- Описание и преобразование управляющих процессов

Содержание
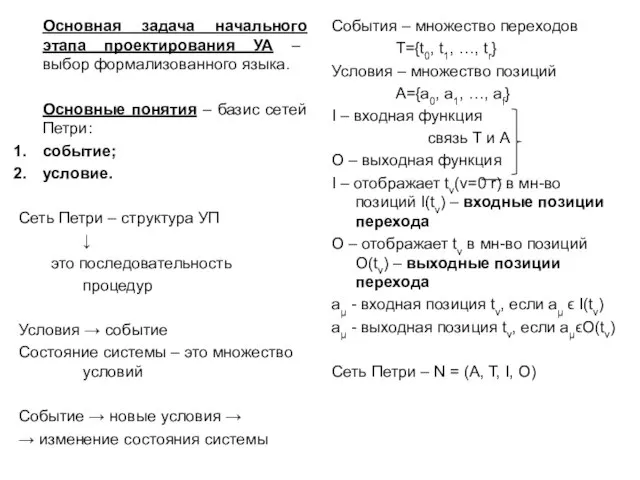
- 2. Основная задача начального этапа проектирования УА – выбор формализованного языка. Основные понятия – базис сетей Петри:
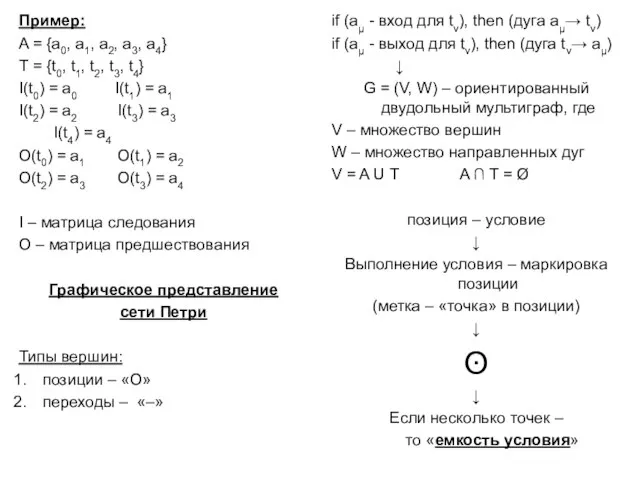
- 3. Пример: A = {a0, a1, a2, a3, a4} T = {t0, t1, t2, t3, t4} I(t0)
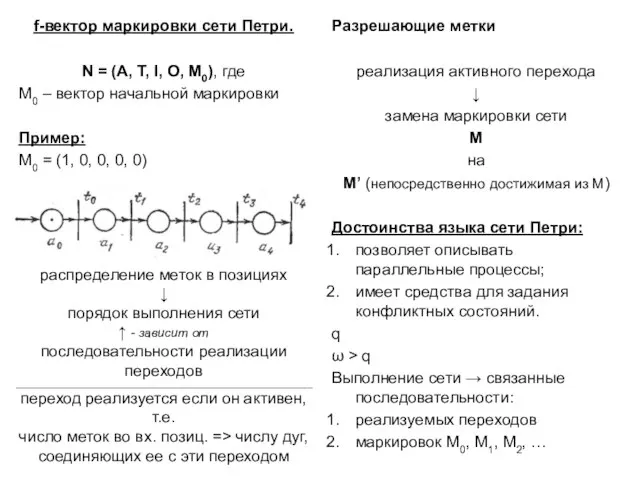
- 4. f-вектор маркировки сети Петри. N = (A, T, I, O, M0), где M0 – вектор начальной
- 5. Безопасная сеть Петри. запрещено наличие кратных дуг между позициями и переходами; вектор маркировки может содержать лишь
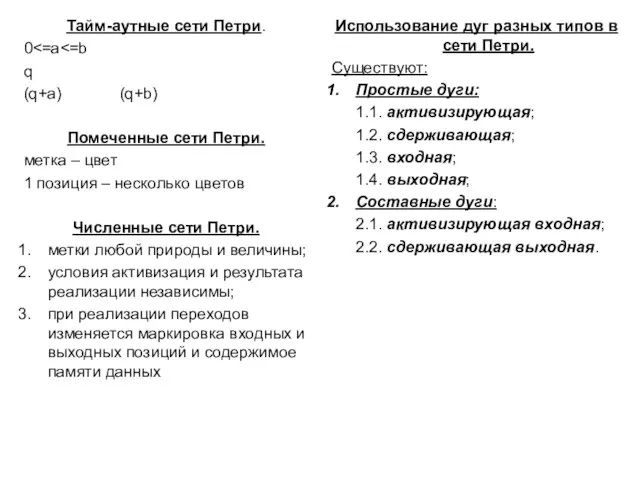
- 6. Тайм-аутные сети Петри. 0 q (q+a) (q+b) Помеченные сети Петри. метка – цвет 1 позиция –
- 7. Управляющие процессы и их формализованное описание.
