- Математические основы компьютерной графики

Содержание
- 2. Компьютерная графика – это к настоящему времени достаточно развитая и многосторонняя отрасль знания. Существует аппаратное и
- 3. История Первые вычислительные машины не имели отдельных средств для работы с графикой, однако уже использовались для
- 4. Математические основы компьютерной графики : Преобразования в двухмерном пространстве Преобразования в трехмерном пространстве Аффинное проецирование Перспективное
- 5. Преобразования в двухмерном пространстве Преобразования в двухмерном пространстве используются в разнообразных случаях: чтобы отдельные части объекта
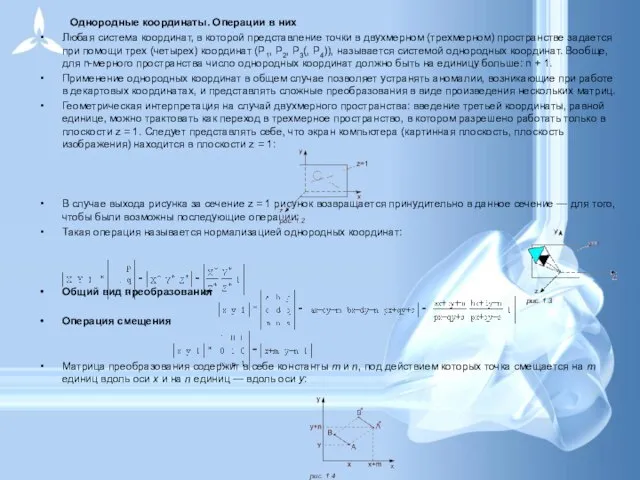
- 6. Однородные координаты. Операции в них Любая система координат, в которой представление точки в двухмерном (трехмерном) пространстве
- 7. Операция масштабирования За счет коэффициентов a и d матрицы преобразования происходит увеличение (или уменьшение) значения координат
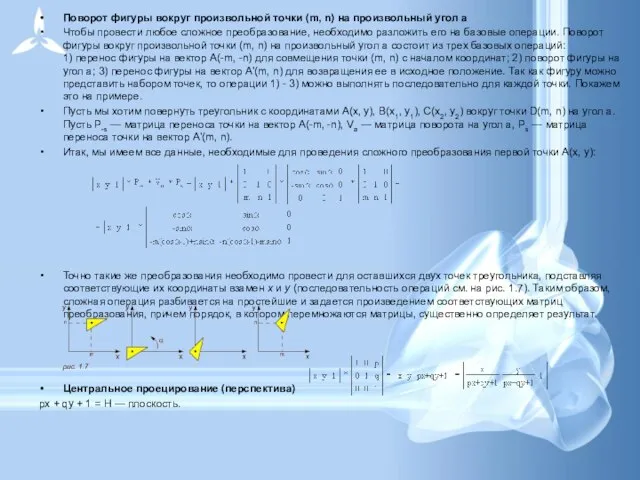
