- Миэкроэлектромеханические системы

Содержание
- 2. Датчики расстояния Датчики расстояния — это устройства, выходной сигнал которых представляет собой информацию о расстоянии до
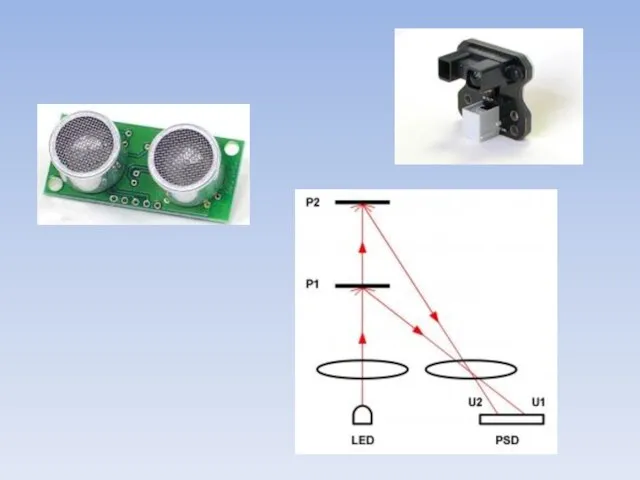
- 4. Для оценки расстояния до объекта служат ультразвуковые (ultrasonic range finder), а также оптические инфракрасные (IR range
- 6. Датчик скорости Пожалуй, самыми «трендовыми» из MEMS-сенсоров являются датчики движения. Они в последнее время постоянно на
- 7. На сегодняшний день наиболее популярны датчики движения, основанные на конденсаторном принципе. Подвижная часть системы – классический
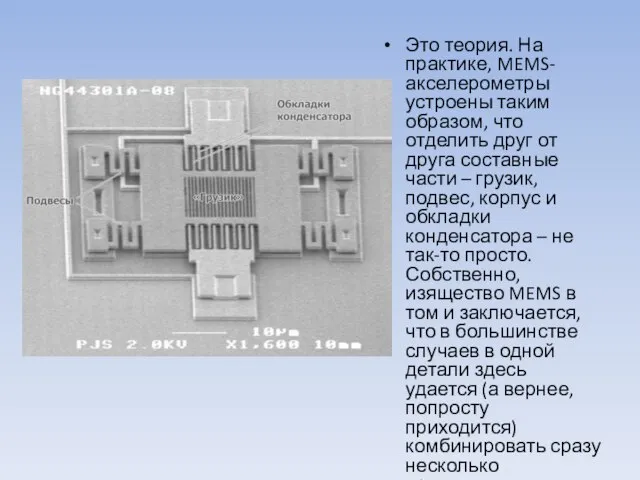
- 8. Это теория. На практике, MEMS-акселерометры устроены таким образом, что отделить друг от друга составные части –
- 10. Датчики движения Датчики, выполненные по технологии МЭМС, изготавливаются с помощью тех же технологических приемов, что и
- 11. Использование вертикальной конструкции для стыковки двух кристаллов
- 12. Принцип работы МЭМС-сенсора движения Принцип работы сенсоров движения (акселерометров и гироскопов) основан на измерении смещения инерционной
- 13. Топология МЭМС-сенсора В конструкции МЭМС-сенсоров для акселерометров и гироскопов используется камертонная система электродов. Две подвешенные массы
- 14. Литература http://www.russianelectronics.ru/leader-r/review/2193/doc/48456/ https://3dnews.ru/600098 https://sites.google.com/site/poprobotics/ideologia/sensor
- 16. Скачать презентацию
Слайд 2Датчики расстояния
Датчики расстояния — это устройства, выходной сигнал которых представляет собой информацию
Датчики расстояния
Датчики расстояния — это устройства, выходной сигнал которых представляет собой информацию
Слайд 4Для оценки расстояния до объекта служат ультразвуковые (ultrasonic range finder), а также оптические инфракрасные (IR
Для оценки расстояния до объекта служат ультразвуковые (ultrasonic range finder), а также оптические инфракрасные (IR
Слайд 6Датчик скорости
Пожалуй, самыми «трендовыми» из MEMS-сенсоров являются датчики движения. Они в последнее
Датчик скорости
Пожалуй, самыми «трендовыми» из MEMS-сенсоров являются датчики движения. Они в последнее
Слайд 7 На сегодняшний день наиболее популярны датчики движения, основанные на конденсаторном принципе.
На сегодняшний день наиболее популярны датчики движения, основанные на конденсаторном принципе.

