- Основы теории игр

Содержание
- 2. Занятие 1.4. «Способы определения несущей частоты сигналов» Лекция Вопросы: Поисковые способы определения несущей частоты сигналов. 2.
- 3. Поисковые способы определения fС tПРМ f = ТПРМ ΔfПРМ /ΔfР 3
- 4. Поисковые способы определения fС Медленный поиск 1) tПРМ f N ТП 2) ТПРМ tОБЛ (ΔfПРМ /ΔfР)
- 5. Поисковый разведывательный приемник 5
- 6. Многоканальный приемник 6
- 7. Матричный приемник (структурная схема) 7
- 8. Матричный приемник (АЧХ ступеней) fC изм = fmin + ΔfР/m[(i – 1) + (j – 1)/m
- 9. Интерференционный измеритель Ψ1 =ωС Δl/2V + ωС l/V. eББ (t) = Е0 cosωC (Δl/2V) cos(ωCt -Ψ1),
- 10. Корреляционный измеритель u5 = K5 U2m u4 = K3 K4 U2m cos(ωС tзад)/2 u2(t) = u1(t
- 12. Скачать презентацию
Слайд 2Занятие 1.4. «Способы определения несущей частоты сигналов»
Лекция
Вопросы:
Поисковые способы определения несущей
Занятие 1.4. «Способы определения несущей частоты сигналов»
Лекция
Вопросы:
