Моделирование космических роботов с помощью пакета MRDS??MRDS?????????(??????????) (Microsoft Robotics Developer Studio)
- Моделирование космических роботов с помощью пакета MRDS??MRDS?????????(??????????) (Microsoft Robotics Developer Studio)

Содержание
- 2. Цель работы : 工作目的 : рассмотреть основные проблемы информатизации различных отраслей современной техники 考察现代技术各个分支信息的基本问题 исследовать инновации
- 3. Симуляция робота и окружения в MRDS 在MRDS 中,机器人和环境的仿真
- 4. Программирование космических роботов делится на 空间机器人编程分为以下几个方面: Online – программирование 在线(Online) – 编程 Offline – программирование 离线(Offline)
- 5. Примеры обстановок в среде моделирования 在模型环境下环境的事例: Простой моделируемый робот (Simple Simulated Robot) 一个简单的模拟机器人 (Simple Simulated Robot)
- 6. Примеры обстановок в среде моделирования 在模拟环境下的环境事例: Квартира (Apartment Environment) 公寓(Apartment Environment) Моделирование Pioneer 3DX (Pioneer 3DX
- 7. Примеры обстановок в среде моделирования: 在模拟环境下的环境事例: Современный дом (ModernHouse) 现代住房 (ModernHouse) Естественная обстановка (Outdoor Environment) 自然环境
- 8. Примеры обстановок в среде моделирования 在模拟环境下的环境事例: Моделирование сопротивления воздуха (Simulated Air Resistance) 空气阻力的模拟 (Simulated Air Resistance)
- 9. Доступное обновление данных Wall. Wall数据的可用更新.
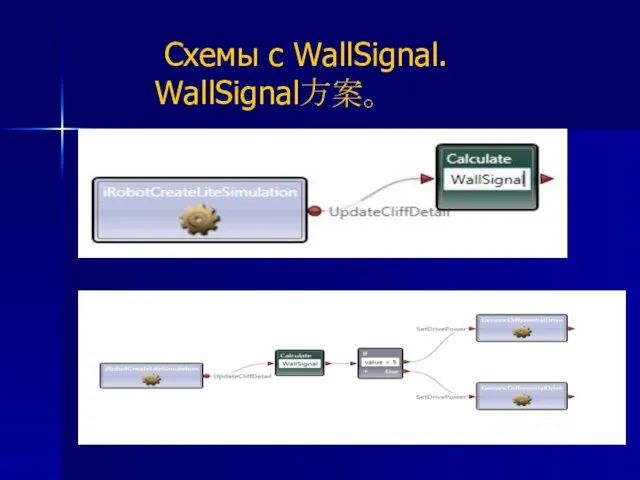
- 10. Схемы с WallSignal. WallSignal方案。
- 12. Скачать презентацию
Слайд 2Цель работы :
工作目的 :
рассмотреть основные проблемы информатизации различных отраслей современной техники
考察现代技术各个分支信息的基本问题
исследовать
Цель работы :
工作目的 :
рассмотреть основные проблемы информатизации различных отраслей современной техники
考察现代技术各个分支信息的基本问题
исследовать
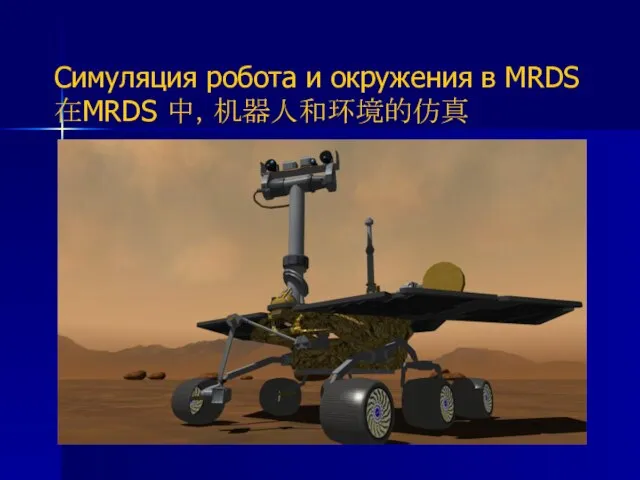
Слайд 3Симуляция робота и окружения в MRDS
在MRDS 中,机器人和环境的仿真
Симуляция робота и окружения в MRDS
在MRDS 中,机器人和环境的仿真
Слайд 4Программирование космических роботов делится на
空间机器人编程分为以下几个方面:
Online – программирование
在线(Online) – 编程
Offline – программирование
离线(Offline)
Программирование космических роботов делится на
空间机器人编程分为以下几个方面:
Online – программирование
在线(Online) – 编程
Offline – программирование
离线(Offline)
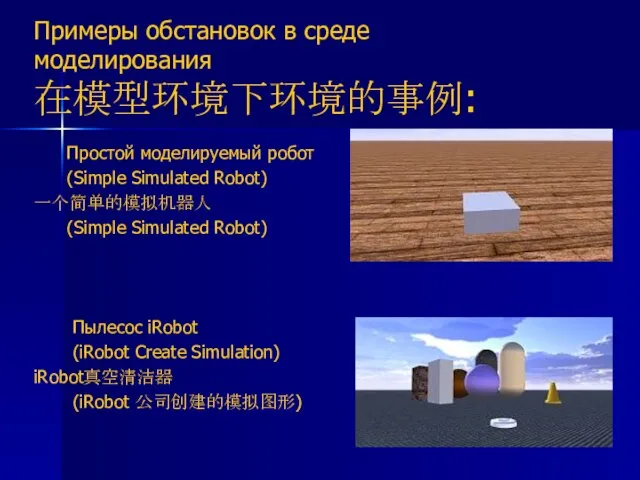
Слайд 5Примеры обстановок в среде моделирования
在模型环境下环境的事例:
Простой моделируемый робот