- 8. Простейший линейный последовательный процесс – оригинальная сеть Петри. Ai – процедуры (i = 0 – k)
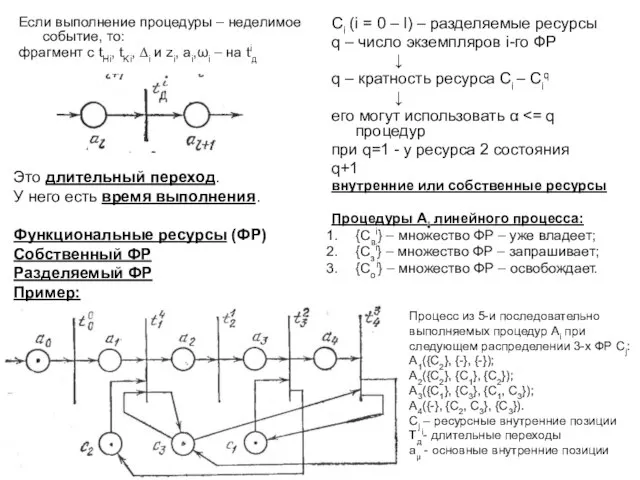
- 9. Если выполнение процедуры – неделимое событие, то: фрагмент с tHi, tKi, ∆i и zi, ai,ωi –
- 10. Пример: Если для Ai – {Cвi}=C1, {Cзi}=C3, C4 и {Cоi}=C1, C4, то Ai({C1}, {C3, C4}, {C1,
- 12. Пример: Особенности описания разветвленного процесса в сети Петри. позиции альтернативного разветвления; позиции альтернативного соединения; набор значений
- 13. Логические ресурсы системы – ЛР. Di (i = 1 – m) – ЛР в ЛР Ds
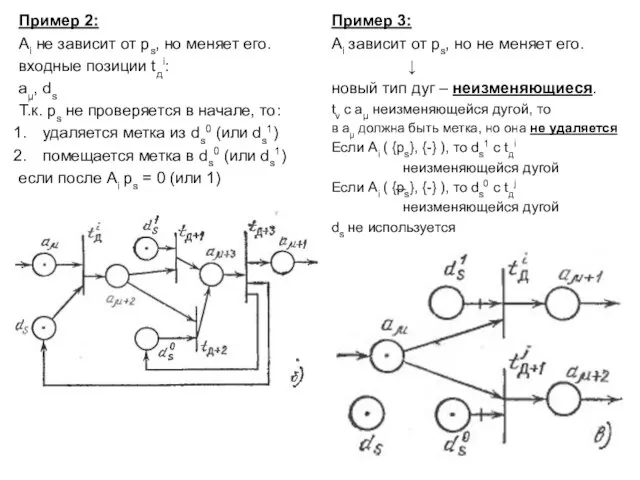
- 14. Пример 2: Ai не зависит от ps, но меняет его. входные позиции tдi: aµ, ds Т.к.
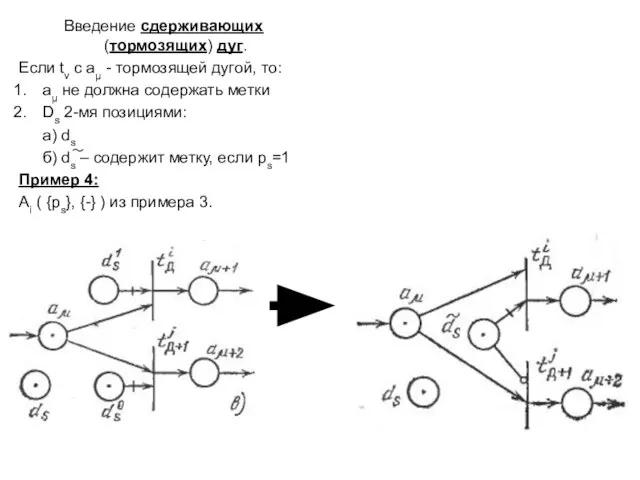
- 15. Введение сдерживающих (тормозящих) дуг. Если tv c aµ - тормозящей дугой, то: aµ не должна содержать
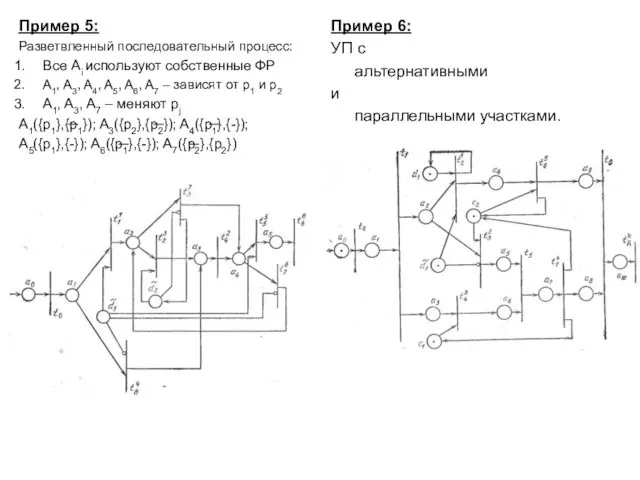
- 16. Пример 5: Разветвленный последовательный процесс: Все Ai используют собственные ФР A1, A3, A4, A5, A6, A7
- 17. Обобщенная сеть Петри для описания неавтономного управляющего процесса.
