Обоснование характеристик зенитного ракетного комплекса для борьбы с беспилотными летательными аппаратами
- Обоснование характеристик зенитного ракетного комплекса для борьбы с беспилотными летательными аппаратами

Содержание
- 2. Цель – выбор и обоснование тактико-технических характеристики зенитно-ракетного комплекса для борьбы с беспилотными летательными аппаратами. Задачи:
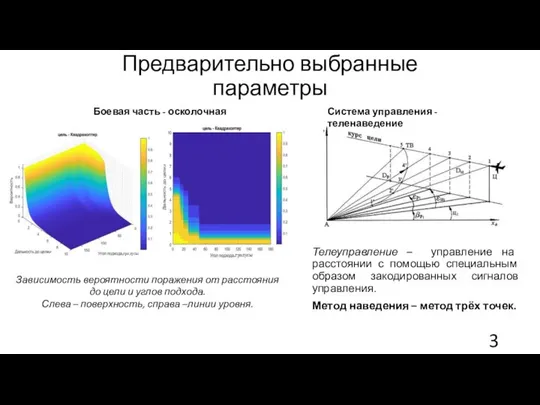
- 3. Предварительно выбранные параметры Зависимость вероятности поражения от расстояния до цели и углов подхода. Слева – поверхность,
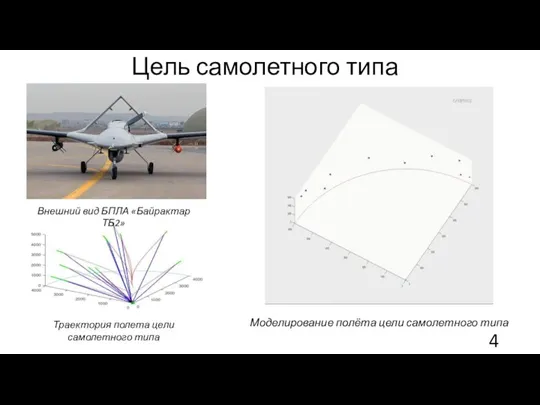
- 4. Цель самолетного типа Внешний вид БПЛА «Байрактар ТБ2» Траектория полета цели самолетного типа Моделирование полёта цели
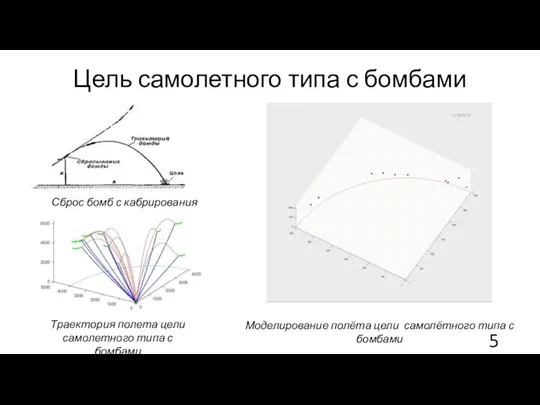
- 5. Цель самолетного типа с бомбами Сброс бомб с кабрирования Траектория полета цели самолетного типа с бомбами
- 6. Траектория полёта цели типа квадрокоптер Цель типа квадрокоптер Пример БПЛА типа квадрокоптер Моделирование полёта цели типа
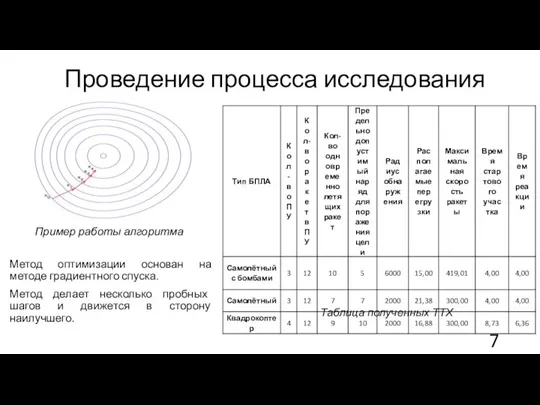
- 7. Проведение процесса исследования Метод оптимизации основан на методе градиентного спуска. Метод делает несколько пробных шагов и
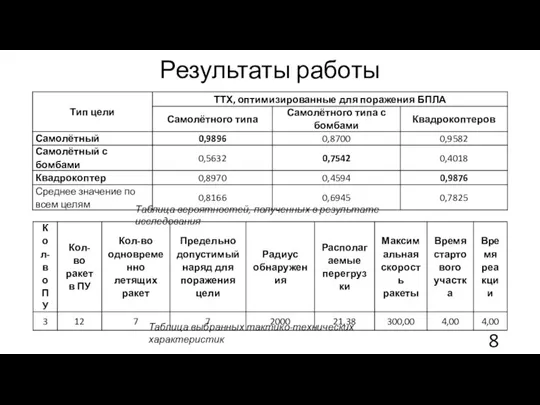
- 8. Результаты работы Таблица вероятностей, полученных в результате исследования Таблица выбранных тактико-технических характеристик
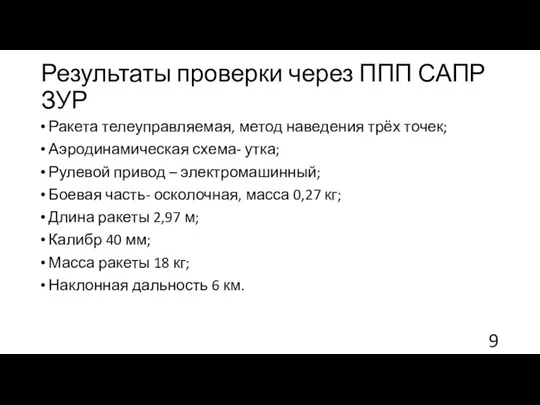
- 9. Результаты проверки через ППП САПР ЗУР Ракета телеуправляемая, метод наведения трёх точек; Аэродинамическая схема- утка; Рулевой
- 11. Скачать презентацию
Слайд 2Цель – выбор и обоснование тактико-технических характеристики зенитно-ракетного комплекса для борьбы с
Цель – выбор и обоснование тактико-технических характеристики зенитно-ракетного комплекса для борьбы с
Слайд 3Предварительно выбранные параметры
Зависимость вероятности поражения от расстояния до цели и углов подхода.
