- Оптимальное управление ХТС с учетом робастности

Содержание
- 2. Цель и задачи: Разработка системы автоматического управления колонной К-110 блока стабилизации бензина установки гидроочистки дизельного топлива.
- 3. Установка Л-24/6 Основная продукция установки: - стабильное гидроочищенное дизельное топливо; - гидроочищенное сырье установок «Парекс-1,2»; -
- 4. Технологическая схема блока стабилизации бензина 3
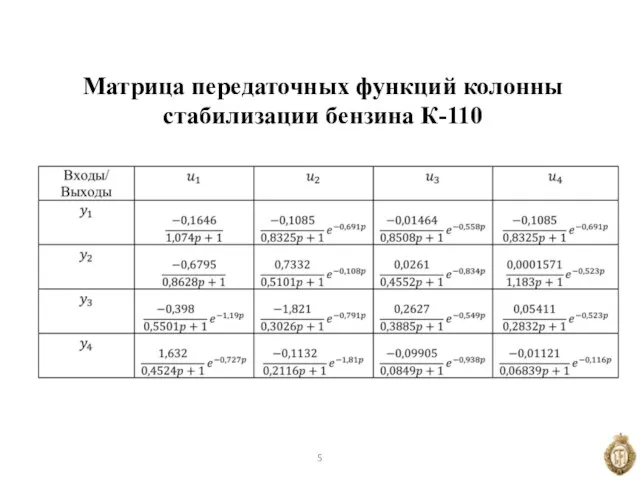
- 5. Матрица передаточных функций колонны стабилизации бензина К-110 5
- 6. Разработка системы автоматического управления с ПИ-регуляторами 6
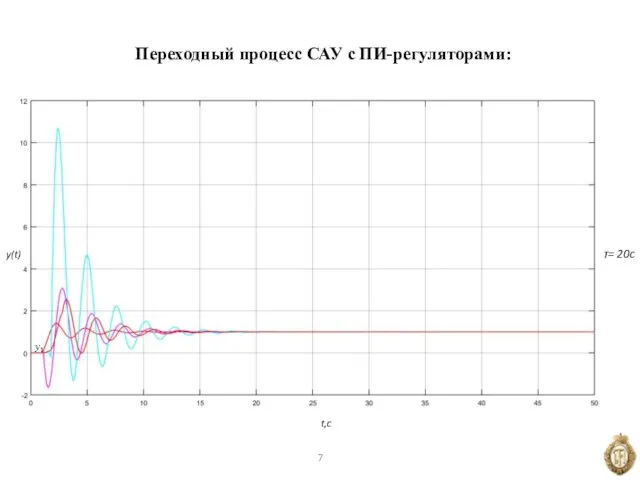
- 7. Переходный процесс САУ с ПИ-регуляторами: y(t) t,c τ= 20c 7
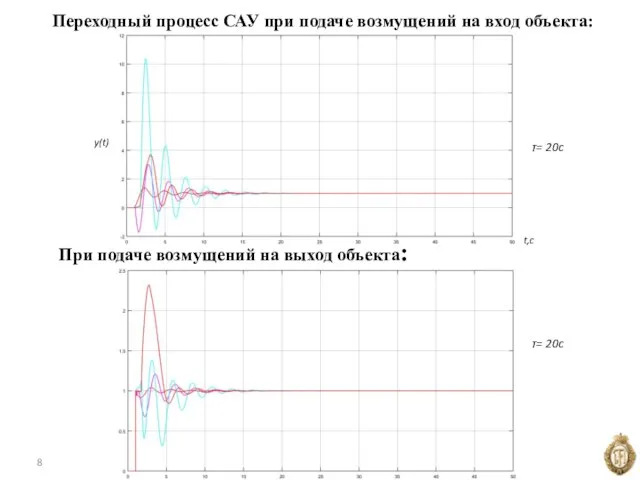
- 8. Переходный процесс САУ при подаче возмущений на вход объекта: При подаче возмущений на выход объекта: y(t)
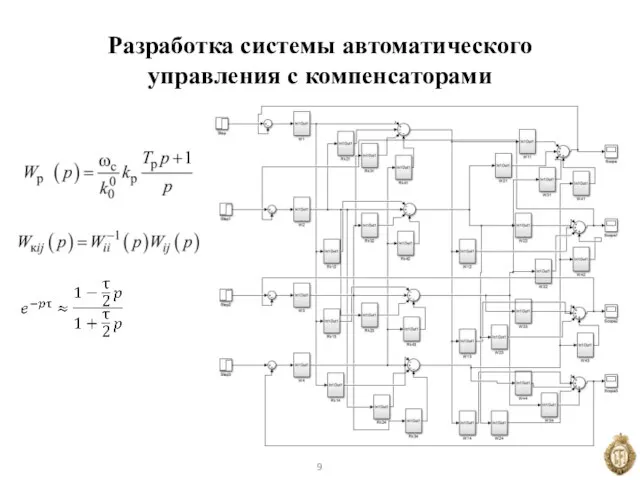
- 9. Разработка системы автоматического управления с компенсаторами 9
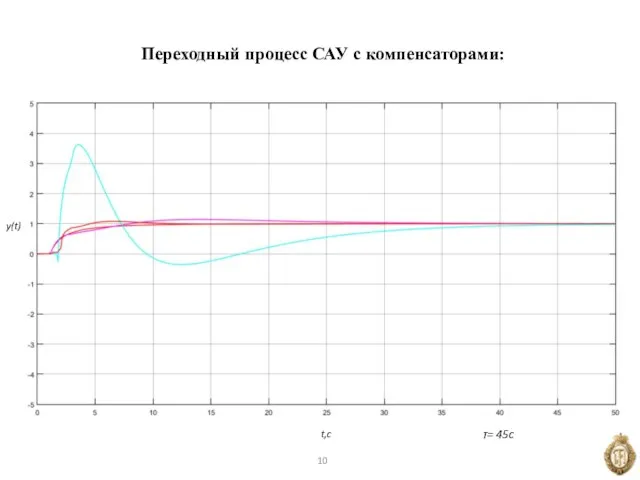
- 10. Переходный процесс САУ с компенсаторами: y(t) t,c τ= 45c 10
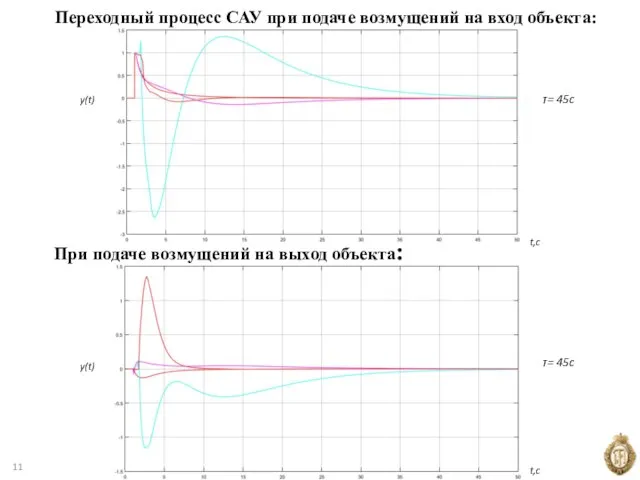
- 11. Переходный процесс САУ при подаче возмущений на вход объекта: При подаче возмущений на выход объекта: y(t)
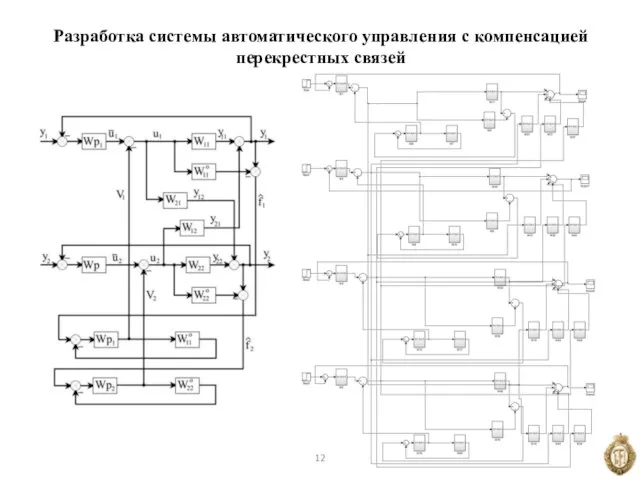
- 12. Разработка системы автоматического управления с компенсацией перекрестных связей 12