- 18. Автономный УП Неавтономный УП Описание неавтономного процесса: внеш. ЛУ (pu) ↔ внеш. позиция hu – метка
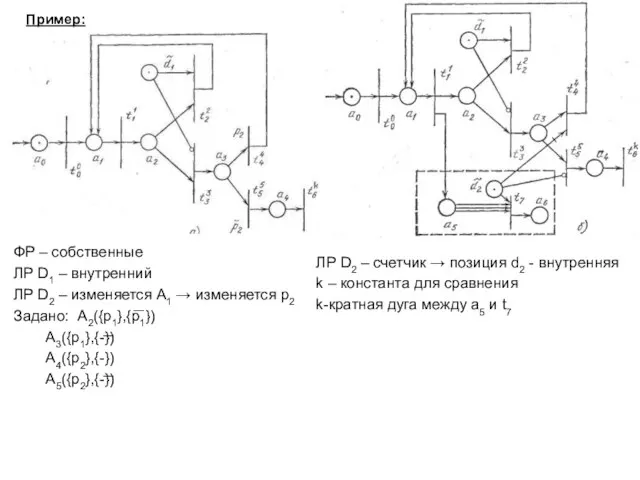
- 19. Пример: ФР – собственные ЛР D1 – внутренний ЛР D2 – изменяется A1 → изменяется p2
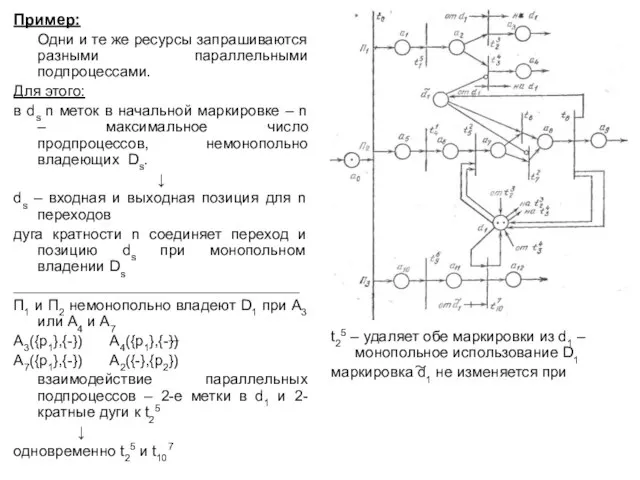
- 20. Пример: Одни и те же ресурсы запрашиваются разными параллельными подпроцессами. Для этого: в ds n меток
- 21. Граф обобщенной сети Петри содержит: длительные переходы примитивные переходы основные внутренние позиции ресурсные внутренние позиции основные
- 22. Получение правильного управляющего процесса. Граф достижимых маркировок сети Петри.
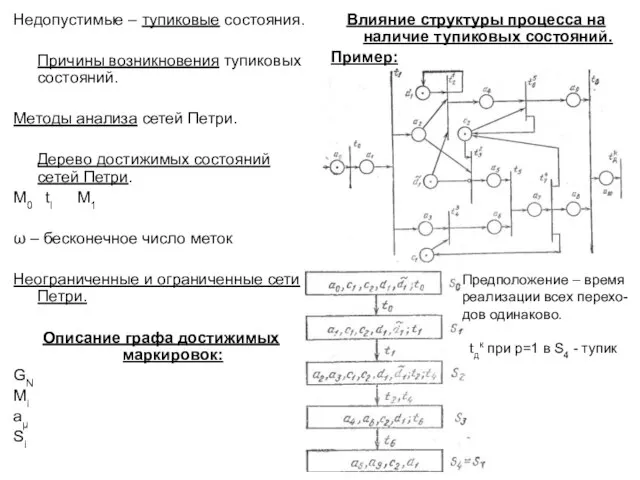
- 23. Недопустимые – тупиковые состояния. Причины возникновения тупиковых состояний. Методы анализа сетей Петри. Дерево достижимых состояний сетей
- 24. Для p=0 в начальной маркировке, т.е. в ds нет метки – вместо t2 будет активизирован t3.
