- Определение характеристик средств активного управления в задачах динамического позиционирования.

Содержание
- 2. Постановка задачи Определение характеристик упоров ВРШ и НПУ для формирования команд на системы ДАУ ВРШ и
- 3. Корабль береговой охраны Главные размерения: Длина - - - - - - - - - -
- 4. Режимы работы СКУ Система координированного управления (СКУ) предназначена для ручного и автоматического управления движением судна на
- 5. Структура алгоритмического обеспечения СКУ
- 6. Алгоритм распределения упоров Система координат
- 7. Определение упоров ВРШ Диаграммы ВРШ Зависимость упора ВРШ от относительного шага ВРШ
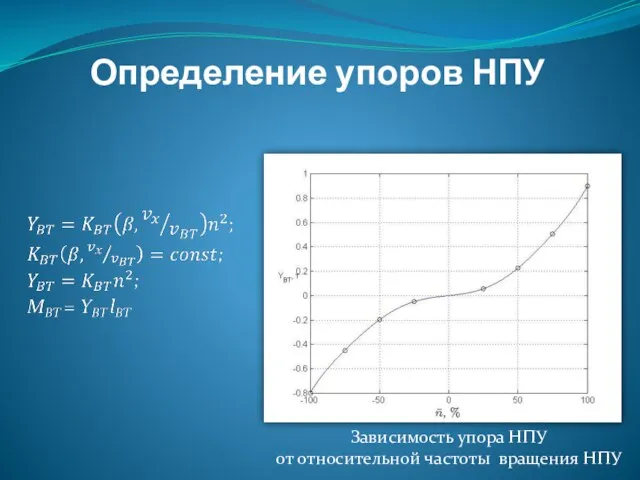
- 9. Определение упоров НПУ Зависимость упора НПУ от относительной частоты вращения НПУ
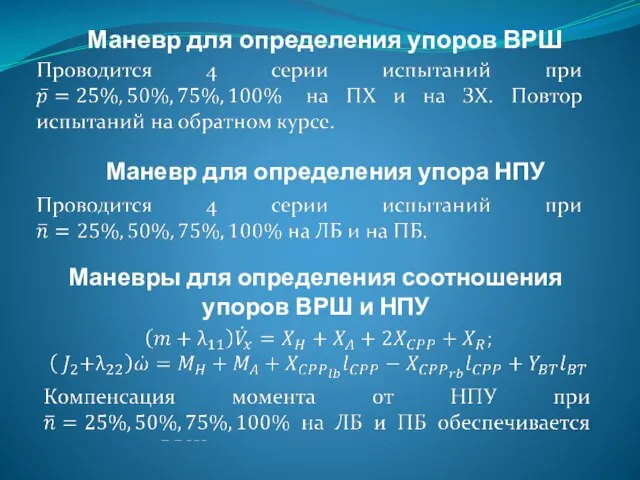
- 10. Маневр для определения упоров ВРШ Маневр для определения упора НПУ Маневры для определения соотношения упоров ВРШ
- 11. Методы оценки ускорения Фильтрация во временной области: запаздывание необходимость оценивать имеющиеся шумы и возмущения Фильтрация в
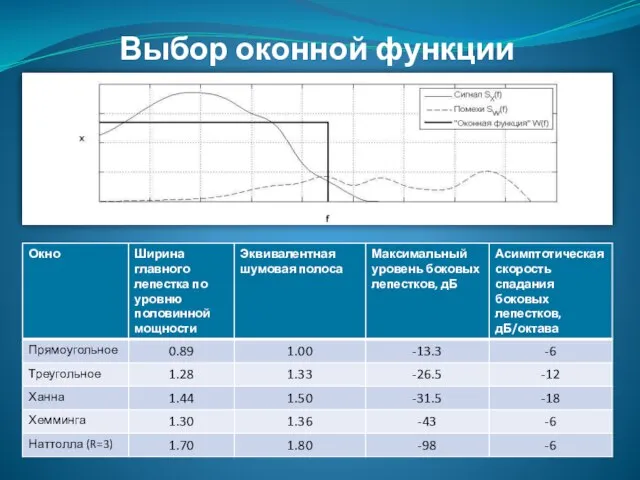
- 12. Выбор оконной функции
- 13. Подготовка сигнала к фильтрации в частотной области Преобразование сигнала с целью получения сигнала с постоянным шагом.
