- Методика построения адаптивной модели определения движения КА Cергиевский А.Н. ФГУП ЦНИИ “Комета”

Содержание
- 2. Постановка задачи Имеется. Решается задача Коши для высокоэллиптического КА с периодом обращения ~ 12 часов. Начальные
- 3. Методика решения задачи. Методика построения адаптивной модели определения движения космического аппарата (КА) может быть заключаться в
- 4. На проверочной выборке (которая может быть объединена с обучающей) строится (адекватная) модель прогноза движения КА методом
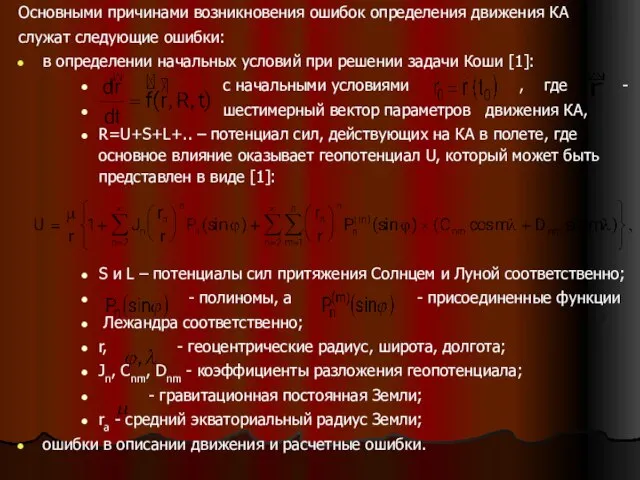
- 5. Основными причинами возникновения ошибок определения движения КА служат следующие ошибки: в определении начальных условий при решении
- 6. Ошибки определения начальных условий обусловлены в свою очередь ошибками измерителя (погрешностей измерений и неточностью координатной привязки
- 7. Задача поиска вектора компенсирующих поправок (как при поиске расширенного вектора состояния , где - вектор “мешающих”
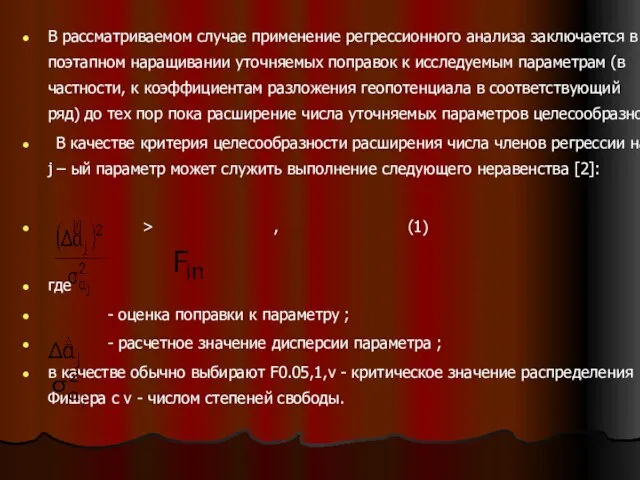
- 8. В рассматриваемом случае применение регрессионного анализа заключается в поэтапном наращивании уточняемых поправок к исследуемым параметрам (в
- 9. После выбора совокупности параметров, для которых для которых удовлетворяется правило (1) включения по одиночке в расширяемый
- 10. Часто в качестве критериев, позволяющих сделать выбор «наилучшей» (по определению Д.Химмельблау) модели из нескольких возможных или
- 12. Скачать презентацию
Слайд 2Постановка задачи
Имеется. Решается задача Коши для высокоэллиптического КА с периодом обращения ~
Постановка задачи
Имеется. Решается задача Коши для высокоэллиптического КА с периодом обращения ~
Слайд 3Методика решения задачи.
Методика построения адаптивной модели определения движения космического аппарата (КА) может
Методика решения задачи.
