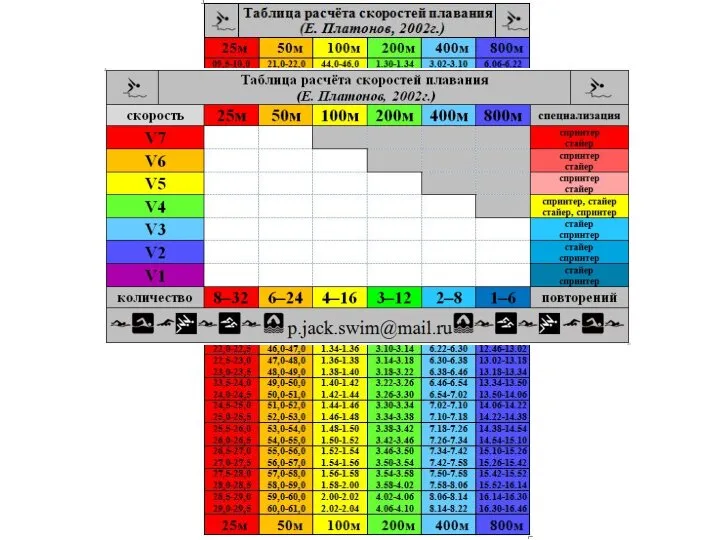 Таблица расчёта скоростей плавания
Таблица расчёта скоростей плавания Закон единства анализа и синтеза
Закон единства анализа и синтеза Организация проектной деятельности младших школьников
Организация проектной деятельности младших школьников Правомерное поведение и правонарушение
Правомерное поведение и правонарушение Нормирование частоты
Нормирование частоты Страдательные причастия настоящего времени
Страдательные причастия настоящего времени судьба ветерана
судьба ветерана ВОПРОС
ВОПРОС Культура речевой коммуникации. (Тема 1)
Культура речевой коммуникации. (Тема 1) МАОУ Школа № 176. Команда Зарничников
МАОУ Школа № 176. Команда Зарничников Презентация Microsoft Office PowerPoint
Презентация Microsoft Office PowerPoint Политическая система и политический режим 11 класс
Политическая система и политический режим 11 класс Викторина к Дню башкирского языка
Викторина к Дню башкирского языка Презентация на тему Информационная сеть
Презентация на тему Информационная сеть  Растворимость веществ. Электролитическая диссоциация. Электролиты и неэлектролиты
Растворимость веществ. Электролитическая диссоциация. Электролиты и неэлектролиты Металлы
Металлы Государственная инспекция по надзору и контролю в сфере образования Пермского края
Государственная инспекция по надзору и контролю в сфере образования Пермского края Чехлы, солнцепылевлагозащитные, для отдыха и дальних поездок
Чехлы, солнцепылевлагозащитные, для отдыха и дальних поездок Экскурсия по Марий Эл
Экскурсия по Марий Эл Человек и человечество (4 класс)
Человек и человечество (4 класс)