Поисковые способы определения несущей
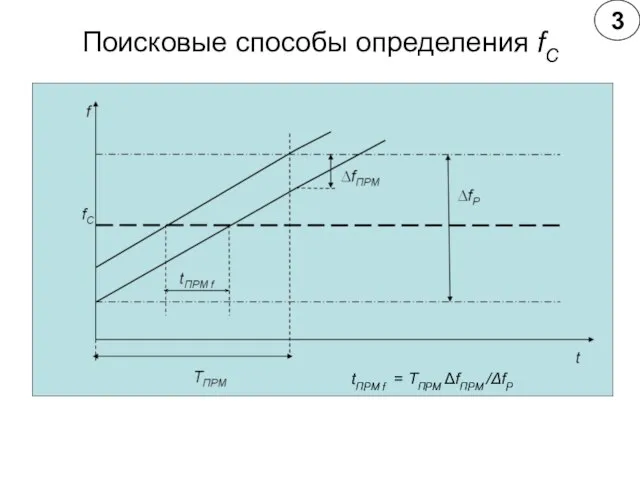
Слайд 3Поисковые способы определения fС
tПРМ f = ТПРМ ΔfПРМ /ΔfР
3
Поисковые способы определения fС
tПРМ f = ТПРМ ΔfПРМ /ΔfР
3
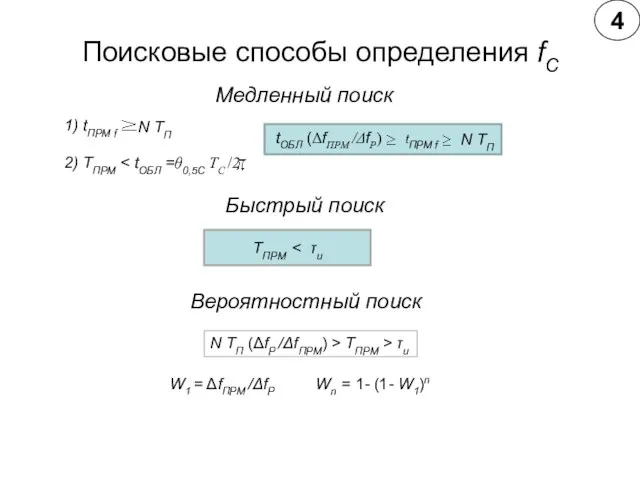
Слайд 4Поисковые способы определения fС
Медленный поиск
1) tПРМ f
N ТП
2)
Поисковые способы определения fС
Медленный поиск
1) tПРМ f
N ТП
2)
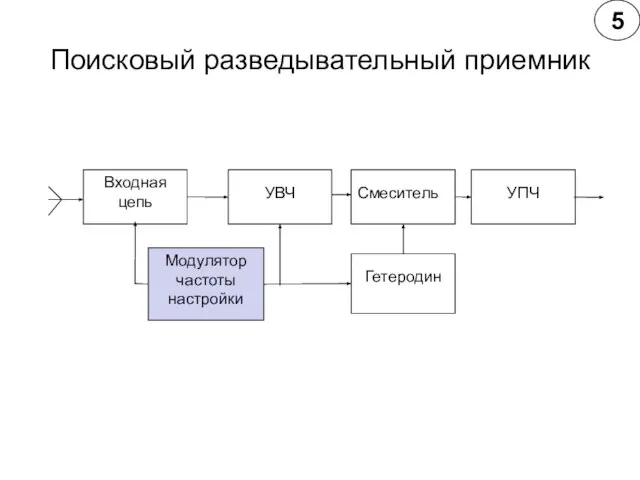
Слайд 5Поисковый разведывательный приемник
5
Поисковый разведывательный приемник
5
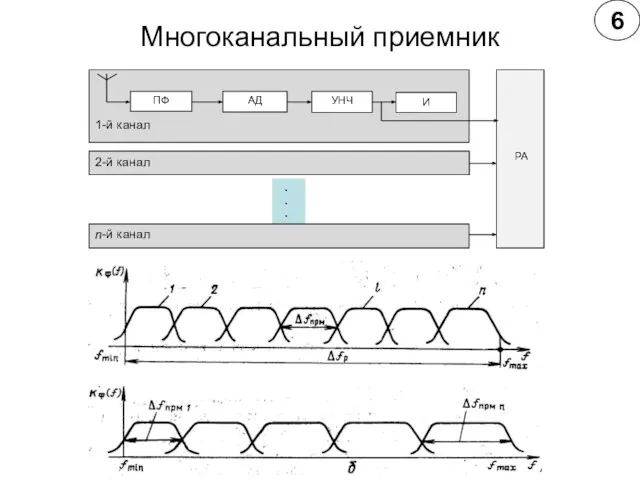
Слайд 6Многоканальный приемник
6
Многоканальный приемник
6
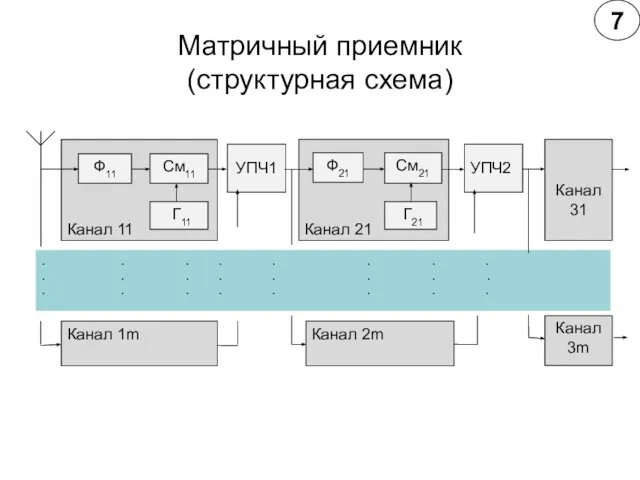
Слайд 7Матричный приемник
(структурная схема)
7
Матричный приемник
(структурная схема)
7
Слайд 8Матричный приемник (АЧХ ступеней)
fC изм = fmin + ΔfР/m[(i – 1)
Матричный приемник (АЧХ ступеней)
fC изм = fmin + ΔfР/m[(i – 1)

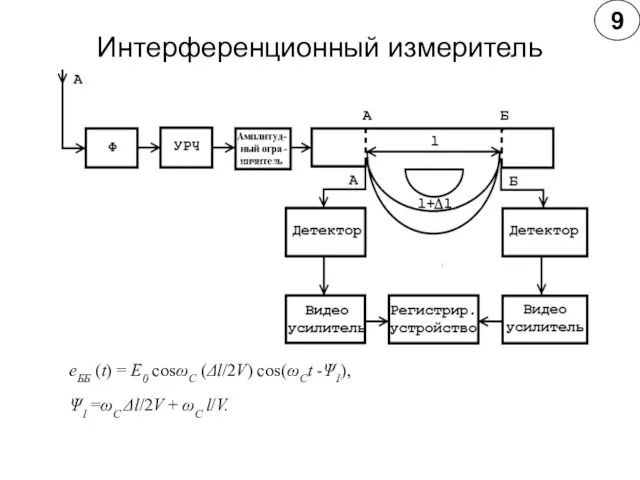
Слайд 9Интерференционный измеритель
Ψ1 =ωС Δl/2V + ωС l/V.