- 8. Поворот фигуры вокруг произвольной точки (m, n) на произвольный угол a Чтобы провести любое сложное преобразование,
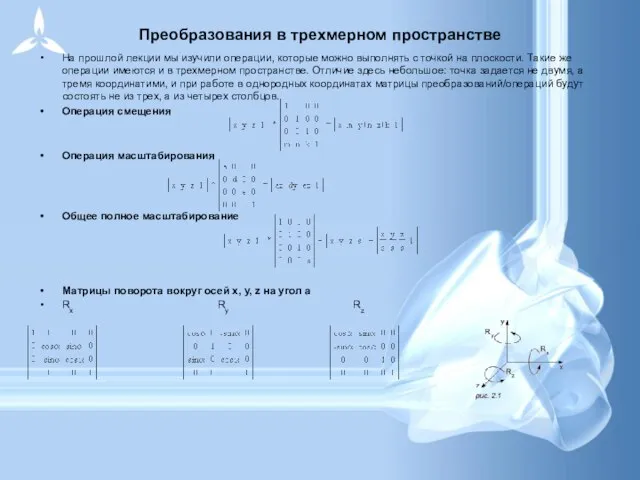
- 9. Преобразования в трехмерном пространстве На прошлой лекции мы изучили операции, которые можно выполнять с точкой на
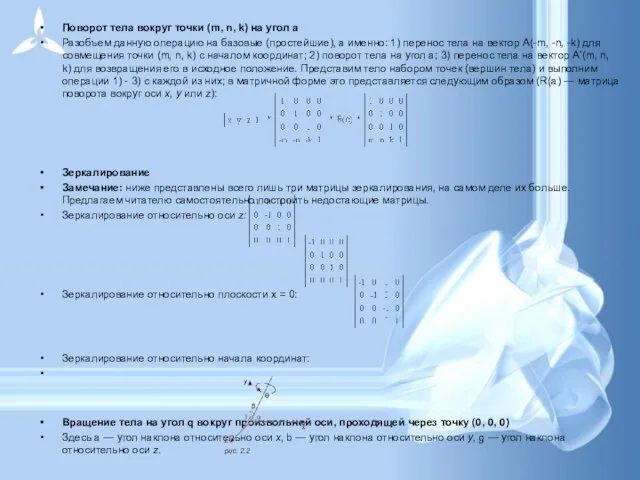
- 10. Поворот тела вокруг точки (m, n, k) на угол a Разобъем данную операцию на базовые (простейшие),
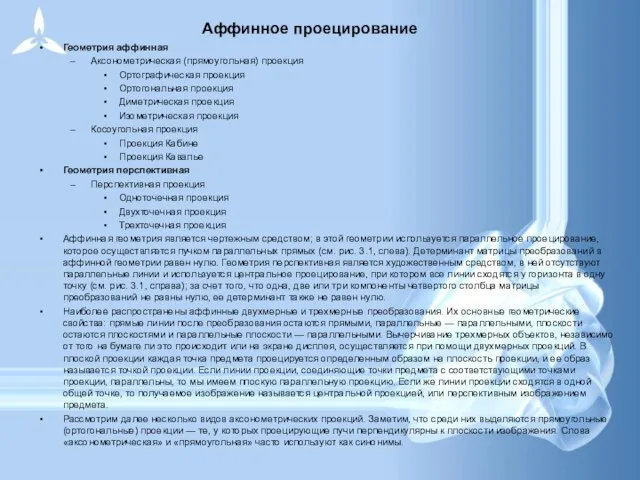
- 11. Аффинное проецирование Геометрия аффинная Аксонометрическая (прямоугольная) проекция Ортографическая проекция Ортогональная проекция Диметрическая проекция Изометрическая проекция Косоугольная
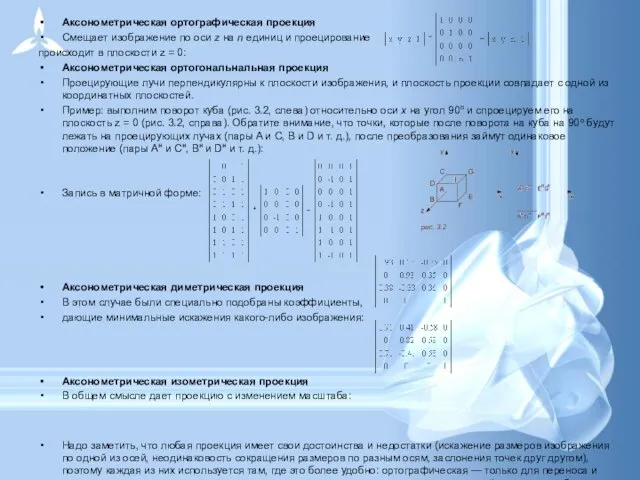
- 12. Аксонометрическая ортографическая проекция Смещает изображение по оси z на n единиц и проецирование происходит в плоскости
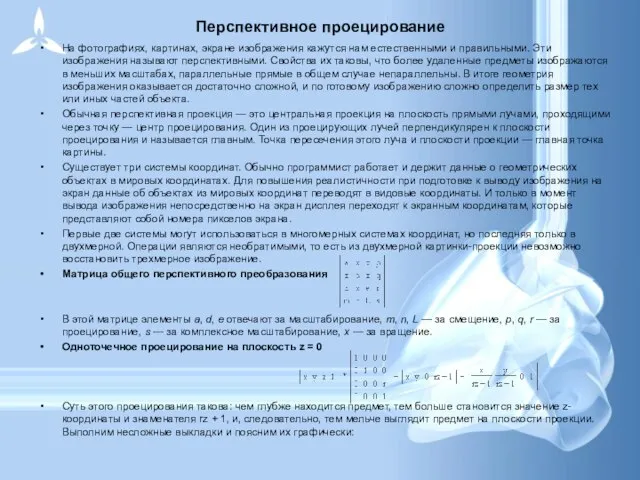
- 13. Перспективное проецирование На фотографиях, картинах, экране изображения кажутся нам естественными и правильными. Эти изображения называют перспективными.