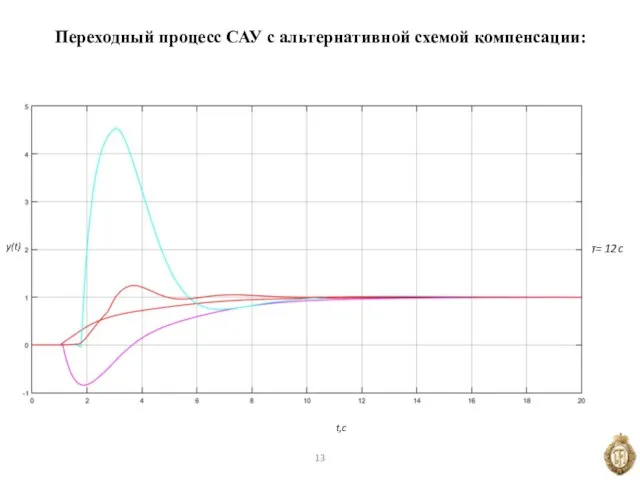
- 13. Переходный процесс САУ с альтернативной схемой компенсации: y(t) t,c τ= 12c 13
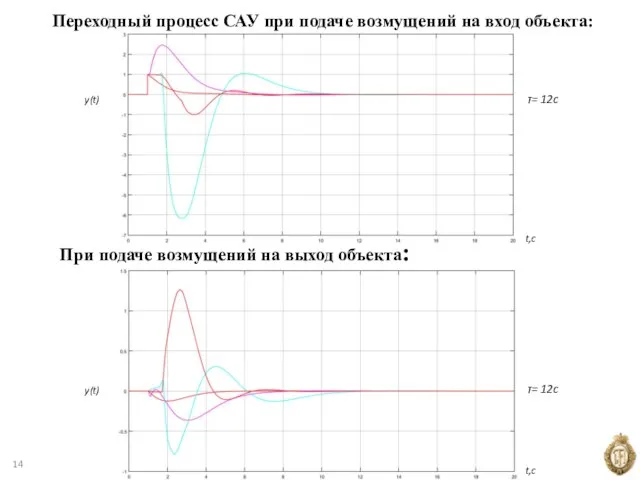
- 14. При подаче возмущений на выход объекта: Переходный процесс САУ при подаче возмущений на вход объекта: y(t)
- 15. Выводы по работе: Колонна стабилизации бензина К-110 рассмотрена как многомерный объект с запаздыванием. В ходе данной
- 17. Скачать презентацию
Слайд 2Цель и задачи:
Разработка системы автоматического управления колонной К-110 блока стабилизации бензина установки
Цель и задачи:
Разработка системы автоматического управления колонной К-110 блока стабилизации бензина установки
Слайд 3Установка Л-24/6
Основная продукция установки:
- стабильное гидроочищенное дизельное топливо;
- гидроочищенное сырье установок «Парекс-1,2»;
Установка Л-24/6
Основная продукция установки:
- стабильное гидроочищенное дизельное топливо;
- гидроочищенное сырье установок «Парекс-1,2»;

Слайд 4Технологическая схема блока стабилизации бензина
3
Технологическая схема блока стабилизации бензина
3

Слайд 5Матрица передаточных функций колонны стабилизации бензина К-110
5
Матрица передаточных функций колонны стабилизации бензина К-110
5
Слайд 6Разработка системы автоматического управления с ПИ-регуляторами
6
Разработка системы автоматического управления с ПИ-регуляторами
6

