- Квадрокоптер

Содержание
- 2. Команда проекта Шалин Даниил Бакулевский Михаил Депрейс Александр Под руководством Александра Большакова Павловича
- 3. Актуальность проекта Существует большое количество квадрокоптеров с ограниченным функционалом. По этой причине было решено изготовить собственный
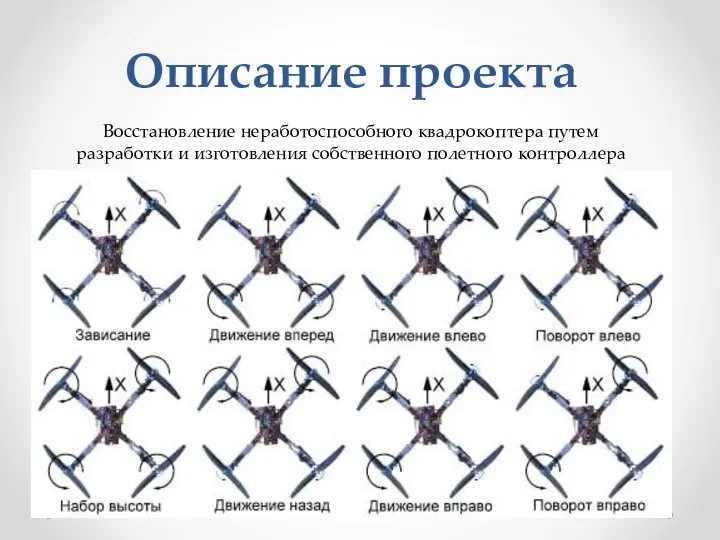
- 4. Описание проекта Восстановление неработоспособного квадрокоптера путем разработки и изготовления собственного полетного контроллера
- 5. Этапы проекта Анализ состояния старого неисправного квадрокоптера Анализ рынка и прототипов Составить план изготовления полетного контроллера
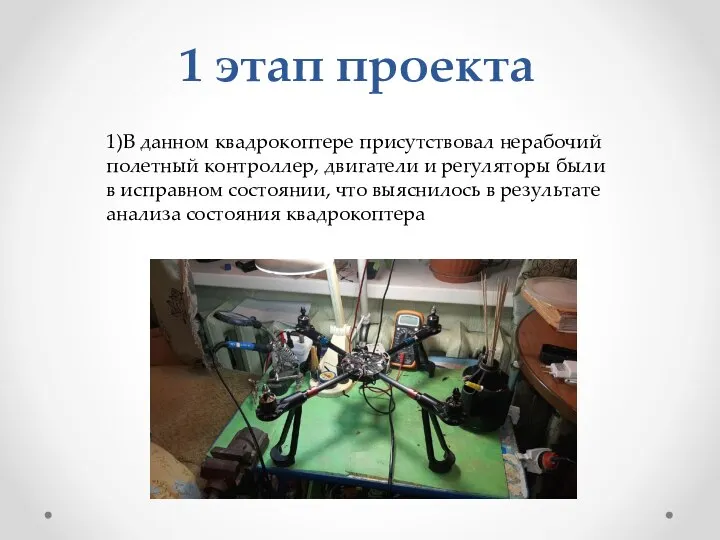
- 6. 1 этап проекта 1)В данном квадрокоптере присутствовал нерабочий полетный контроллер, двигатели и регуляторы были в исправном
- 7. 2 этап проекта Анализ рынка и прототипов
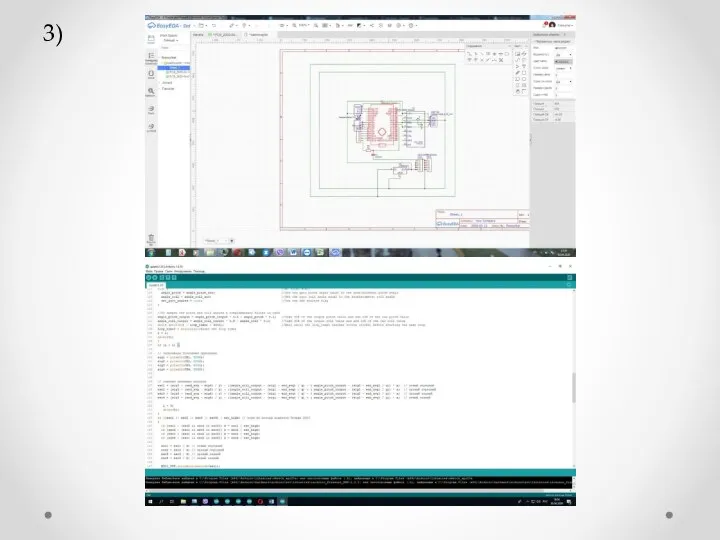
- 8. 3 этап проекта План изготовления полетного контроллера: 1)Подбор аппаратуры для радиоуправления 2)Определение сигнала с выходных каналов
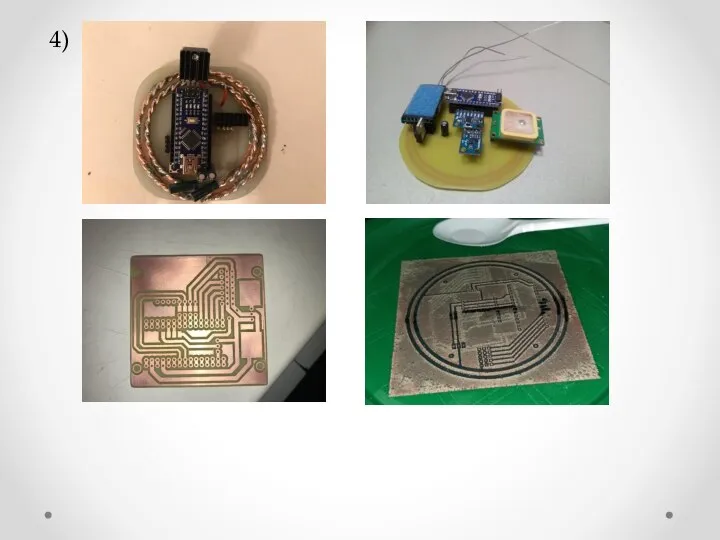
- 9. 4 этап проекта 1) 2)
- 10. 3)
- 11. 4)
- 13. 5 этап проекта
- 14. Преимущества проекта перед аналогами Кастомизация прошивки, дешевизна
- 15. Стоимость комплектующих полетного контроллера Arduino nano - 140 рублей MPU6050 - 50 рублей Второстепенные комплектующие –
- 17. Скачать презентацию
Слайд 2Команда проекта
Шалин Даниил
Бакулевский Михаил
Депрейс Александр
Под руководством
Александра Большакова Павловича
Команда проекта
Шалин Даниил
Бакулевский Михаил
Депрейс Александр
Под руководством
Александра Большакова Павловича
Слайд 3Актуальность проекта
Существует большое количество квадрокоптеров с ограниченным функционалом.
По этой причине было решено
Актуальность проекта
Существует большое количество квадрокоптеров с ограниченным функционалом.
По этой причине было решено
Слайд 4Описание проекта
Восстановление неработоспособного квадрокоптера путем разработки и изготовления собственного полетного контроллера
Описание проекта
Восстановление неработоспособного квадрокоптера путем разработки и изготовления собственного полетного контроллера