- 25. Это динамический граф. Исходящие дуги – переходы, переходящие в стадию реализации. Входящие дуги – переходы, закончившие
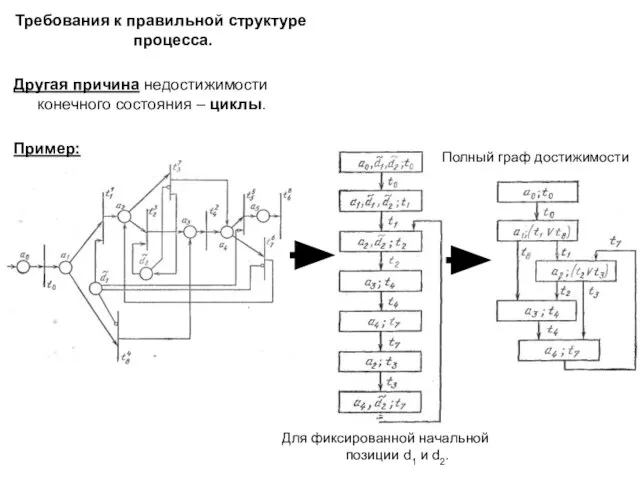
- 26. Требования к правильной структуре процесса. Другая причина недостижимости конечного состояния – циклы. Пример: Для фиксированной начальной
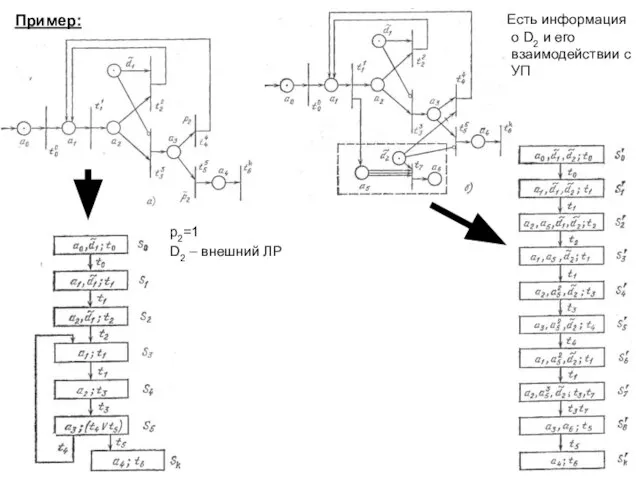
- 27. Пример: p2=1 D2 – внешний ЛР Есть информация о D2 и его взаимодействии с УП
- 28. Тупиковые состояния, вызываемые разделением функциональных ресурсов. Пример: П1 и П2 – асинхронные циклические процессы С1 и
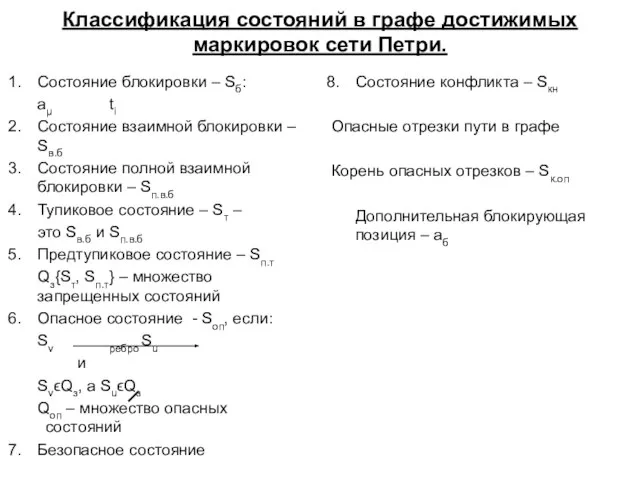
- 29. Классификация состояний в графе достижимых маркировок сети Петри. Состояние блокировки – Sб: aµ ti Состояние взаимной
- 31. Скачать презентацию
Слайд 2 Основная задача начального этапа проектирования УА – выбор формализованного языка.
Основные понятия –
Основная задача начального этапа проектирования УА – выбор формализованного языка.