Слева
Предварительно выбранные параметры
Зависимость вероятности поражения от расстояния до цели и углов подхода.
Слева
Слайд 4Цель самолетного типа
Внешний вид БПЛА «Байрактар ТБ2»
Траектория полета цели самолетного типа
Моделирование полёта
Цель самолетного типа
Внешний вид БПЛА «Байрактар ТБ2»
Траектория полета цели самолетного типа
Моделирование полёта
Слайд 5Цель самолетного типа с бомбами
Сброс бомб с кабрирования
Траектория полета цели самолетного типа
Цель самолетного типа с бомбами
Сброс бомб с кабрирования
Траектория полета цели самолетного типа
Слайд 6Траектория полёта цели типа квадрокоптер
Цель типа квадрокоптер
Пример БПЛА типа квадрокоптер
Моделирование полёта цели
Траектория полёта цели типа квадрокоптер
Цель типа квадрокоптер
Пример БПЛА типа квадрокоптер
Моделирование полёта цели

Слайд 7Проведение процесса исследования
Метод оптимизации основан на методе градиентного спуска.
Метод делает несколько пробных
Проведение процесса исследования
Метод оптимизации основан на методе градиентного спуска.
Метод делает несколько пробных
Слайд 8Результаты работы
Таблица вероятностей, полученных в результате исследования
Таблица выбранных тактико-технических характеристик
Результаты работы
Таблица вероятностей, полученных в результате исследования
Таблица выбранных тактико-технических характеристик
Слайд 9Результаты проверки через ППП САПР ЗУР
Ракета телеуправляемая, метод наведения трёх точек;
Аэродинамическая схема-
Результаты проверки через ППП САПР ЗУР
Ракета телеуправляемая, метод наведения трёх точек;
Аэродинамическая схема-
 Сучасні частотно-керовані електроприводи змінного струму
Сучасні частотно-керовані електроприводи змінного струму Сказочный образ
Сказочный образ Н.В.Гоголь, тема маленького человека. “Петербургские повести”
Н.В.Гоголь, тема маленького человека. “Петербургские повести” Направление в банк выписки СЗИ 6 из ПФ РФ с использованием портала Госуслуг
Направление в банк выписки СЗИ 6 из ПФ РФ с использованием портала Госуслуг Готов ли Ваш ребенок к школе?
Готов ли Ваш ребенок к школе? Анализ результатов Глобального опроса взрослого населения о потреблении табака в Российской Федерации и рекомендации для дальне
Анализ результатов Глобального опроса взрослого населения о потреблении табака в Российской Федерации и рекомендации для дальне План реализации проекта "Семья"
План реализации проекта "Семья" Литературная игра«Узнай меня»
Литературная игра«Узнай меня» Социальное партнёрство с родителями по реализации ФГОС
Социальное партнёрство с родителями по реализации ФГОС Partnership Plan Academic Year 2010-2011. Ц ЕЛИ ПРОЕКТА 1.Вовлечение (INCLUSION) всеx школьных сообществ (ученики, учителя, родители и т.д.) в международный.
Partnership Plan Academic Year 2010-2011. Ц ЕЛИ ПРОЕКТА 1.Вовлечение (INCLUSION) всеx школьных сообществ (ученики, учителя, родители и т.д.) в международный. Игра - викторина по ОБЖ
Игра - викторина по ОБЖ 10201_7807318_13
10201_7807318_13 Система контрольно-оценочной деятельности на уроках ИЗО
Система контрольно-оценочной деятельности на уроках ИЗО Влекущая тайна Врубеля. Выставка презентация
Влекущая тайна Врубеля. Выставка презентация Презентация на тему Итоговое сочинение в 2016/17 учебном году
Презентация на тему Итоговое сочинение в 2016/17 учебном году Возможности и применение нанотехнологий в разработке и организации производства энергоустановок на водородном топливе
Возможности и применение нанотехнологий в разработке и организации производства энергоустановок на водородном топливе CONTROL OF SEAKEEPING Theory
CONTROL OF SEAKEEPING Theory Фотоальбом
Фотоальбом Система норм международного права, критерии её построения, отрасли и институты международного права
Система норм международного права, критерии её построения, отрасли и институты международного права Атомы и молекулы
Атомы и молекулы Внешняя политика России. Русско - японская война. ( 1904-1905 гг.)
Внешняя политика России. Русско - японская война. ( 1904-1905 гг.) Do you manage a Hotel ?
Do you manage a Hotel ? Последовательность обработки верхнего среза юбки притачным поясом
Последовательность обработки верхнего среза юбки притачным поясом строение и работа сердца
строение и работа сердца «Инструменты организации развития и технологического перевооружения машиностроительной корпорации»
«Инструменты организации развития и технологического перевооружения машиностроительной корпорации» Презентация на тему ДАНИЯ
Презентация на тему ДАНИЯ  Анализ допущенных биологических ошибок в научно-популярной литературе
Анализ допущенных биологических ошибок в научно-популярной литературе Презентация на тему Подготовка к олимпиаде по русскому языку
Презентация на тему Подготовка к олимпиаде по русскому языку