Слайд 5Этапы проекта
Анализ состояния старого неисправного квадрокоптера
Анализ рынка и прототипов
Составить план изготовления полетного
Этапы проекта
Анализ состояния старого неисправного квадрокоптера
Анализ рынка и прототипов
Составить план изготовления полетного
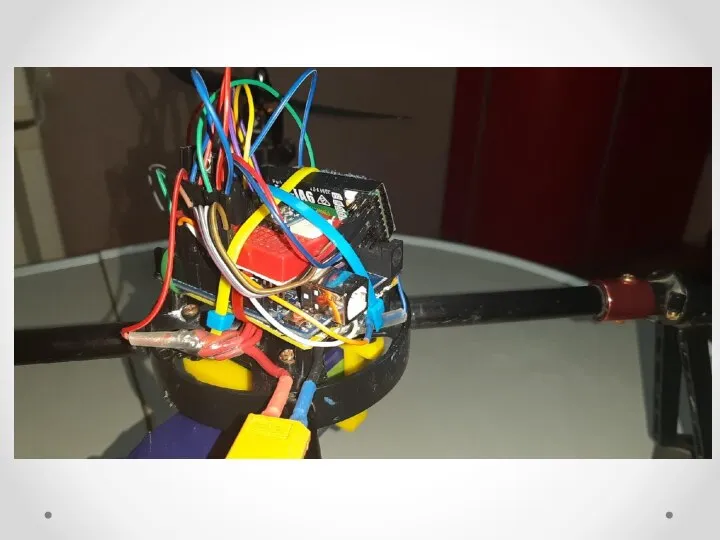
Слайд 61 этап проекта
1)В данном квадрокоптере присутствовал нерабочий полетный контроллер, двигатели и регуляторы
1 этап проекта
1)В данном квадрокоптере присутствовал нерабочий полетный контроллер, двигатели и регуляторы
Слайд 72 этап проекта
Анализ рынка и прототипов
2 этап проекта
Анализ рынка и прототипов

Слайд 83 этап проекта
План изготовления полетного контроллера:
1)Подбор аппаратуры для радиоуправления
2)Определение сигнала с
3 этап проекта
План изготовления полетного контроллера:
1)Подбор аппаратуры для радиоуправления
2)Определение сигнала с
Слайд 94 этап проекта
1)
2)
4 этап проекта
1)
2)

Слайд 103)
3)
Слайд 114)
4)
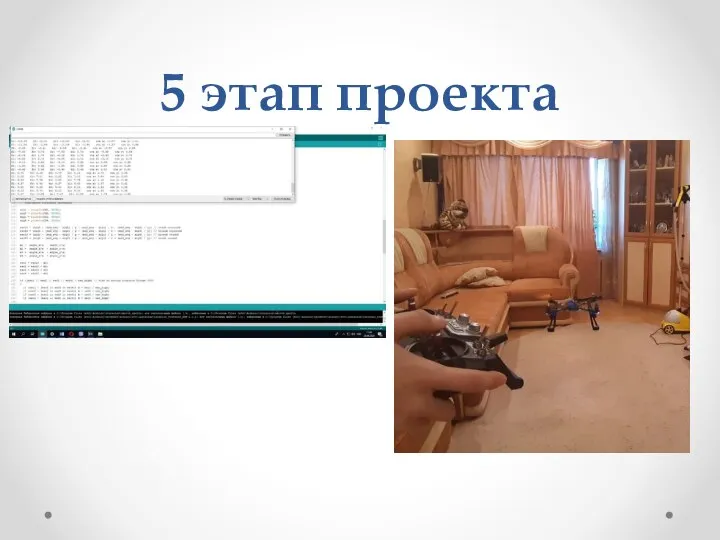
Слайд 135 этап проекта
5 этап проекта
Слайд 14Преимущества проекта перед аналогами
Кастомизация прошивки, дешевизна
Преимущества проекта перед аналогами
Кастомизация прошивки, дешевизна
Слайд 15Стоимость комплектующих полетного контроллера
Arduino nano - 140 рублей
MPU6050 - 50 рублей
Второстепенные комплектующие
Стоимость комплектующих полетного контроллера
Arduino nano - 140 рублей
MPU6050 - 50 рублей
Второстепенные комплектующие
 Абсентеизм
Абсентеизм Формальное исполнение алгоритма
Формальное исполнение алгоритма Региональный Фестиваль-конкурс
Региональный Фестиваль-конкурс Способы получения искусственного холода
Способы получения искусственного холода Презентация на тему Урок Познания мира "Казахстан - страна высокоразвитой культуры"
Презентация на тему Урок Познания мира "Казахстан - страна высокоразвитой культуры" Координация Система лучшая
Координация Система лучшая Цветочные девы и Портрет девушки
Цветочные девы и Портрет девушки Презентация на тему Правильные многогранники и их построение