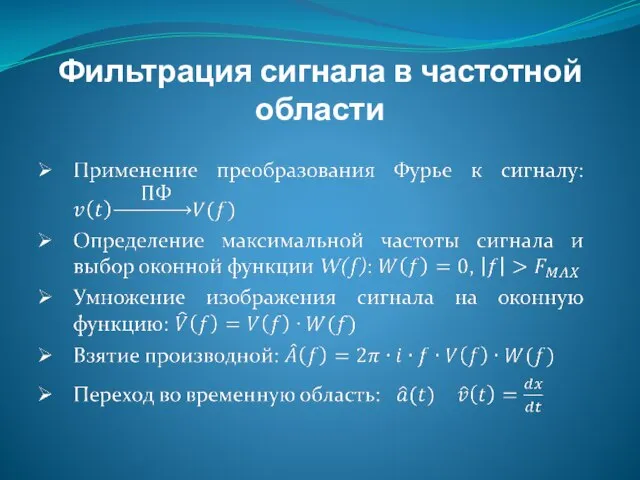
- 14. Фильтрация сигнала в частотной области
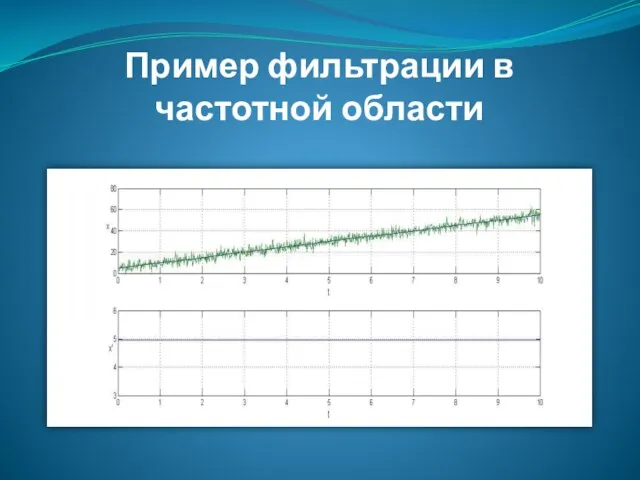
- 15. Пример фильтрации в частотной области
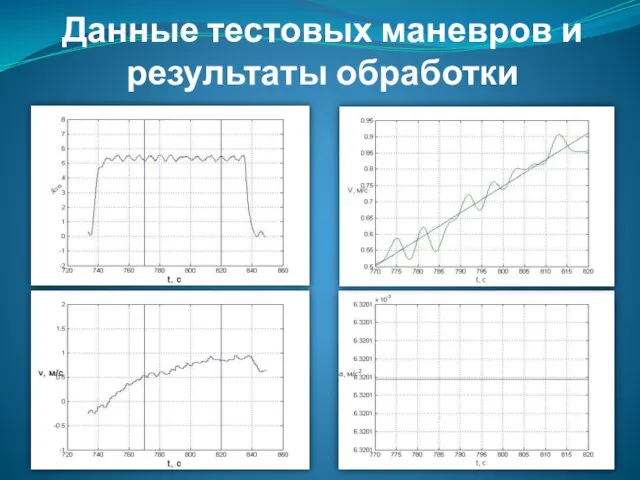
- 16. Данные тестовых маневров и результаты обработки
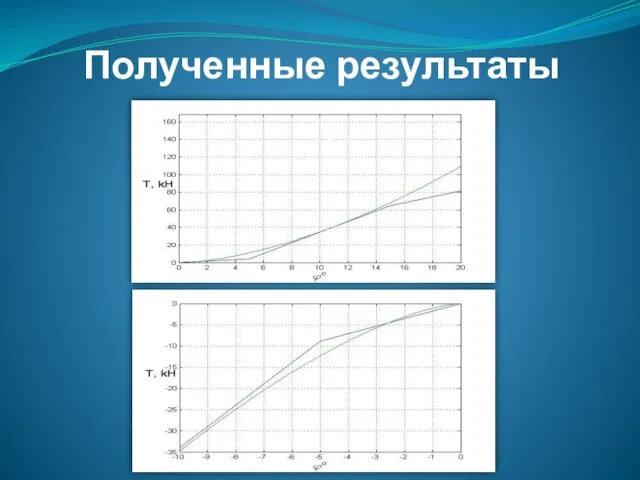
- 17. Полученные результаты
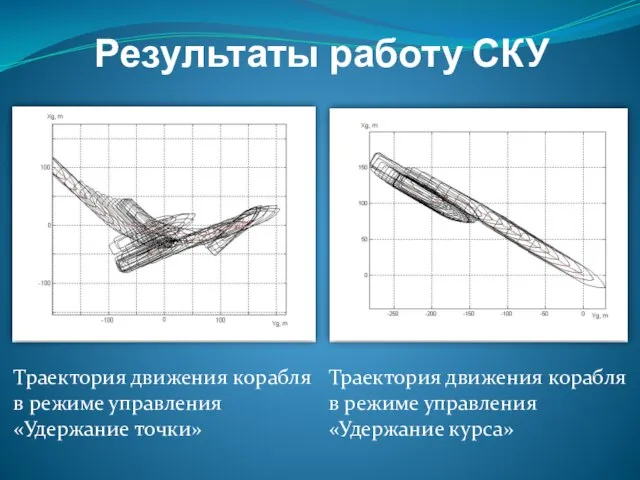
- 18. Результаты работу СКУ Траектория движения корабля в режиме управления «Удержание курса» Траектория движения корабля в режиме
- 19. Заключение Предложена методика определения упоров ВРШ и НПУ для обеспечения работу СКУ на основе фильтрации сигнала
- 20. Дополнительные слайды с результатами
- 21. Дополнительные слайды с результатами
- 22. Дополнительные слайды с результатами
- 23. Дополнительные слайды с результатами
- 24. Дополнительные слайды с результатами
- 26. Скачать презентацию
Слайд 2Постановка задачи
Определение характеристик упоров ВРШ и НПУ для формирования команд на системы
Постановка задачи
Определение характеристик упоров ВРШ и НПУ для формирования команд на системы
Слайд 3Корабль береговой охраны