Слайд 7Переходный процесс САУ с ПИ-регуляторами:
y(t)
t,c
τ= 20c
7
Переходный процесс САУ с ПИ-регуляторами:
y(t)
t,c
τ= 20c
7
Слайд 8Переходный процесс САУ при подаче возмущений на вход объекта:
При подаче возмущений
Переходный процесс САУ при подаче возмущений на вход объекта:
При подаче возмущений
Слайд 9Разработка системы автоматического управления с компенсаторами
9
Разработка системы автоматического управления с компенсаторами
9
Слайд 10Переходный процесс САУ с компенсаторами:
y(t)
t,c
τ= 45c
10
Переходный процесс САУ с компенсаторами:
y(t)
t,c
τ= 45c
10
Слайд 11Переходный процесс САУ при подаче возмущений на вход объекта:
При подаче возмущений
Переходный процесс САУ при подаче возмущений на вход объекта:
При подаче возмущений
Слайд 12Разработка системы автоматического управления с компенсацией перекрестных связей
12
Разработка системы автоматического управления с компенсацией перекрестных связей
12
Слайд 13Переходный процесс САУ с альтернативной схемой компенсации:
y(t)
t,c
τ= 12c
13
Переходный процесс САУ с альтернативной схемой компенсации:
y(t)
t,c
τ= 12c
13
Слайд 14При подаче возмущений на выход объекта:
Переходный процесс САУ при подаче возмущений на
При подаче возмущений на выход объекта:
Переходный процесс САУ при подаче возмущений на
Слайд 15Выводы по работе:
Колонна стабилизации бензина К-110 рассмотрена как многомерный объект с запаздыванием.