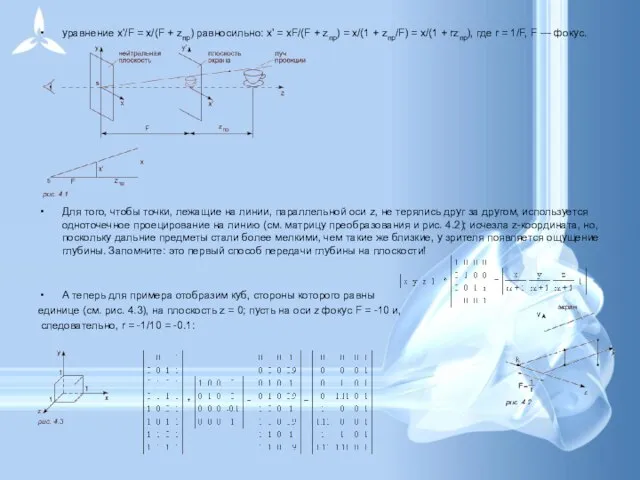
- 14. уравнение x'/F = x/(F + zпр) равносильно: x' = xF/(F + zпр) = x/(1 + zпр/F)
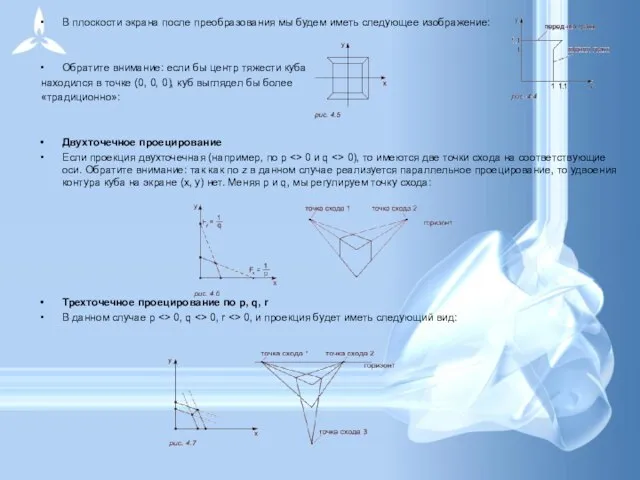
- 15. В плоскости экрана после преобразования мы будем иметь следующее изображение: Обратите внимание: если бы центр тяжести
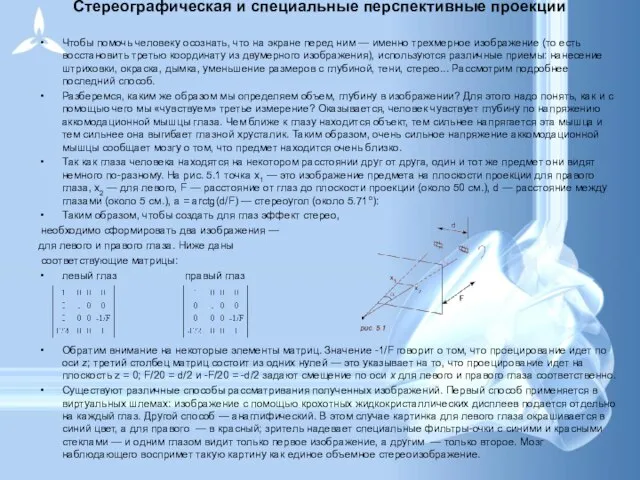
- 16. Стереографическая и специальные перспективные проекции Чтобы помочь человеку осознать, что на экране перед ним — именно
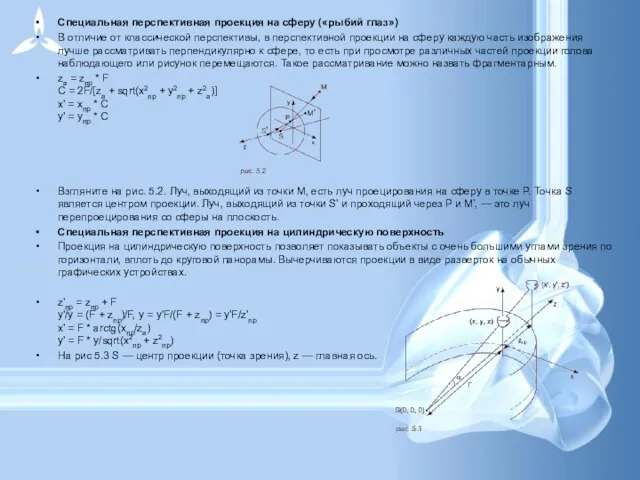
- 17. Специальная перспективная проекция на сферу («рыбий глаз») В отличие от классической перспективы, в перспективной проекции на
- 18. Масштабирование в окне Масштабирование Для того, чтобы выполнить масштабирование, необходимо: задать или определить координаты размера изображения:
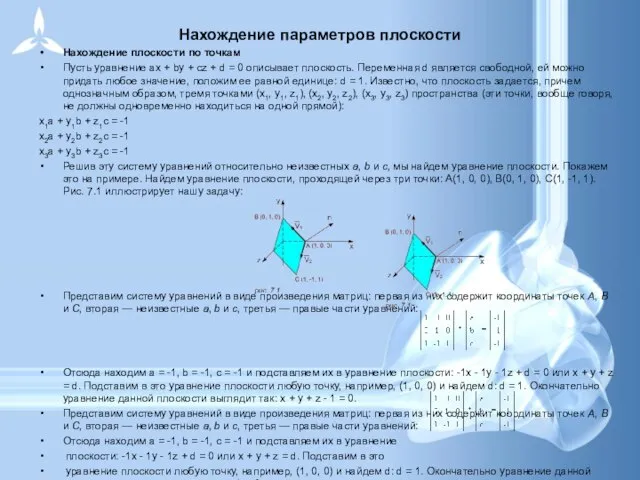
- 19. Нахождение параметров плоскости Нахождение плоскости по точкам Пусть уравнение ax + by + cz + d
- 21. Скачать презентацию
Слайд 3История
Первые вычислительные машины не имели отдельных средств для работы с графикой, однако
История
Первые вычислительные машины не имели отдельных средств для работы с графикой, однако
Слайд 4Математические основы компьютерной графики :
Преобразования в двухмерном пространстве
Преобразования в трехмерном пространстве
Аффинное проецирование
Перспективное
Математические основы компьютерной графики :
Преобразования в двухмерном пространстве
Преобразования в трехмерном пространстве
Аффинное проецирование
Перспективное
Слайд 5Преобразования в двухмерном пространстве
Преобразования в двухмерном пространстве используются в разнообразных случаях: чтобы
Преобразования в двухмерном пространстве
Преобразования в двухмерном пространстве используются в разнообразных случаях: чтобы
Слайд 6 Однородные координаты. Операции в них
Любая система координат, в которой представление точки
Однородные координаты. Операции в них