Главные размерения:
Длина - - - - - - - -
Корабль береговой охраны
Главные размерения:
Длина - - - - - - - -

Слайд 4Режимы работы СКУ
Система координированного управления (СКУ) предназначена для ручного и автоматического управления
Режимы работы СКУ
Система координированного управления (СКУ) предназначена для ручного и автоматического управления
Слайд 5Структура алгоритмического обеспечения СКУ
Структура алгоритмического обеспечения СКУ

Слайд 6Алгоритм распределения упоров
Система координат
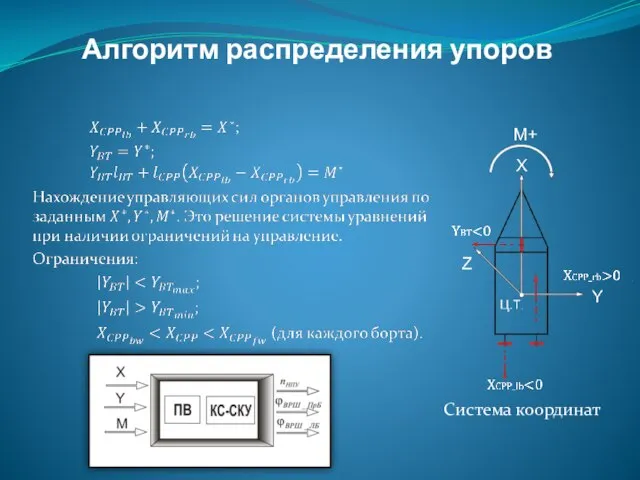
Алгоритм распределения упоров
Система координат
Слайд 7Определение упоров ВРШ
Диаграммы ВРШ
Зависимость упора ВРШ от
относительного шага ВРШ
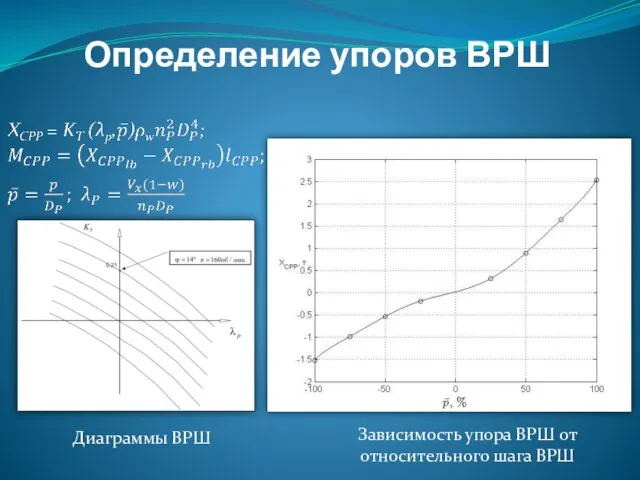
Определение упоров ВРШ
Диаграммы ВРШ
Зависимость упора ВРШ от
относительного шага ВРШ
Слайд 9Определение упоров НПУ
Зависимость упора НПУ
от относительной частоты вращения НПУ
Определение упоров НПУ
Зависимость упора НПУ
от относительной частоты вращения НПУ
Слайд 10Маневр для определения упоров ВРШ
Маневр для определения упора НПУ
Маневры для определения соотношения
Маневр для определения упоров ВРШ
