- Ориентирование робота в пространстве и распознавание окружающей среды

Содержание
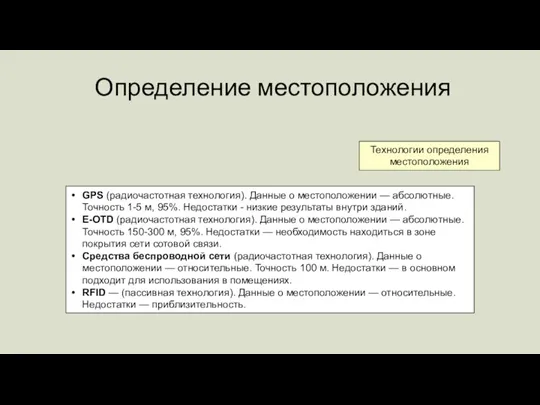
- 2. Определение местоположения Технологии определения местоположения GPS (радиочастотная технология). Данные о местоположении — абсолютные. Точность 1-5 м,
- 3. Определение местоположения GPS
- 4. Определение местоположения E-OTD Enhanced Observed Time Difference (E-OTD) is a technology for identifying the location of
- 5. Определение местоположения Средства беспроводной сети Когда устройство находится в радиусе действия нескольких Wi-Fi-сетей, оно может использовать
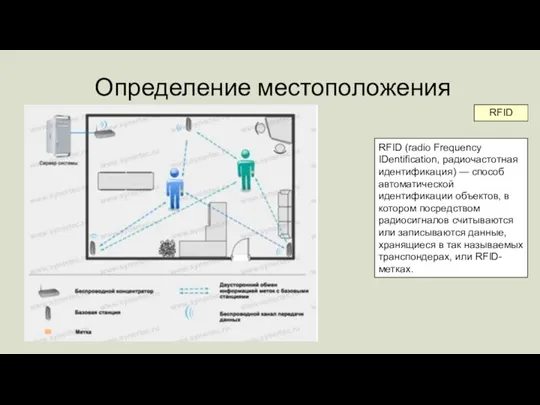
- 6. Определение местоположения RFID RFID (radio Frequency IDentification, радиочастотная идентификация) — способ автоматической идентификации объектов, в котором
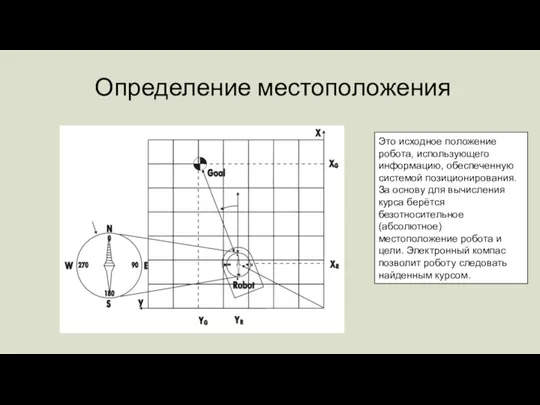
- 7. Определение местоположения Это исходное положение робота, использующего информацию, обеспеченную системой позиционирования. За основу для вычисления курса
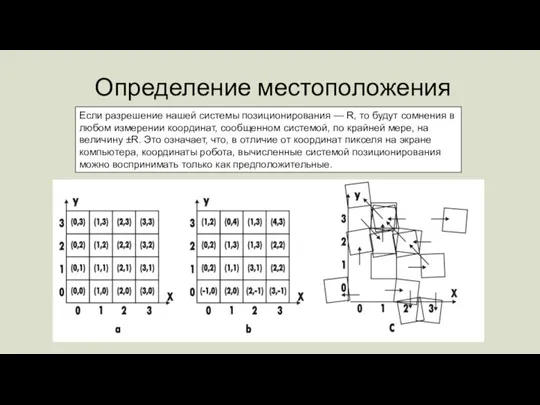
- 8. Определение местоположения Если разрешение нашей системы позиционирования — R, то будут сомнения в любом измерении координат,
- 9. Датчики, реагирующие на воздействия окружающей робота среды Предназначен для ис пользования в системах: регистрации дорожно-транспортных происшествий
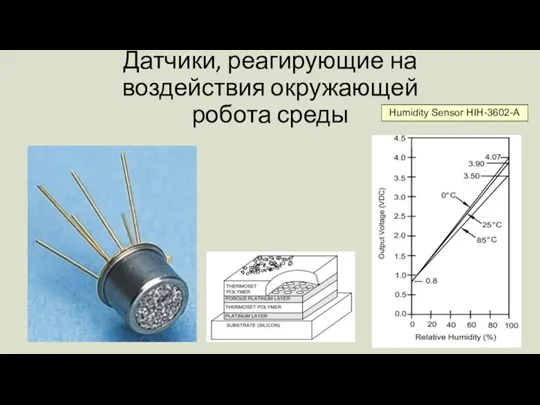
- 10. Датчики, реагирующие на воздействия окружающей робота среды Humidity Sensor HIH-3602-A
- 11. Датчики, реагирующие на воздействия окружающей робота среды Gas Pressure Sensor 40PC015G1A
- 13. Скачать презентацию
Слайд 2Определение местоположения
Технологии определения местоположения
GPS (радиочастотная технология). Данные о местоположении — абсолютные. Точность
Определение местоположения
Технологии определения местоположения
GPS (радиочастотная технология). Данные о местоположении — абсолютные. Точность
Слайд 3Определение местоположения
GPS
Определение местоположения
GPS

