- Особенности автоматизации конвейерного транспорта

Содержание
- 2. Тема- «Особенности автоматизации конвейерного транспорта» Цель: Изучить особенности автоматизации конвейерного транспорта
- 3. Управление конвейерными линиями в простейшем случае заключается в пуске и останове электродвигателей, приводящих в действие тяговые
- 4. 1. Не менее чем за 5 с перед пуском первого конвейера и перед дозапуском части линии
- 5. 4. Пуск каждого последующего конвейера разрешается после достижения тяговым органом предыдущего конвейера рабочей скорости. Такая блокировка
- 6. . Для конвейерного транспорта существенное значение имеет надежность его работы. Нарушения в работе оборудования могут привести
- 7. Кроме перечисленных блокировок существует еще ряд других, связанных с безопасностью перевозки людей на грузо–пассажирских конвейерах, предотвращением
- 8. Для обеспечения надежной и безопасной работы конвейерных установок используется большое число различных средств автоматического контроля и
- 9. Датчик контроля схода ленты КСЛ-2 осуществляет контроль аварийного схода ленты в сторону. Датчик состоит из корпуса,
- 10. Датчик контроля заштыбовки ДЗШ предназначен для контроля мест пересыпов горной массы с конвейера на конвейер, а
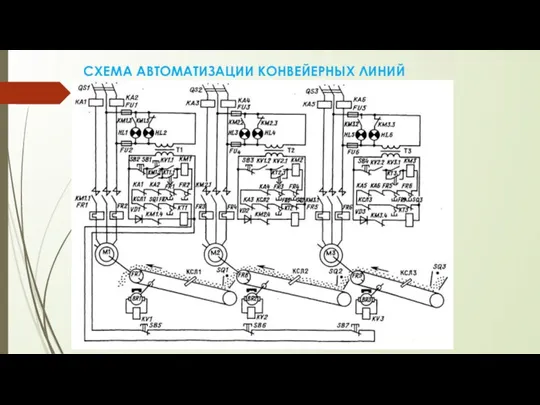
- 11. СХЕМА АВТОМАТИЗАЦИИ КОНВЕЙЕРНЫХ ЛИНИЙ
- 12. Домашнее задание- самостоятельно изучить принцип работы схемы в документе «Принцип работы схемы автоматизации конвейерной линии.docx» на
- 14. Скачать презентацию
Слайд 2Тема- «Особенности автоматизации конвейерного транспорта»
Цель: Изучить особенности автоматизации конвейерного транспорта
Тема- «Особенности автоматизации конвейерного транспорта»
Цель: Изучить особенности автоматизации конвейерного транспорта
Слайд 3
Управление конвейерными линиями в простейшем случае заключается в пуске и останове
Управление конвейерными линиями в простейшем случае заключается в пуске и останове
Слайд 41. Не менее чем за 5 с перед пуском первого конвейера и
1. Не менее чем за 5 с перед пуском первого конвейера и
Слайд 54. Пуск каждого последующего конвейера разрешается после достижения тяговым органом предыдущего конвейера
4. Пуск каждого последующего конвейера разрешается после достижения тяговым органом предыдущего конвейера
Слайд 6.
Для конвейерного транспорта существенное значение имеет надежность его работы. Нарушения в
.