Методика построения адаптивной модели определения движения космического аппарата (КА) может
Слайд 4На проверочной выборке (которая может быть объединена с обучающей) строится (адекватная) модель
На проверочной выборке (которая может быть объединена с обучающей) строится (адекватная) модель
Слайд 5Основными причинами возникновения ошибок определения движения КА
служат следующие ошибки:
в определении начальных условий
Основными причинами возникновения ошибок определения движения КА
служат следующие ошибки:
в определении начальных условий
Слайд 6Ошибки определения начальных условий обусловлены в свою очередь ошибками измерителя (погрешностей измерений
Ошибки определения начальных условий обусловлены в свою очередь ошибками измерителя (погрешностей измерений
Слайд 7Задача поиска вектора компенсирующих поправок (как при поиске расширенного вектора состояния ,
Задача поиска вектора компенсирующих поправок (как при поиске расширенного вектора состояния ,
Слайд 8В рассматриваемом случае применение регрессионного анализа заключается в поэтапном наращивании уточняемых поправок
В рассматриваемом случае применение регрессионного анализа заключается в поэтапном наращивании уточняемых поправок
Слайд 9После выбора совокупности параметров, для которых для которых удовлетворяется правило (1) включения
После выбора совокупности параметров, для которых для которых удовлетворяется правило (1) включения
Слайд 10Часто в качестве критериев, позволяющих сделать выбор «наилучшей» (по определению Д.Химмельблау) модели
Часто в качестве критериев, позволяющих сделать выбор «наилучшей» (по определению Д.Химмельблау) модели
 Атомно-абсорбционная спектроскопия
Атомно-абсорбционная спектроскопия История возникновения числа
История возникновения числа НДФЛ. Заработная плата (оплата труда работника)
НДФЛ. Заработная плата (оплата труда работника) Презентация на тему Русский интуитивизм
Презентация на тему Русский интуитивизм Лекция 3
Лекция 3 Системный блок
Системный блок Вклад ученых-физиков в дело Великой Победы
Вклад ученых-физиков в дело Великой Победы От детства к зрелости. Воспитание ребенка в семье
От детства к зрелости. Воспитание ребенка в семье Классификация цепей поставок и их краткая характеристика Ненадышина Т., Губанова М.
Классификация цепей поставок и их краткая характеристика Ненадышина Т., Губанова М. Изучение готовности первоклассников к обучению в школе
Изучение готовности первоклассников к обучению в школе Is it good to be young
Is it good to be young  О едином подходе к формированию ОК-компетенций в области Техники и технологии
О едином подходе к формированию ОК-компетенций в области Техники и технологии Презентация на тему Грибы - двойники
Презентация на тему Грибы - двойники безопасность
безопасность Счастливые отношения в семье. Вводный вебинар
Счастливые отношения в семье. Вводный вебинар ОГП тема 3
ОГП тема 3 Презентация на тему Тип Кольчатые черви
Презентация на тему Тип Кольчатые черви Информационный проект нового поколения
Информационный проект нового поколения «Национальное бесконечно богато…» Д.С. Лихачёв
«Национальное бесконечно богато…» Д.С. Лихачёв Школьная ассоциация нового самоуправления
Школьная ассоциация нового самоуправления Тест по теме: «Столетняя война»
Тест по теме: «Столетняя война» Продаем 3-комнатную квартиру в Омске
Продаем 3-комнатную квартиру в Омске Печать автомобильных деталей на 3D-принтере
Печать автомобильных деталей на 3D-принтере Привлечение финансирования через ЗПИФ
Привлечение финансирования через ЗПИФ Проблемные кредиты – итальянский опыт
Проблемные кредиты – итальянский опыт Как выбрать инструмент для решения проблемы
Как выбрать инструмент для решения проблемы Презентация на тему Развивающее обучение что это такое
Презентация на тему Развивающее обучение что это такое  Предпринимательство и предприниматель
Предпринимательство и предприниматель