Презентация на тему Правильные многогранники и их построение Транспорт
Транспорт Лаборатория преобразовательной техники им. К.А. Круга
Лаборатория преобразовательной техники им. К.А. Круга Magnivico. Система диагностики производства искусственным интеллектом
Magnivico. Система диагностики производства искусственным интеллектом ПАРК ПОБЕДЫ
ПАРК ПОБЕДЫ Министерство информатизации и связи Удмуртской Республики
Министерство информатизации и связи Удмуртской Республики Антропологическая лествица образовательных целей и результатов
Антропологическая лествица образовательных целей и результатов ПРОЕКТ« Виртуальный музей школы»Экспозиция «Памятники архитектуры Белгородчины»
ПРОЕКТ« Виртуальный музей школы»Экспозиция «Памятники архитектуры Белгородчины» Организация добровольческого служения
Организация добровольческого служения Кузьминки
Кузьминки КОМБИНИРОВАННАЯ УПАКОВКА 1
КОМБИНИРОВАННАЯ УПАКОВКА 1 Классификация, характеристика и устройство портов
Классификация, характеристика и устройство портов Знаки препинания при однородных членах предложения. Что такое союзы?
Знаки препинания при однородных членах предложения. Что такое союзы? Здоровым быть модно
Здоровым быть модно ПРОИЗВОДСТВЕННЫЕ АВАРИИ
ПРОИЗВОДСТВЕННЫЕ АВАРИИ Вовлечение местного населения в развитие туризма в Катунском биосферном заповеднике как способ адаптации местных сообществ к кли
Вовлечение местного населения в развитие туризма в Катунском биосферном заповеднике как способ адаптации местных сообществ к кли Прием граждан. Материнство и детство
Прием граждан. Материнство и детство Государственное бюджетное образовательное учреждение среднего профессионального образования «Эльхотовский аграрный техникум»
Государственное бюджетное образовательное учреждение среднего профессионального образования «Эльхотовский аграрный техникум» Введение в логистику
Введение в логистику Реформация и контрреформация в Европе XVI в
Реформация и контрреформация в Европе XVI в Судебные прецеденты и практика международных трибуналов в системе МУП
Судебные прецеденты и практика международных трибуналов в системе МУП