Слайд 4Определение местоположения
E-OTD
Enhanced Observed Time Difference (E-OTD) is a technology for identifying the
Определение местоположения
E-OTD
Enhanced Observed Time Difference (E-OTD) is a technology for identifying the

Слайд 5Определение местоположения
Средства беспроводной сети
Когда устройство находится в радиусе действия нескольких Wi-Fi-сетей, оно
Определение местоположения
Средства беспроводной сети
Когда устройство находится в радиусе действия нескольких Wi-Fi-сетей, оно

Слайд 6Определение местоположения
RFID
RFID (radio Frequency IDentification, радиочастотная идентификация) — способ автоматической идентификации объектов,
Определение местоположения
RFID
RFID (radio Frequency IDentification, радиочастотная идентификация) — способ автоматической идентификации объектов,
Слайд 7Определение местоположения
Это исходное положение робота, использующего информацию, обеспеченную системой позиционирования. За основу
Определение местоположения
Это исходное положение робота, использующего информацию, обеспеченную системой позиционирования. За основу
Слайд 8Определение местоположения
Если разрешение нашей системы позиционирования — R, то будут сомнения в
Определение местоположения
Если разрешение нашей системы позиционирования — R, то будут сомнения в
Слайд 9Датчики, реагирующие на воздействия окружающей робота среды
Предназначен для ис пользования в системах:
регистрации
Датчики, реагирующие на воздействия окружающей робота среды
Предназначен для ис пользования в системах:
регистрации
Слайд 10Датчики, реагирующие на воздействия окружающей робота среды
Humidity Sensor HIH-3602-A
Датчики, реагирующие на воздействия окружающей робота среды
Humidity Sensor HIH-3602-A
Слайд 11Датчики, реагирующие на воздействия окружающей робота среды
Gas Pressure Sensor 40PC015G1A
Датчики, реагирующие на воздействия окружающей робота среды
Gas Pressure Sensor 40PC015G1A

 ИТС ПРОФ - профессиональная информационная система для бухгалтераи руководителя
ИТС ПРОФ - профессиональная информационная система для бухгалтераи руководителя EasyMani
EasyMani Pepsi - участник фестиваля Пикник Афиша
Pepsi - участник фестиваля Пикник Афиша Именины Загоскина М.Н
Именины Загоскина М.Н Исаак Бабель
Исаак Бабель В некотором царстве,В некотором государстве,вернее в ТюрлемеЖивет своей жизнью
В некотором царстве,В некотором государстве,вернее в ТюрлемеЖивет своей жизнью Памятники Гоголю
Памятники Гоголю Правила безопасного обращения с бытовыми электроприборами
Правила безопасного обращения с бытовыми электроприборами Черная металлургия
Черная металлургия Психолого-педагогическая диагностика
Психолого-педагогическая диагностика Рукописные книги
Рукописные книги Использование приёмов технологии развития критического мышления при написании части «С».
Использование приёмов технологии развития критического мышления при написании части «С». МЕДИЦИНСКАЯ И БИОЛОГИЧЕСКАЯ ФИЗИКА
МЕДИЦИНСКАЯ И БИОЛОГИЧЕСКАЯ ФИЗИКА Передача жилых домов в управление
Передача жилых домов в управление Aleksander Sergeevich PUSHKIN 1799-1837
Aleksander Sergeevich PUSHKIN 1799-1837 Сергей Александрович Есенин.(1895-1925)
Сергей Александрович Есенин.(1895-1925) Презентация на тему "Будни и праздники 5 класса" - скачать презентации по Педагогике
Презентация на тему "Будни и праздники 5 класса" - скачать презентации по Педагогике Эпоха возрождения
Эпоха возрождения Интуитивные решения. Интуитивное мышление
Интуитивные решения. Интуитивное мышление Ведение реестра организаций отдыха детей и их оздоровления , расположенных на территории Свердловской области
Ведение реестра организаций отдыха детей и их оздоровления , расположенных на территории Свердловской области экстр пси ДПО
экстр пси ДПО Профессии в области хореографии
Профессии в области хореографии Изменение величин
Изменение величин Поведение во время грозы
Поведение во время грозы Тайна бумажного листа
Тайна бумажного листа Воспитательная программа «Любознайки»
Воспитательная программа «Любознайки» Век Просвещения
Век Просвещения Проблемный метод обученияв преподавании истории
Проблемный метод обученияв преподавании истории