Основные понятия –
Слайд 3Пример:
A = {a0, a1, a2, a3, a4}
T = {t0, t1, t2, t3,
Пример:
A = {a0, a1, a2, a3, a4}
T = {t0, t1, t2, t3,
Слайд 4f-вектор маркировки сети Петри.
N = (A, T, I, O, M0), где
M0 –
f-вектор маркировки сети Петри.
N = (A, T, I, O, M0), где
M0 –
Слайд 5Безопасная сеть Петри.
запрещено наличие кратных дуг между позициями и переходами;
вектор маркировки может
Безопасная сеть Петри.
запрещено наличие кратных дуг между позициями и переходами;
вектор маркировки может
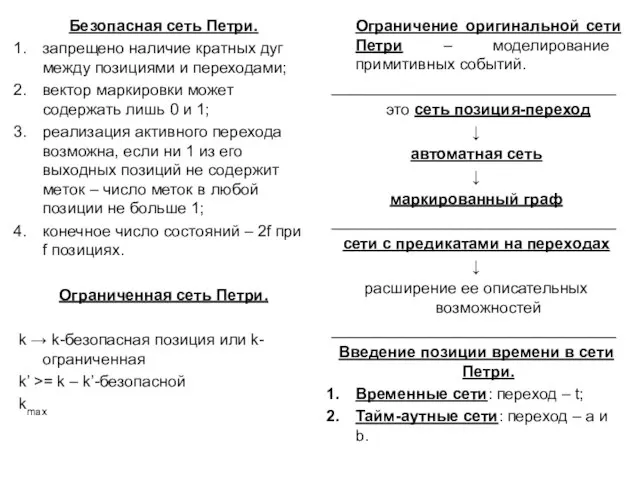
Слайд 6Тайм-аутные сети Петри.
0<=a<=b
q
(q+a) (q+b)
Помеченные сети Петри.
метка – цвет
1 позиция – несколько цветов
Численные сети
Тайм-аутные сети Петри.
0<=a<=b
q
(q+a) (q+b)
Помеченные сети Петри.
метка – цвет
1 позиция – несколько цветов
Численные сети
Слайд 7Управляющие процессы и их формализованное описание.
Управляющие процессы и их формализованное описание.
Слайд 8Простейший линейный последовательный процесс – оригинальная сеть Петри.
Ai – процедуры (i =
Простейший линейный последовательный процесс – оригинальная сеть Петри.
Ai – процедуры (i =
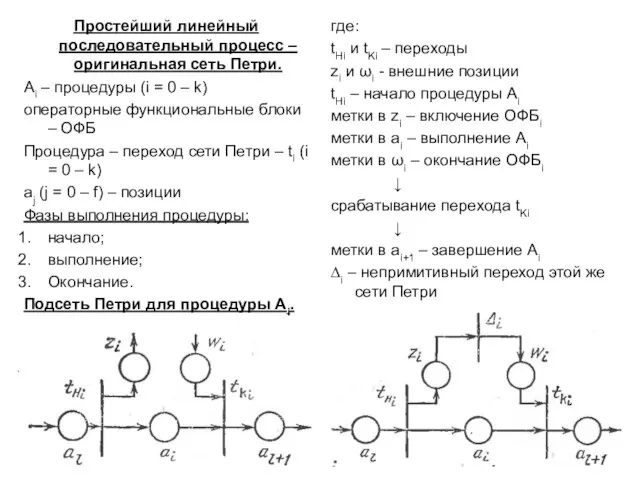
Слайд 9Если выполнение процедуры – неделимое событие, то:
фрагмент с tHi, tKi, ∆i и
Если выполнение процедуры – неделимое событие, то:
фрагмент с tHi, tKi, ∆i и
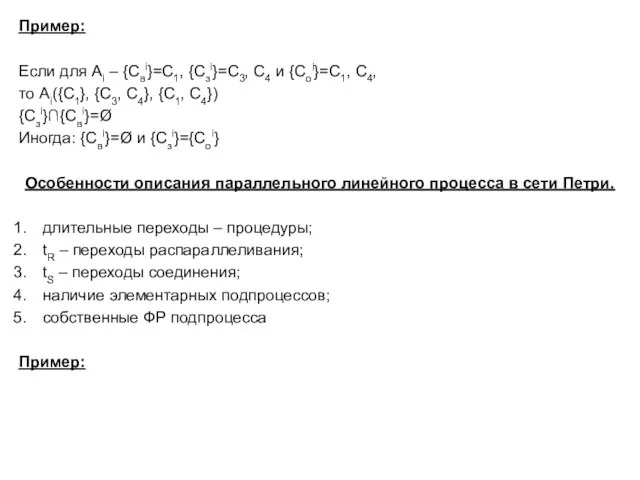
Слайд 10Пример:
Если для Ai – {Cвi}=C1, {Cзi}=C3, C4 и {Cоi}=C1, C4,
то Ai({C1}, {C3,
Пример:
Если для Ai – {Cвi}=C1, {Cзi}=C3, C4 и {Cоi}=C1, C4,
то Ai({C1}, {C3,
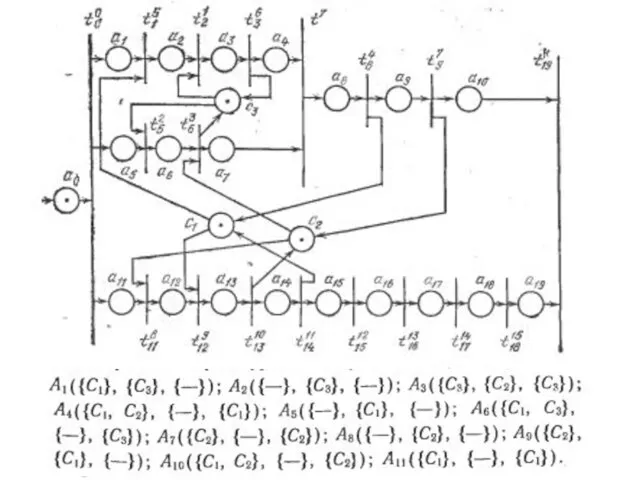
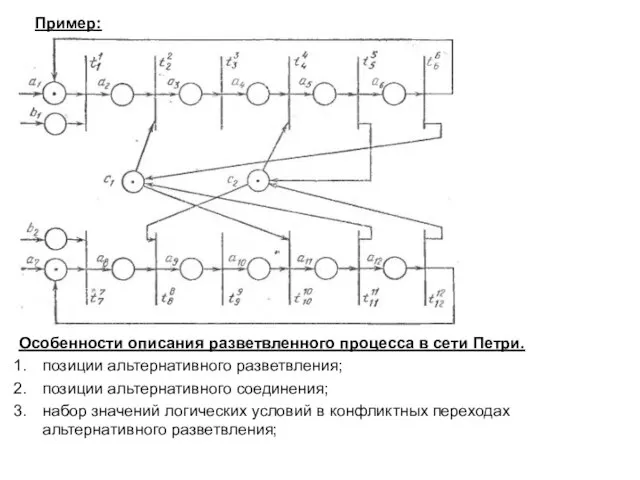
Слайд 12Пример:
Особенности описания разветвленного процесса в сети Петри.
позиции альтернативного разветвления;
позиции альтернативного соединения;
набор значений
Пример:
Особенности описания разветвленного процесса в сети Петри.
позиции альтернативного разветвления;
позиции альтернативного соединения;
набор значений
Слайд 13Логические ресурсы системы – ЛР.
Di (i = 1 – m) – ЛР
в
Логические ресурсы системы – ЛР.
Di (i = 1 – m) – ЛР
в
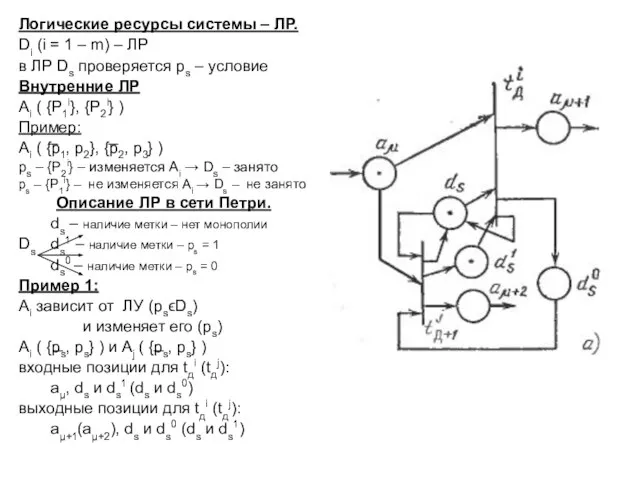
Слайд 14Пример 2:
Ai не зависит от ps, но меняет его.
входные позиции tдi:
aµ, ds
Т.к.
Пример 2:
Ai не зависит от ps, но меняет его.
входные позиции tдi:
aµ, ds
Т.к.
Слайд 15Введение сдерживающих (тормозящих) дуг.
Если tv c aµ - тормозящей дугой, то:
aµ не
Введение сдерживающих (тормозящих) дуг.
