- Обучение, ориентированное на конкретное применение

Содержание
- 2. Регулируемые электроприводы
- 3. Изменение скорости у асинхронных машин
- 4. Двуполярный двигатель Механическое изменение - Заклиненные шкивы - Раздвижные шкивы - Конические шкивы Регулируемые редукторы Частотно-регулируемые
- 5. Основные преимущества регулируемых электроприводов Дистанционное управления – панель управления может быть установлена дистанционно от двигателя, находящегося
- 6. Основной состав Регулируемые электроприводы
- 7. Регулируемые электроприводы
- 8. Регулируемые электроприводы Блок выпрямления Блок постоянного тока Блок преобразования Интерфейс и приводы ЦПУ Цифровой вход/выход Аналоговый
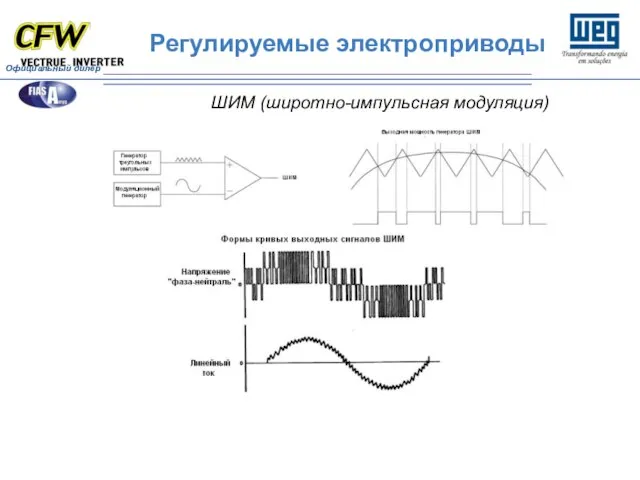
- 9. ШИМ (широтно-импульсная модуляция) Регулируемые электроприводы
- 10. Регулируемые электроприводы Существует два типа управления инвертора: Управление В/Гц (скалярное управление) Линейное Квадратичное Векторное управление Без
- 11. Момент, созданный асинхронным двигателем: Магнитный поток это: P=T.n Управление В/Гц (скалярное)
- 12. Векторное управление Векторное управление обеспечивает быстрые реакции и высокий уровень точности управления частотой вращения двигателя и
- 13. Основное различие между данными двумя типами управления: Скалярное управление учитывает только величины мгновенных электрических параметров (магнитный
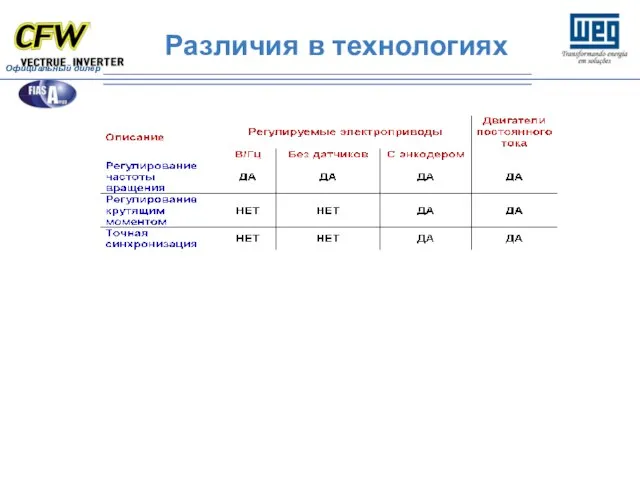
- 14. Различия в технологиях
- 15. Различия в технологиях
- 17. Скачать презентацию

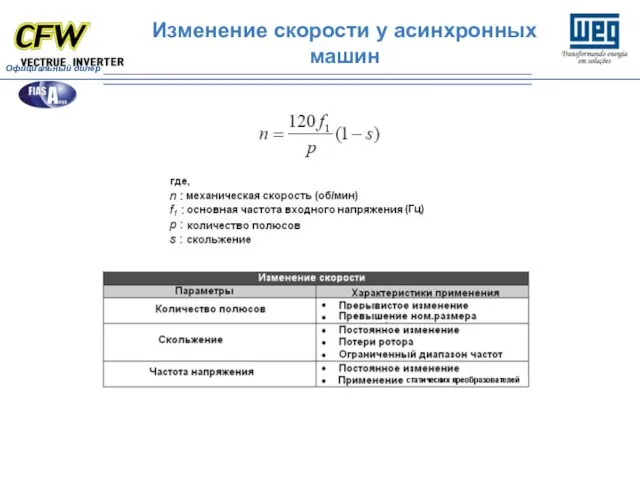
Слайд 3Изменение скорости у асинхронных машин
Изменение скорости у асинхронных машин
Слайд 4 Двуполярный двигатель
Механическое изменение - Заклиненные шкивы - Раздвижные шкивы
Двуполярный двигатель
Механическое изменение - Заклиненные шкивы - Раздвижные шкивы
Слайд 5Основные преимущества регулируемых электроприводов
Дистанционное управления – панель управления может быть
Основные преимущества регулируемых электроприводов
Дистанционное управления – панель управления может быть
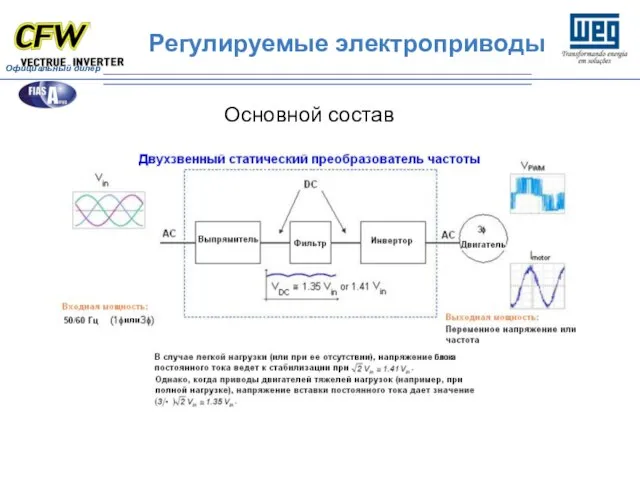
Слайд 6Основной состав
Регулируемые электроприводы
Основной состав
Регулируемые электроприводы
Слайд 7Регулируемые электроприводы
Регулируемые электроприводы