Выводы по работе:
Колонна стабилизации бензина К-110 рассмотрена как многомерный объект с запаздыванием.
 Основымолекулярной генетики
Основымолекулярной генетики Портрет в художественном мире Л.Н. Толстого
Портрет в художественном мире Л.Н. Толстого Апробация ИУМК «Использование и обслуживание периферийного и офисного оборудования» и «Использование и обслуживание средств ИКТ
Апробация ИУМК «Использование и обслуживание периферийного и офисного оборудования» и «Использование и обслуживание средств ИКТ Профессиональный тренинг Уровня 1
Профессиональный тренинг Уровня 1 Классный час«Спортсмены Кубани – во славу России! Василий Мачуга и Владимир Почивалов.»
Классный час«Спортсмены Кубани – во славу России! Василий Мачуга и Владимир Почивалов.» Корректировка норм тепловизионного обследования
Корректировка норм тепловизионного обследования Онтогенез человека
Онтогенез человека Невероятные приключения Алисы
Невероятные приключения Алисы 20170717_urok_30_kartochki_s_voprosami_dlya_5_gruppy
20170717_urok_30_kartochki_s_voprosami_dlya_5_gruppy Посуда: стекло, пластмасса, дерево, керамика
Посуда: стекло, пластмасса, дерево, керамика Компьютер и искусство
Компьютер и искусство Мастер-класс по вязанию элемента ирландского кружева – листочка
Мастер-класс по вязанию элемента ирландского кружева – листочка 5 октябряКлассная работа
5 октябряКлассная работа Презентация на тему Фонетика. Методика Прокудиной А. В.
Презентация на тему Фонетика. Методика Прокудиной А. В. Рекламные баннерные сети
Рекламные баннерные сети Вторичные преобразования пород океанической коры
Вторичные преобразования пород океанической коры Государственная (итоговая) аттестация в 9 классах в новой форме: особенности организации и проведения в 2012 году в РХ
Государственная (итоговая) аттестация в 9 классах в новой форме: особенности организации и проведения в 2012 году в РХ Карандашный рисунок. Ежик. 1 класс
Карандашный рисунок. Ежик. 1 класс Русская народная матрёшка
Русская народная матрёшка Презентация на тему Риск-ориентированный подход в осуществлении надзора и контроля ТК
Презентация на тему Риск-ориентированный подход в осуществлении надзора и контроля ТК  Региональные независимые телеканалы Казахстана:сохранение и развитие.Астана25 февраля 2011 г.
Региональные независимые телеканалы Казахстана:сохранение и развитие.Астана25 февраля 2011 г. Способы снятия стресса
Способы снятия стресса Автомат розроб сайтів
Автомат розроб сайтів Презентация на тему Времена года
Презентация на тему Времена года Презентация на тему Ощущения и восприятия
Презентация на тему Ощущения и восприятия 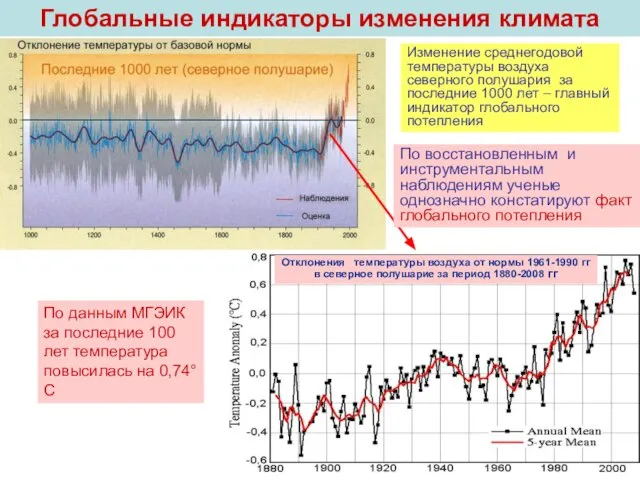 Глобальные индикаторы изменения климата
Глобальные индикаторы изменения климата Презентация на тему Песни и стихи о Великой Отечественной Войне
Презентация на тему Песни и стихи о Великой Отечественной Войне Исследовательская деятельность учащихся начальных классов
Исследовательская деятельность учащихся начальных классов