Если tv c aµ - тормозящей дугой, то:
aµ не
Слайд 16Пример 5:
Разветвленный последовательный процесс:
Все Ai используют собственные ФР
A1, A3, A4, A5, A6,
Пример 5:
Разветвленный последовательный процесс:
Все Ai используют собственные ФР
A1, A3, A4, A5, A6,
Слайд 17Обобщенная сеть Петри для описания неавтономного управляющего процесса.
Обобщенная сеть Петри для описания неавтономного управляющего процесса.
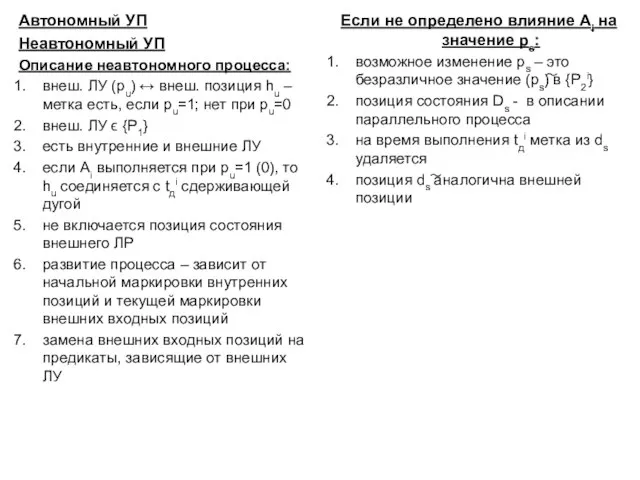
Слайд 18Автономный УП
Неавтономный УП
Описание неавтономного процесса:
внеш. ЛУ (pu) ↔ внеш. позиция hu –
Автономный УП
Неавтономный УП
Описание неавтономного процесса:
внеш. ЛУ (pu) ↔ внеш. позиция hu –
Слайд 19Пример:
ФР – собственные
ЛР D1 – внутренний
ЛР D2 – изменяется A1 → изменяется
Пример:
ФР – собственные
ЛР D1 – внутренний
ЛР D2 – изменяется A1 → изменяется
Слайд 20Пример:
Одни и те же ресурсы запрашиваются разными параллельными подпроцессами.
Для этого:
в ds n
Пример:
Одни и те же ресурсы запрашиваются разными параллельными подпроцессами.
Для этого:
в ds n
Слайд 21Граф обобщенной сети Петри содержит:
длительные переходы
примитивные переходы
основные внутренние позиции
ресурсные внутренние позиции
основные дуги
неизменяющие
Граф обобщенной сети Петри содержит:
длительные переходы
примитивные переходы
основные внутренние позиции
ресурсные внутренние позиции
основные дуги
неизменяющие
Слайд 22Получение правильного управляющего процесса.
Граф достижимых маркировок сети Петри.
Получение правильного управляющего процесса.
Граф достижимых маркировок сети Петри.
Слайд 23Недопустимые – тупиковые состояния.
Причины возникновения тупиковых состояний.
Методы анализа сетей Петри.
Дерево достижимых состояний
Недопустимые – тупиковые состояния.
Причины возникновения тупиковых состояний.
Методы анализа сетей Петри.
Дерево достижимых состояний
Слайд 24 Для p=0 в начальной маркировке, т.е. в ds нет метки – вместо
Для p=0 в начальной маркировке, т.е. в ds нет метки – вместо
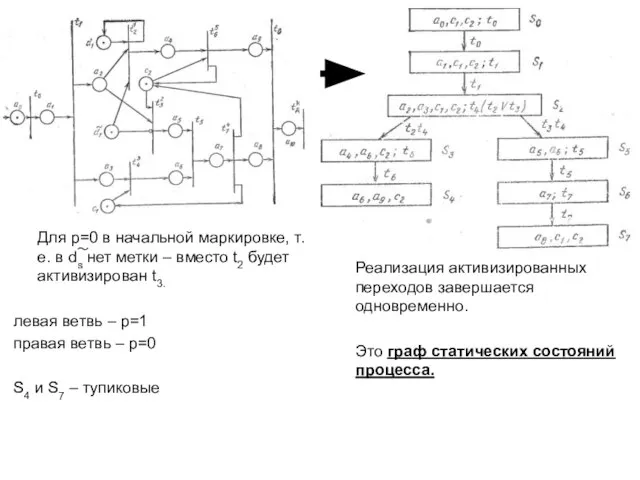
Слайд 25Это динамический граф.
Исходящие дуги – переходы, переходящие в стадию реализации.
Входящие дуги –
Это динамический граф.
Исходящие дуги – переходы, переходящие в стадию реализации.
Входящие дуги –

Слайд 26Требования к правильной структуре процесса.