Любая система координат, в которой представление точки
Слайд 7Операция масштабирования
За счет коэффициентов a и d матрицы преобразования происходит
увеличение (или
Операция масштабирования
За счет коэффициентов a и d матрицы преобразования происходит
увеличение (или

Слайд 8Поворот фигуры вокруг произвольной точки (m, n) на произвольный угол a
Чтобы провести
Поворот фигуры вокруг произвольной точки (m, n) на произвольный угол a
Чтобы провести
Слайд 9Преобразования в трехмерном пространстве
На прошлой лекции мы изучили операции, которые можно выполнять
Преобразования в трехмерном пространстве
На прошлой лекции мы изучили операции, которые можно выполнять
Слайд 10Поворот тела вокруг точки (m, n, k) на угол a
Разобъем данную операцию
Поворот тела вокруг точки (m, n, k) на угол a
Разобъем данную операцию
Слайд 11Аффинное проецирование
Геометрия аффинная
Аксонометрическая (прямоугольная) проекция
Ортографическая проекция
Ортогональная проекция
Диметрическая проекция
Изометрическая проекция
Косоугольная проекция
Проекция Кабине
Проекция Кавалье
Геометрия
Аффинное проецирование
Геометрия аффинная
Аксонометрическая (прямоугольная) проекция
Ортографическая проекция
Ортогональная проекция
Диметрическая проекция
Изометрическая проекция
Косоугольная проекция
Проекция Кабине
Проекция Кавалье
Геометрия
Слайд 12Аксонометрическая ортографическая проекция
Смещает изображение по оси z на n единиц и проецирование
Аксонометрическая ортографическая проекция
Смещает изображение по оси z на n единиц и проецирование
Слайд 13Перспективное проецирование
На фотографиях, картинах, экране изображения кажутся нам естественными и правильными. Эти
Перспективное проецирование
На фотографиях, картинах, экране изображения кажутся нам естественными и правильными. Эти
Слайд 14уравнение x'/F = x/(F + zпр) равносильно: x' = xF/(F + zпр) = x/(1 + zпр/F) = x/(1 + rzпр), где r = 1/F, F — фокус.