Для конвейерного транспорта существенное значение имеет надежность его работы. Нарушения в
Слайд 7Кроме перечисленных блокировок существует еще ряд других, связанных с безопасностью перевозки людей
Кроме перечисленных блокировок существует еще ряд других, связанных с безопасностью перевозки людей
Слайд 8Для обеспечения надежной и безопасной работы конвейерных установок используется большое число различных
Для обеспечения надежной и безопасной работы конвейерных установок используется большое число различных
Слайд 9Датчик контроля схода ленты КСЛ-2
осуществляет контроль аварийного схода ленты в сторону. Датчик
Датчик контроля схода ленты КСЛ-2
осуществляет контроль аварийного схода ленты в сторону. Датчик
Слайд 10Датчик контроля заштыбовки ДЗШ
предназначен для контроля мест пересыпов горной массы с конвейера
Датчик контроля заштыбовки ДЗШ
предназначен для контроля мест пересыпов горной массы с конвейера
Слайд 11СХЕМА АВТОМАТИЗАЦИИ КОНВЕЙЕРНЫХ ЛИНИЙ
СХЕМА АВТОМАТИЗАЦИИ КОНВЕЙЕРНЫХ ЛИНИЙ
Слайд 12Домашнее задание-
самостоятельно изучить принцип работы схемы в документе «Принцип работы схемы автоматизации
Домашнее задание- самостоятельно изучить принцип работы схемы в документе «Принцип работы схемы автоматизации
 Особенности композиции романа И.А.Гончарова «Обломов»
Особенности композиции романа И.А.Гончарова «Обломов» Б Проект Некрасов2017
Б Проект Некрасов2017 Игра Самый умный
Игра Самый умный Романтические образы в творчестве Ф.Шопена
Романтические образы в творчестве Ф.Шопена Приглашение на работу в ООО Трансметрогрупп
Приглашение на работу в ООО Трансметрогрупп Бизнес Предложения Сервисы в области обеспечения качества
Бизнес Предложения Сервисы в области обеспечения качества Аттестация педагогических работников муниципальных и государственных образовательных учреждений
Аттестация педагогических работников муниципальных и государственных образовательных учреждений Картины С. Боттичелли по дисциплине История искусств
Картины С. Боттичелли по дисциплине История искусств Классическая 3-х этапная системная модель Г. Саймона принятия решений. Достоинства и недостатки. Тема 3
Классическая 3-х этапная системная модель Г. Саймона принятия решений. Достоинства и недостатки. Тема 3 خطة الفعاليات 2019
خطة الفعاليات 2019 Лицей №1
Лицей №1 Ecological situation in Chelyabinsk region
Ecological situation in Chelyabinsk region Итальянский дворик 1941-1944
Итальянский дворик 1941-1944 Романтический герой
Романтический герой Вред курения
Вред курения Организация перевозки внешнеторговых грузов воздушным транспортом Дисциплина: Международные перевозки грузов Преподаватель: д
Организация перевозки внешнеторговых грузов воздушным транспортом Дисциплина: Международные перевозки грузов Преподаватель: д Основные варианты расположения корней квадратного трехчлена.
Основные варианты расположения корней квадратного трехчлена. Tarp vizijos ir realybės... Esybių sąryšių modeliavimas
Tarp vizijos ir realybės... Esybių sąryšių modeliavimas Зависимость силы тока от напряжения. Электрическое сопротивление проводников
Зависимость силы тока от напряжения. Электрическое сопротивление проводников Любовь возвышает великие души Ф. Шиллер От любви к женщине родилось все прекрасное на земле М. Горький.
Любовь возвышает великие души Ф. Шиллер От любви к женщине родилось все прекрасное на земле М. Горький. Декоративно-прикладное искусство в жизни человека. Русская народная вышивка
Декоративно-прикладное искусство в жизни человека. Русская народная вышивка Половое размножение организмов. Развитие половых клеток. Оплодотворение
Половое размножение организмов. Развитие половых клеток. Оплодотворение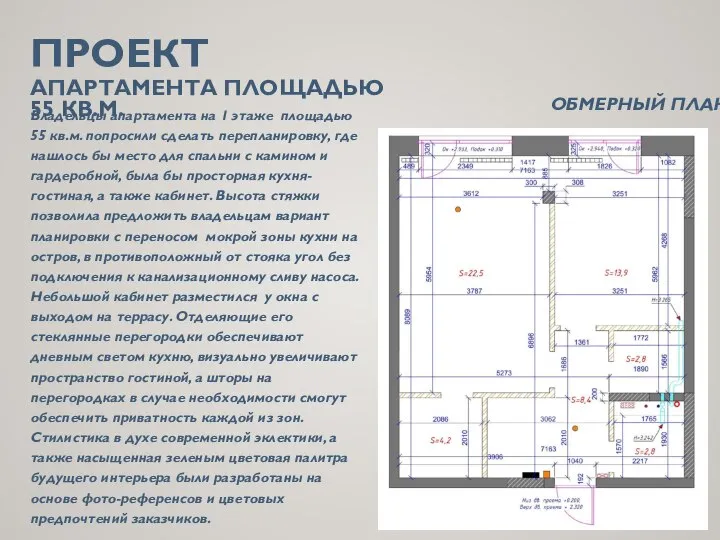 Планировочное решение
Планировочное решение Najszlachetniejsze rozwiązanie
Najszlachetniejsze rozwiązanie Асимптотические свойства адронной материи
Асимптотические свойства адронной материи Обустройство тротуаров в г. Слободском
Обустройство тротуаров в г. Слободском Куликовская битва 6-8 класс
Куликовская битва 6-8 класс LegoCar. Коммерческое предложение по SMM и таргетированной рекламе
LegoCar. Коммерческое предложение по SMM и таргетированной рекламе