(Simple Simulated Robot)
一个简单的模拟机器人
Примеры обстановок в среде моделирования
在模型环境下环境的事例:
Простой моделируемый робот
(Simple Simulated Robot)
一个简单的模拟机器人
Слайд 6Примеры обстановок в среде моделирования
在模拟环境下的环境事例:
Квартира
(Apartment Environment)
公寓(Apartment Environment)
Моделирование Pioneer 3DX
(Pioneer 3DX Simulation)
Pioneer 3DX模型
(Pioneer
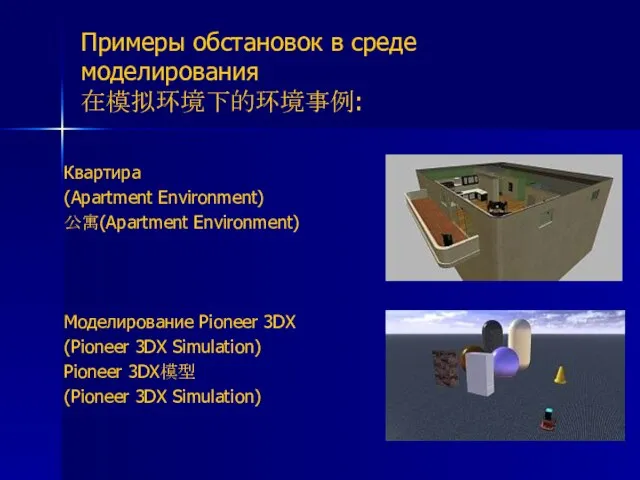
Примеры обстановок в среде моделирования
在模拟环境下的环境事例:
Квартира
(Apartment Environment)
公寓(Apartment Environment)
Моделирование Pioneer 3DX
(Pioneer 3DX Simulation)
Pioneer 3DX模型
(Pioneer
Слайд 7Примеры обстановок в среде моделирования:
在模拟环境下的环境事例:
Современный дом
(ModernHouse)
现代住房
(ModernHouse)
Естественная обстановка
(Outdoor Environment)
自然环境
(Outdoor Environment)
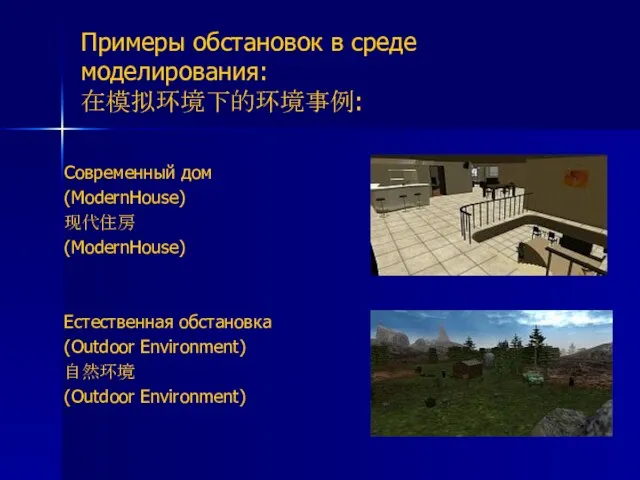
Примеры обстановок в среде моделирования:
在模拟环境下的环境事例:
Современный дом
(ModernHouse)
现代住房
(ModernHouse)
Естественная обстановка
(Outdoor Environment)
自然环境
(Outdoor Environment)
Слайд 8Примеры обстановок в среде моделирования
在模拟环境下的环境事例:
Моделирование
сопротивления воздуха
(Simulated Air Resistance)
空气阻力的模拟
(Simulated Air Resistance)
Объекты
(Entities)
对象
(Entities)
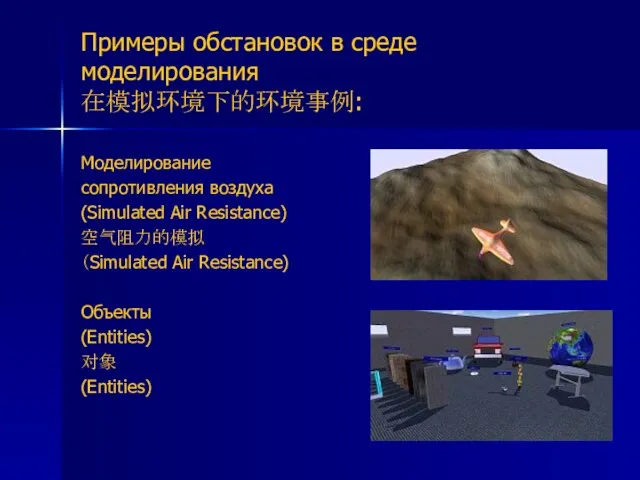
Примеры обстановок в среде моделирования
在模拟环境下的环境事例:
Моделирование
сопротивления воздуха
(Simulated Air Resistance)
空气阻力的模拟
(Simulated Air Resistance)
Объекты
(Entities)
对象
(Entities)
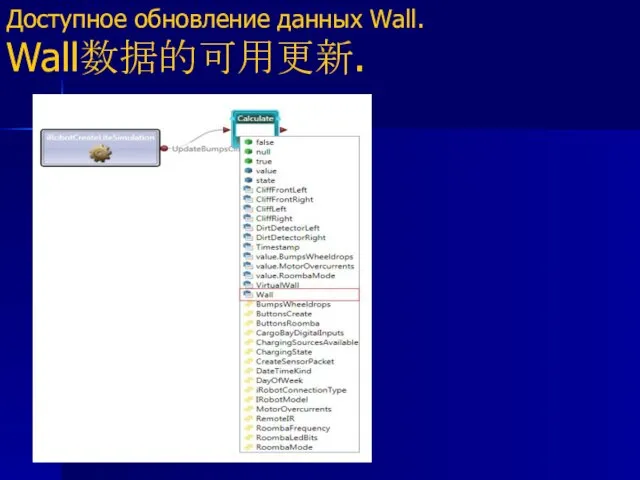
Слайд 9Доступное обновление данных Wall.
Wall数据的可用更新.
Доступное обновление данных Wall.
Wall数据的可用更新.
Слайд 10 Схемы с WallSignal.
WallSignal方案。
Схемы с WallSignal.
WallSignal方案。
 Правописание суффиксов -ик-, -ек-
Правописание суффиксов -ик-, -ек- Летопись народного единения. Виртуальная выставка
Летопись народного единения. Виртуальная выставка МОУ «ООШ с.Никольское Духовницкого района Саратовской области» Теорема Пифагора
МОУ «ООШ с.Никольское Духовницкого района Саратовской области» Теорема Пифагора Суворов Дмитрий Пройдаков ЕвгенийКазаков Дмитрий Жуков Роман Баданов Сергей Картавый Павел Иконников Евгений.
Суворов Дмитрий Пройдаков ЕвгенийКазаков Дмитрий Жуков Роман Баданов Сергей Картавый Павел Иконников Евгений. Организационно-технические требования по охране труда