Для того, чтобы точки, лежащие
уравнение x'/F = x/(F + zпр) равносильно: x' = xF/(F + zпр) = x/(1 + zпр/F) = x/(1 + rzпр), где r = 1/F, F — фокус.
Для того, чтобы точки, лежащие
Слайд 15В плоскости экрана после преобразования мы будем иметь следующее изображение:
Обратите внимание: если
В плоскости экрана после преобразования мы будем иметь следующее изображение:
Обратите внимание: если
Слайд 16Стереографическая и специальные перспективные проекции
Чтобы помочь человеку осознать, что на экране перед
Стереографическая и специальные перспективные проекции
Чтобы помочь человеку осознать, что на экране перед
Слайд 17Специальная перспективная проекция на сферу («рыбий глаз»)
В отличие от классической перспективы, в
Специальная перспективная проекция на сферу («рыбий глаз»)
В отличие от классической перспективы, в
Слайд 18Масштабирование в окне
Масштабирование
Для того, чтобы выполнить масштабирование, необходимо:
задать или определить координаты
Масштабирование в окне
Масштабирование
Для того, чтобы выполнить масштабирование, необходимо:
задать или определить координаты
Слайд 19Нахождение параметров плоскости
Нахождение плоскости по точкам
Пусть уравнение ax + by + cz
Нахождение параметров плоскости
Нахождение плоскости по точкам
Пусть уравнение ax + by + cz
 Урок презентация Иван Сергеевич Тургенев
Урок презентация Иван Сергеевич Тургенев  VII межвузовская студенческая Олимпиада с международным участием по детской стоматологииг. Москва, 1-3 декабря 2011г.
VII межвузовская студенческая Олимпиада с международным участием по детской стоматологииг. Москва, 1-3 декабря 2011г. KVPU Fundamentalas Bibliotekas alfabetiska kataloga retrospektivas konversijas pieredze
KVPU Fundamentalas Bibliotekas alfabetiska kataloga retrospektivas konversijas pieredze Великие идеологии
Великие идеологии Презентация на тему Зимние Олимпийские игры
Презентация на тему Зимние Олимпийские игры  Учебный предмет
Учебный предмет lecture 6
lecture 6 Черви
Черви Структура двухфазных потоков пароводяной среды при различных параметрах для вертикальной и горизонтальной труб на ТЭС
Структура двухфазных потоков пароводяной среды при различных параметрах для вертикальной и горизонтальной труб на ТЭС Реферат«Трудный путь к победе»(Великая Отечественная война 1941-1945)Выполнила:учащаяся 10 «А» классаМОУ СОШ №40Амелина М.И.Научны
Реферат«Трудный путь к победе»(Великая Отечественная война 1941-1945)Выполнила:учащаяся 10 «А» классаМОУ СОШ №40Амелина М.И.Научны Физкультминутка «Усатый Нянь» Повторяй за нами!
Физкультминутка «Усатый Нянь» Повторяй за нами! Успех в учебе
Успех в учебе Основы управления охраной труда в организации
Основы управления охраной труда в организации Николай Васильевич Гоголь
Николай Васильевич Гоголь Электронная зарядка. На зарядку становись
Электронная зарядка. На зарядку становись УТРО
УТРО Ломоносов
Ломоносов Интеллектуальная игра по английскому языку
Интеллектуальная игра по английскому языку Круглый стол «Организация урочной деятельности в условиях внедрения ФГОС НОО» Казлаускас Татьяна Васильевна, заместитель дире
Круглый стол «Организация урочной деятельности в условиях внедрения ФГОС НОО» Казлаускас Татьяна Васильевна, заместитель дире Основы композиции
Основы композиции Мотивационное управление
Мотивационное управление Семинар 1. Знакомство с языками программирования
Семинар 1. Знакомство с языками программирования Виды велосипедов
Виды велосипедов Аннотация проекта
Аннотация проекта Фильм Оствинд 2
Фильм Оствинд 2 Инфекционная больница Калининградской области
Инфекционная больница Калининградской области Компьютер и ПО
Компьютер и ПО ПО «Николаевка»
ПО «Николаевка»