eББ (t) = Е0 cosωC
Интерференционный измеритель
Ψ1 =ωС Δl/2V + ωС l/V.
eББ (t) = Е0 cosωC
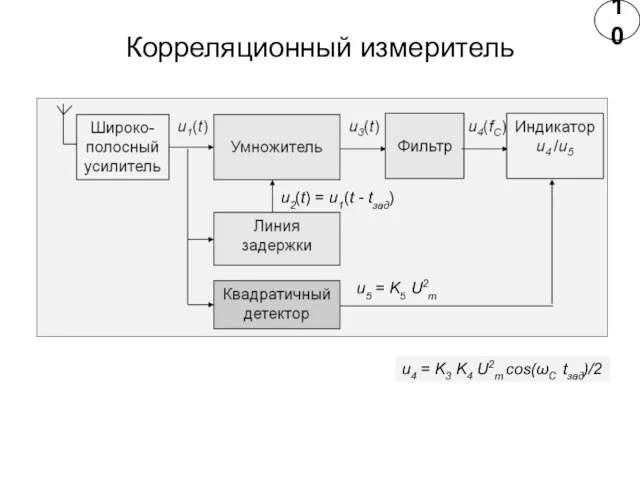
Слайд 10Корреляционный измеритель
u5 = K5 U2m
u4 = K3 K4 U2m cos(ωС tзад)/2
u2(t)
Корреляционный измеритель
u5 = K5 U2m
u4 = K3 K4 U2m cos(ωС tзад)/2
u2(t)
 Моделирование физических явлений
Моделирование физических явлений Вирусы в нашей жизни
Вирусы в нашей жизни Что такое симметрия_ Как получить симметричные детали. (1)
Что такое симметрия_ Как получить симметричные детали. (1) Презентация на тему На фронтах второй мировой войны
Презентация на тему На фронтах второй мировой войны  Забытые и современные виды спорта
Забытые и современные виды спорта Объем прямоугольного параллелепипеда 5 класс
Объем прямоугольного параллелепипеда 5 класс Освоение космоса
Освоение космоса ДЕЙСТВИЯ ПРИ ЖЕЛЕЗНОДОРОЖНОЙ АВАРИИ
ДЕЙСТВИЯ ПРИ ЖЕЛЕЗНОДОРОЖНОЙ АВАРИИ Праздничный пир в теремных палатах
Праздничный пир в теремных палатах Трение не учитывать нельзя
Трение не учитывать нельзя Childe Harold vs Евгений Онегин
Childe Harold vs Евгений Онегин Потребитель – король на рынке
Потребитель – король на рынке Эффективные приемы, используемые на уроках в начальной школе
Эффективные приемы, используемые на уроках в начальной школе 51 Любит лишь Христос
51 Любит лишь Христос Типология людей по А. Е. Личко, Г. Юнгу, Э. Кречмеру
Типология людей по А. Е. Личко, Г. Юнгу, Э. Кречмеру Doc
Doc Презентация на тему Презентация по экономической географии Кабардино-Балкарская республика
Презентация на тему Презентация по экономической географии Кабардино-Балкарская республика  Летние каникулы в Крыму
Летние каникулы в Крыму Практические аспекты мониторинга программ
Практические аспекты мониторинга программ Влагостойкое напольное покрытие. Коллекция AQUAFLOOR STONE
Влагостойкое напольное покрытие. Коллекция AQUAFLOOR STONE Нейрофармакологические и психотропные свойства АЭП при лечении эпилепсии
Нейрофармакологические и психотропные свойства АЭП при лечении эпилепсии Квиллинг – бумажная филигрань
Квиллинг – бумажная филигрань Экономические индексы
Экономические индексы Иисус, Ты Царь царей, Господь наш,Ты царишь над всей землей;Победил врагов Своих на ГолгофеИ воссел не троне Ты.Да, Ты Царь наш, Цар
Иисус, Ты Царь царей, Господь наш,Ты царишь над всей землей;Победил врагов Своих на ГолгофеИ воссел не троне Ты.Да, Ты Царь наш, Цар Character Traits
Character Traits АНАЛИЗ РАБОТЫ ШКОЛЫ
АНАЛИЗ РАБОТЫ ШКОЛЫ Buckingham Palace
Buckingham Palace Presentation Title
Presentation Title