Маневр для определения упора НПУ
Маневры для определения соотношения
Слайд 11Методы оценки ускорения
Фильтрация во временной области:
запаздывание
необходимость оценивать имеющиеся шумы и возмущения
Фильтрация в
Методы оценки ускорения
Фильтрация во временной области:
запаздывание
необходимость оценивать имеющиеся шумы и возмущения
Фильтрация в
Слайд 12Выбор оконной функции
Выбор оконной функции
Слайд 13Подготовка сигнала к фильтрации в частотной области
Преобразование сигнала с целью получения
Подготовка сигнала к фильтрации в частотной области
Преобразование сигнала с целью получения
Слайд 14Фильтрация сигнала в частотной области
Фильтрация сигнала в частотной области
Слайд 15Пример фильтрации в частотной области
Пример фильтрации в частотной области
Слайд 16Данные тестовых маневров и результаты обработки
Данные тестовых маневров и результаты обработки
Слайд 17Полученные результаты
Полученные результаты
Слайд 18Результаты работу СКУ
Траектория движения корабля в режиме управления «Удержание курса»
Траектория движения
Результаты работу СКУ
Траектория движения корабля в режиме управления «Удержание курса»
Траектория движения
Слайд 19Заключение
Предложена методика определения упоров ВРШ и НПУ для обеспечения работу СКУ на
Заключение
Предложена методика определения упоров ВРШ и НПУ для обеспечения работу СКУ на
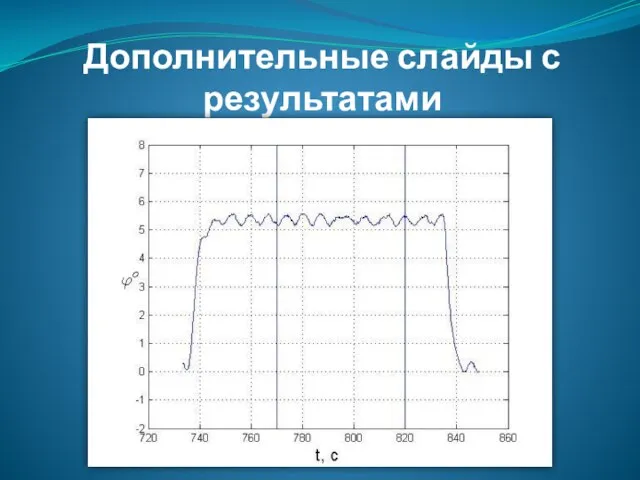
Слайд 20Дополнительные слайды с результатами
Дополнительные слайды с результатами
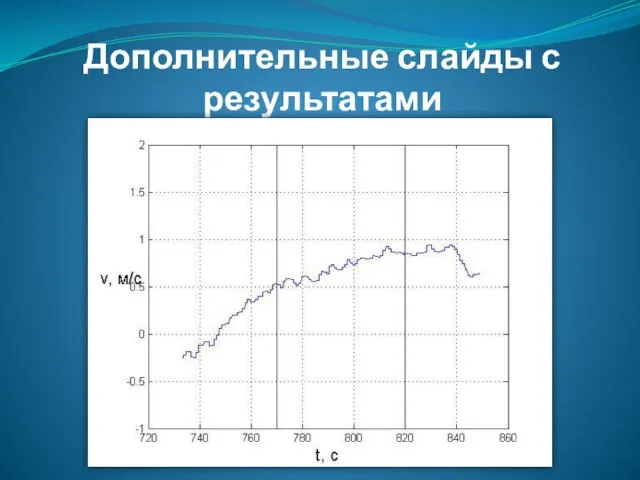
Слайд 21Дополнительные слайды с результатами
Дополнительные слайды с результатами
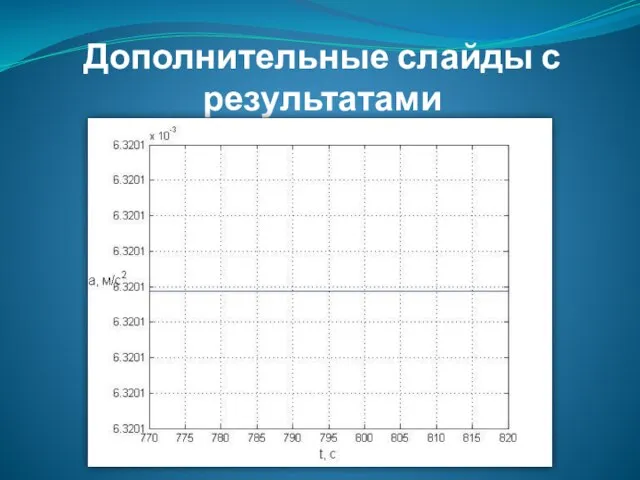
Слайд 22Дополнительные слайды с результатами
Дополнительные слайды с результатами

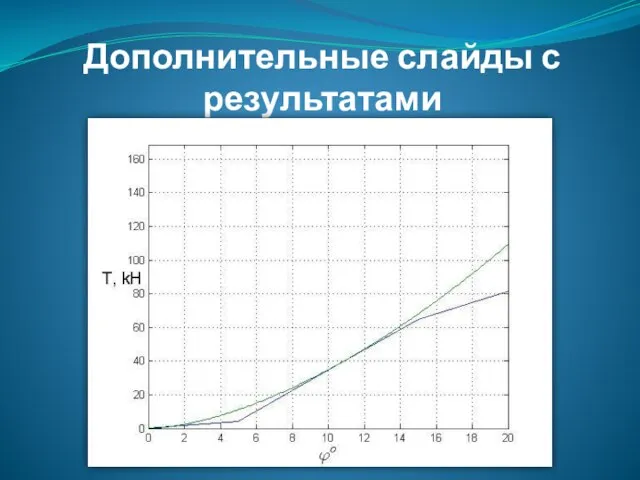
Слайд 23Дополнительные слайды с результатами
Дополнительные слайды с результатами
Слайд 24Дополнительные слайды с результатами
Дополнительные слайды с результатами
 Муниципальное дошкольное образовательное учреждение «Центр развития ребенка – детский сад № 9» Проект «В поисках лета»
Муниципальное дошкольное образовательное учреждение «Центр развития ребенка – детский сад № 9» Проект «В поисках лета» Изменения в нормативной правовой базе ЕГЭ в 2012 г.