Организационно-технические требования по охране труда Творчество Б. Акунина
Творчество Б. Акунина Sea battle. Шаблон
Sea battle. Шаблон Тарханы: родные всё места
Тарханы: родные всё места Общие способы получения металлов
Общие способы получения металлов Презентация на тему Семейство Губоцветные
Презентация на тему Семейство Губоцветные Обучение в рамках квоты целевого приема от компании Апатит
Обучение в рамках квоты целевого приема от компании Апатит Лепка из пластилина. Резьба по кости
Лепка из пластилина. Резьба по кости Реализация общеобразовательной программы дошкольного образования в условиях семейной группы
Реализация общеобразовательной программы дошкольного образования в условиях семейной группы Корень n-ой степени
Корень n-ой степени Анализ ассортимента и качества детского питания, реализуемого в торговом предприятии
Анализ ассортимента и качества детского питания, реализуемого в торговом предприятии Задача «Угадайка». Требуется написать программу для игры «Угадайка». По условиям игры программа «загадывает» некоторое целое чис
Задача «Угадайка». Требуется написать программу для игры «Угадайка». По условиям игры программа «загадывает» некоторое целое чис Psikhologia_Avtosokhranenny
Psikhologia_Avtosokhranenny India - English Transit
India - English Transit Метод проектирования: комбинирование.Модели-аналоги.
Метод проектирования: комбинирование.Модели-аналоги. Особенности организации и технологий образовательного процесса на основе ФГОС 2 поколения. Лекция 1-2
Особенности организации и технологий образовательного процесса на основе ФГОС 2 поколения. Лекция 1-2 Русские народные костюмы
Русские народные костюмы Трудности в обучении письму и чтению по системе Брайля
Трудности в обучении письму и чтению по системе Брайля 2011 год Всероссийский конкурс имени Д.И. Менделеева
2011 год Всероссийский конкурс имени Д.И. Менделеева Круговая теория любви Рейса
Круговая теория любви Рейса Гаврила Романович Державин Жизнь и творчество поэта
Гаврила Романович Державин Жизнь и творчество поэта Херсоне́с Таври́ческий
Херсоне́с Таври́ческий Презентация на тему Банки на рынке ценных бумаг
Презентация на тему Банки на рынке ценных бумаг Лекция 1-2 ИРЛК. Презентация Microsoft Office PowerPoint
Лекция 1-2 ИРЛК. Презентация Microsoft Office PowerPoint