Слайд 8Регулируемые электроприводы
Блок
выпрямления
Блок
постоянного
тока
Блок
преобразования
Интерфейс и приводы
ЦПУ
Цифровой вход/выход
Регулируемые электроприводы
Блок
выпрямления
Блок
постоянного
тока
Блок
преобразования
Интерфейс и приводы
ЦПУ
Цифровой вход/выход

Слайд 9ШИМ (широтно-импульсная модуляция)
Регулируемые электроприводы
ШИМ (широтно-импульсная модуляция)
Регулируемые электроприводы
Слайд 10Регулируемые электроприводы
Существует два типа управления инвертора:
Управление В/Гц (скалярное управление)
Линейное
Регулируемые электроприводы
Существует два типа управления инвертора:
Управление В/Гц (скалярное управление)
Линейное
Слайд 11Момент, созданный
асинхронным двигателем:
Магнитный поток это:
P=T.n
Управление В/Гц (скалярное)
Момент, созданный
асинхронным двигателем:
Магнитный поток это:
P=T.n
Управление В/Гц (скалярное)

Слайд 12Векторное управление
Векторное управление обеспечивает быстрые реакции и высокий уровень точности
Векторное управление
Векторное управление обеспечивает быстрые реакции и высокий уровень точности
Слайд 13Основное различие между данными двумя типами управления:
Скалярное управление учитывает только
Основное различие между данными двумя типами управления:
Скалярное управление учитывает только
Слайд 14Различия в технологиях
Различия в технологиях

Слайд 15Различия в технологиях
Различия в технологиях
 Музей Люфтваффе
Музей Люфтваффе 20170327_prezentatsiya_mirovye_resursy
20170327_prezentatsiya_mirovye_resursy SDL Trados Studio 2009 SP3 SDL Trados Team SDL MultiTerm Team
SDL Trados Studio 2009 SP3 SDL Trados Team SDL MultiTerm Team характеристика
характеристика Презентация на тему КУЛЬТУРА Культура в переводе с латинского означает возделывание, взращивание
Презентация на тему КУЛЬТУРА Культура в переводе с латинского означает возделывание, взращивание  Общие принципы диспансерного наблюдения
Общие принципы диспансерного наблюдения Верификацияавтоматных программ
Верификацияавтоматных программ Программирование на Бейсик
Программирование на Бейсик Интеллектуальное оповещение дежурно-диспетчерского персонала ДЦС-7
Интеллектуальное оповещение дежурно-диспетчерского персонала ДЦС-7 УЧИСЬ В ГОЛЛАНДИИ
УЧИСЬ В ГОЛЛАНДИИ  Неделя английского языка2011-2012
Неделя английского языка2011-2012 Презентация Microsoft PowerPoint
Презентация Microsoft PowerPoint 12 апреля –День космонавтики
12 апреля –День космонавтики Водоросли
Водоросли Корейская культура. Рисунок - музыка - поэзия
Корейская культура. Рисунок - музыка - поэзия Сессия стратегического планирования
Сессия стратегического планирования ФОРМИРОВАНИЕ МОТИВАЦИИ УЧЕБНОЙ ДЕЯТЕЛЬНОСТИ У СТУДЕНТОВ
ФОРМИРОВАНИЕ МОТИВАЦИИ УЧЕБНОЙ ДЕЯТЕЛЬНОСТИ У СТУДЕНТОВ Робот-манипулятор. Разработка конструкции в 3D, с применением CAD системы SolidWorks
Робот-манипулятор. Разработка конструкции в 3D, с применением CAD системы SolidWorks Проведение экспертизы раздела проектной документации «Мероприятия по обеспечению пожарной безопасности». Типовые несоответств
Проведение экспертизы раздела проектной документации «Мероприятия по обеспечению пожарной безопасности». Типовые несоответств Политическое сознание и политическое поведение
Политическое сознание и политическое поведение  Проект «Численность населения села Байдары»
Проект «Численность населения села Байдары» Давайте повторим:
Давайте повторим: Групповой проект
Групповой проект Налог на имущество
Налог на имущество Роль сметы в системе управления строительно-подрядным предприятием
Роль сметы в системе управления строительно-подрядным предприятием Человек, изменивший искусство. К 140-летию со дня рождения Пабло Пикассо
Человек, изменивший искусство. К 140-летию со дня рождения Пабло Пикассо Презентациябизнес-планаОбщие рекомендации
Презентациябизнес-планаОбщие рекомендации МГТУ ГА ФИЗИКА
МГТУ ГА ФИЗИКА