Изменения в нормативной правовой базе ЕГЭ в 2012 г. Работа выполнена в рамках проекта: «Повышение квалификации различных категорий работников образования и формирование у них базов
Работа выполнена в рамках проекта: «Повышение квалификации различных категорий работников образования и формирование у них базов Смольный институт благородных девиц
Смольный институт благородных девиц НАПРАВЛЕНИЯ ДЕЯТЕЛЬНОСТИ ЦЕНТРА ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА И КОММЕРЦИАЛИЗАЦИЯ НАУЧНЫХ ИССЛЕДОВАНИЙ
НАПРАВЛЕНИЯ ДЕЯТЕЛЬНОСТИ ЦЕНТРА ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА И КОММЕРЦИАЛИЗАЦИЯ НАУЧНЫХ ИССЛЕДОВАНИЙ Презентация на тему Человек и животные 2 класс
Презентация на тему Человек и животные 2 класс  ФРАНЦІЯ: ВІД МОНАРХІI ДО РЕСПУБЛІКИ
ФРАНЦІЯ: ВІД МОНАРХІI ДО РЕСПУБЛІКИ  20161006_tema_uroka_5_klass_svyaz_muzyki_i_literatury
20161006_tema_uroka_5_klass_svyaz_muzyki_i_literatury Процедура оказания услуги удостоверяющего центра (УЦ). Проверка предоставленных сведений в УЦ
Процедура оказания услуги удостоверяющего центра (УЦ). Проверка предоставленных сведений в УЦ Отдел Покрытосеменные. Характеристика и значение
Отдел Покрытосеменные. Характеристика и значение Публицистический стиль речи: особенности, жанры, сфера употребления
Публицистический стиль речи: особенности, жанры, сфера употребления הַ יְלָ ִדים רֹוצִ ים ִללמֹוד ִע ְב ִרית בֶּ אּולפַ ן ֶהחָ ָדׁש
הַ יְלָ ִדים רֹוצִ ים ִללמֹוד ִע ְב ִרית בֶּ אּולפַ ן ֶהחָ ָדׁש Деловое совещание
Деловое совещание Тема урока: «Знакомство с бытом и жилищем казаков». Подготовила:
Тема урока: «Знакомство с бытом и жилищем казаков». Подготовила:  Пунктуация в сложном предложении
Пунктуация в сложном предложении Ростехнадзор. Объект контроля
Ростехнадзор. Объект контроля Союз Поволжья
Союз Поволжья Поздравление с Днем Защитника Отечества
Поздравление с Днем Защитника Отечества Презентация на тему НАЧАЛО РАЗДРОБЛЕННОСТИ НА РУСИ
Презентация на тему НАЧАЛО РАЗДРОБЛЕННОСТИ НА РУСИ  Презентация на тему Художественная культура Исламского Востока
Презентация на тему Художественная культура Исламского Востока Избирательные фонды кандидатов
Избирательные фонды кандидатов Конференция.
Конференция. Аланин
Аланин ДОБРО ПОЖАЛОВАТЬ НА ЗАВОД LG ELECTRONICSВ РОССИИ !
ДОБРО ПОЖАЛОВАТЬ НА ЗАВОД LG ELECTRONICSВ РОССИИ ! История открытия
История открытия Що я знаю про Power Point
Що я знаю про Power Point Твой дом. Твой стиль
Твой дом. Твой стиль Почвенные ресурсы России 8 класс
Почвенные ресурсы России 8 класс