Другая причина недостижимости конечного состояния – циклы.
Пример:
Для фиксированной
Требования к правильной структуре процесса.
Другая причина недостижимости конечного состояния – циклы.
Пример:
Для фиксированной
Слайд 27Пример:
p2=1
D2 – внешний ЛР
Есть информация о D2 и его взаимодействии с
Пример:
p2=1
D2 – внешний ЛР
Есть информация о D2 и его взаимодействии с
Слайд 28Тупиковые состояния, вызываемые разделением функциональных ресурсов.
Пример:
П1 и П2 – асинхронные циклические процессы
С1
Тупиковые состояния, вызываемые разделением функциональных ресурсов.
Пример:
П1 и П2 – асинхронные циклические процессы
С1

Слайд 29Классификация состояний в графе достижимых маркировок сети Петри.
Состояние блокировки – Sб:
aµ ti
Состояние взаимной
Классификация состояний в графе достижимых маркировок сети Петри.
Состояние блокировки – Sб:
aµ ti
Состояние взаимной
 Обсуждение притчи как мотивационный прием Жил-был юноша с плохим характером. Отец дал ему полный мешок гвоздей и сказал: «З
Обсуждение притчи как мотивационный прием Жил-был юноша с плохим характером. Отец дал ему полный мешок гвоздей и сказал: «З Stand design | bendix | automechanika- 2016
Stand design | bendix | automechanika- 2016 Национальная галерея искусства в Вашингтоне.
Национальная галерея искусства в Вашингтоне. Модернизация пескоразбрасывающего оборудования. Повышение сцепления абразивных частиц с поверхностью снежно-ледяных образований
Модернизация пескоразбрасывающего оборудования. Повышение сцепления абразивных частиц с поверхностью снежно-ледяных образований 111
111 Приготовление щей, борщей
Приготовление щей, борщей УСТРОЙСТВО ОРИЕНТАЦИИ БУТЫЛОК (УНИВЕРСАЛЬНОЕ)
УСТРОЙСТВО ОРИЕНТАЦИИ БУТЫЛОК (УНИВЕРСАЛЬНОЕ) Общая психология
Общая психология Бизнес-план, его назначение и структура
Бизнес-план, его назначение и структура Организация психологических служб в медицинских учреждениях
Организация психологических служб в медицинских учреждениях Организационно-правовые формы предприятия
Организационно-правовые формы предприятия Мастер света
Мастер света Кафедра физико – математических дисциплин
Кафедра физико – математических дисциплин Простые вещества - металлы и неметаллы
Простые вещества - металлы и неметаллы Мотивация оператора
Мотивация оператора Презентация на тему Гражданское право по Судебнику 1497 г
Презентация на тему Гражданское право по Судебнику 1497 г  Стенокардия
Стенокардия Сотрудники Call-центра: кто они, где их искать и чему учить.
Сотрудники Call-центра: кто они, где их искать и чему учить. Приоритетный национальный проект «Образование»
Приоритетный национальный проект «Образование» Подготовка к написанию сочинения «Описание внешности знакомого»
Подготовка к написанию сочинения «Описание внешности знакомого» Векторная графика в Word и Power Point
Векторная графика в Word и Power Point ИННОВАЦИОННЫЕ ПОДХОДЫ К КОМПЛЕКСНОЙ ТЕРАПИИ БОЛЬНЫХ ТУБЕРКУЛЕЗОМ НОВАЯ ГРУППА ЛЕКАРСТВЕННЫХ ПРЕПАРАТОВ – РЕГУЛЯТОРЫ ЗАЩИТНЫХ С
ИННОВАЦИОННЫЕ ПОДХОДЫ К КОМПЛЕКСНОЙ ТЕРАПИИ БОЛЬНЫХ ТУБЕРКУЛЕЗОМ НОВАЯ ГРУППА ЛЕКАРСТВЕННЫХ ПРЕПАРАТОВ – РЕГУЛЯТОРЫ ЗАЩИТНЫХ С «Построение маркетинговых коммуникаций с молодёжной аудиторией в соответствии с её образом жизни и моделью потребления»
«Построение маркетинговых коммуникаций с молодёжной аудиторией в соответствии с её образом жизни и моделью потребления» Презентация на тему Гималаи
Презентация на тему Гималаи Памятник Петру Великому "Медный всадник"
Памятник Петру Великому "Медный всадник" Инновационные технологии диагностики и мониторинга плоских кровель
Инновационные технологии диагностики и мониторинга плоских кровель М О Я Р О Д И Н А - Р О С С И Я
М О Я Р О Д И Н А - Р О С С И Я Родительское собрание.
Родительское собрание.