Слайд 8Это теория. На практике, MEMS-акселерометры устроены таким образом, что отделить друг от
Это теория. На практике, MEMS-акселерометры устроены таким образом, что отделить друг от
Слайд 10Датчики движения
Датчики, выполненные по технологии МЭМС, изготавливаются с помощью тех же технологических
Датчики движения
Датчики, выполненные по технологии МЭМС, изготавливаются с помощью тех же технологических
Слайд 11 Использование вертикальной конструкции для стыковки двух кристаллов
Использование вертикальной конструкции для стыковки двух кристаллов

Слайд 12Принцип работы МЭМС-сенсора движения
Принцип работы сенсоров движения (акселерометров и гироскопов) основан на
Принцип работы МЭМС-сенсора движения
Принцип работы сенсоров движения (акселерометров и гироскопов) основан на
Слайд 13 Топология МЭМС-сенсора
В конструкции МЭМС-сенсоров для акселерометров и гироскопов используется камертонная система электродов.
Топология МЭМС-сенсора
В конструкции МЭМС-сенсоров для акселерометров и гироскопов используется камертонная система электродов.

Слайд 14Литература
http://www.russianelectronics.ru/leader-r/review/2193/doc/48456/
https://3dnews.ru/600098
https://sites.google.com/site/poprobotics/ideologia/sensor
Литература
http://www.russianelectronics.ru/leader-r/review/2193/doc/48456/
https://3dnews.ru/600098
https://sites.google.com/site/poprobotics/ideologia/sensor
 Догосударственный период в истории восточных славян
Догосударственный период в истории восточных славян Предельные одноосновные карбоновые кислоты
Предельные одноосновные карбоновые кислоты В.И. Гау. Николай I на смертном одре.
В.И. Гау. Николай I на смертном одре. Як оплатити рахунки через інтернет? СЕРВІСИ САЙТУ DOMIVKA.IF.UA
Як оплатити рахунки через інтернет? СЕРВІСИ САЙТУ DOMIVKA.IF.UA Нурсултан Назарбаев
Нурсултан Назарбаев  Тестовая презентация
Тестовая презентация Природно-ресурсный потенциал равнинных территорий
Природно-ресурсный потенциал равнинных территорий ДЕМОГРАФИЧЕСКАЯ СИТУАЦИЯ В РОССИЙСКОЙ ФЕДЕРАЦИИ. УРОК ОБЩЕСТВОЗНАНИЯ В 11 КЛАССЕ. ПРОФИЛЬНЫЙ УРОВЕНЬ. УЧИТЕЛЬ СМИРНОВ ЕВГЕНИЙ
ДЕМОГРАФИЧЕСКАЯ СИТУАЦИЯ В РОССИЙСКОЙ ФЕДЕРАЦИИ. УРОК ОБЩЕСТВОЗНАНИЯ В 11 КЛАССЕ. ПРОФИЛЬНЫЙ УРОВЕНЬ. УЧИТЕЛЬ СМИРНОВ ЕВГЕНИЙ Чем отличается малый бизнес от бизнеса большого?
Чем отличается малый бизнес от бизнеса большого? Природа и структура конфликта
Природа и структура конфликта Дни Крыма в Харькове семинар для врачей пресс-конференция в Харьковской обл. администрации.
Дни Крыма в Харькове семинар для врачей пресс-конференция в Харьковской обл. администрации. Организация деятельности
Организация деятельности Режиссёрские приёмы в творчестве Роберта Родригеса
Режиссёрские приёмы в творчестве Роберта Родригеса фемпикник
фемпикник Процессный подход
Процессный подход  Учитель начальных классов второй квалификационной категории МОУ «Средняя общеобразовательная школа 3 р.п. Линёво»
Учитель начальных классов второй квалификационной категории МОУ «Средняя общеобразовательная школа 3 р.п. Линёво» ПЛЮСЫ И МИНУСЫсъедобных сувениров
ПЛЮСЫ И МИНУСЫсъедобных сувениров Рубежная диагностическая работа
Рубежная диагностическая работа Tibbi-Sosial Ekspertiza Komissiyalarının həkim heyətinin imtahan nəticələrinin analizi
Tibbi-Sosial Ekspertiza Komissiyalarının həkim heyətinin imtahan nəticələrinin analizi Презентация на тему Мастера печатных дел (4 класс)
Презентация на тему Мастера печатных дел (4 класс) Изготовление контактных линз
Изготовление контактных линз Кислоты 8 класс
Кислоты 8 класс Диета
Диета Тайны Японских Гейш
Тайны Японских Гейш Технология саморазвития личности
Технология саморазвития личности Презентация 13
Презентация 13 Инновационность педагогических технологий и учебно-методических материалов для обучения иностранному языку в неязыковом вузе
Инновационность педагогических технологий и учебно-методических материалов для обучения иностранному языку в неязыковом вузе Доступный уровень интерактивной коммуникациипроекторы с короткофокусным объективомMitsubishi XD365U-EST и WD385U-EST
Доступный уровень интерактивной коммуникациипроекторы с короткофокусным объективомMitsubishi XD365U-EST и WD385U-EST