Программный инструмент 4GN для разработки интеллектуальных систем на основе бионического метода «Автономного адаптивного управл
- Программный инструмент 4GN для разработки интеллектуальных систем на основе бионического метода «Автономного адаптивного управл

Содержание
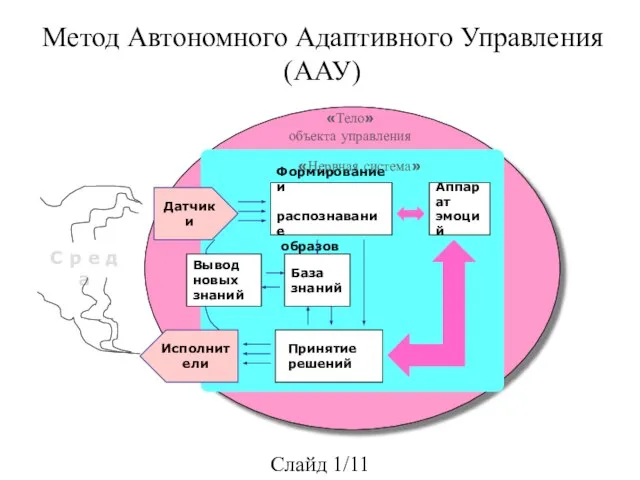
- 2. Метод Автономного Адаптивного Управления (ААУ) Cлайд 1/11
- 3. Задачи решаемые системой ААУ автоматическая классификация распознавание образов исследование функциональных свойств заданного объекта управления и среды
- 4. Особенности метода ААУ Совмещение в одном процессе обучения и управления Адаптация к изменяющимся свойствам объекта управления
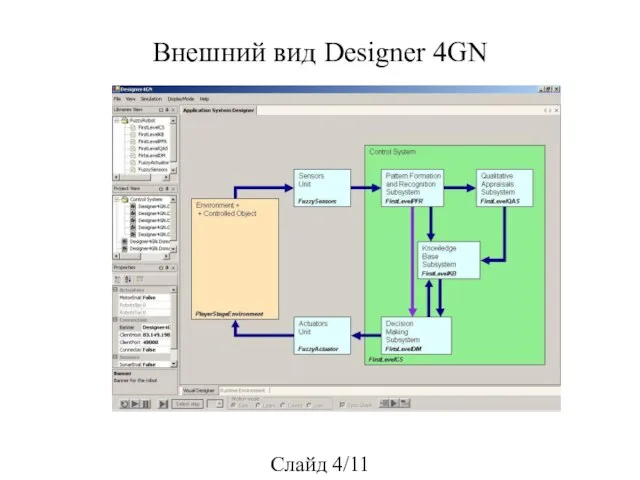
- 5. Внешний вид Designer 4GN Cлайд 4/11
- 6. Основные компоненты 4GN библиотека готовых модулей систем управления визуальный дизайнер для сборки блоков редактор сетевых структур
- 7. Возможности системы визуализации отображение зависимости значения одной переменной от времени; значения двух переменных (фазовая плоскость); зависимость
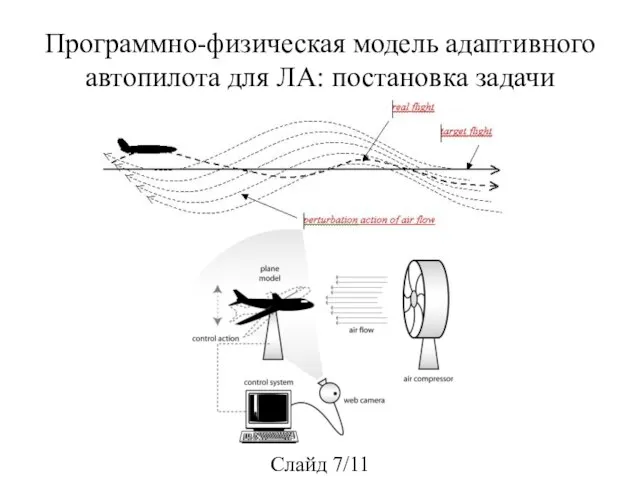
- 8. Программно-физическая модель адаптивного автопилота для ЛА: постановка задачи Cлайд 7/11
- 9. Стенд для моделирования эксперимента Cлайд 8/11
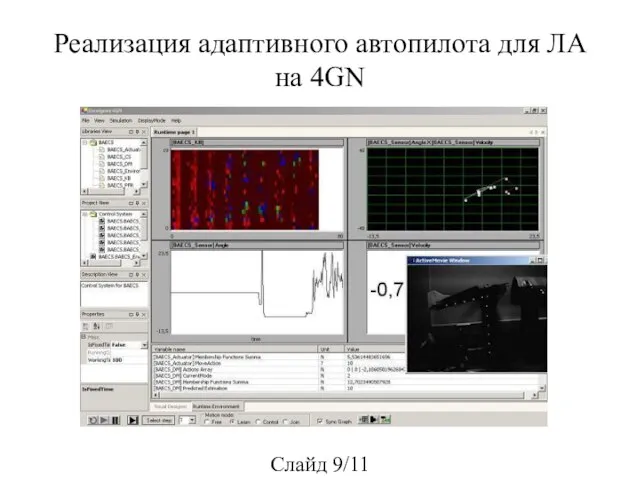
- 10. Реализация адаптивного автопилота для ЛА на 4GN Cлайд 9/11
- 11. Другие приложения, построенные при помощи Designer 4GN Система стабилизации углового движения автоматического космического аппарата «Спектр-РГ» Система
- 12. Особенности 4GN гибкий визуальный дизайн управляющих систем возможность совмещать несколько технологий ИИ в одной системе возможность
- 14. Скачать презентацию
Слайд 3Задачи решаемые системой ААУ
автоматическая классификация
распознавание образов
исследование функциональных свойств заданного объекта управления и
Задачи решаемые системой ААУ
автоматическая классификация
распознавание образов
исследование функциональных свойств заданного объекта управления и
Слайд 4Особенности метода ААУ
Совмещение в одном процессе обучения и управления
Адаптация к изменяющимся
Особенности метода ААУ
Совмещение в одном процессе обучения и управления
Адаптация к изменяющимся
Слайд 5Внешний вид Designer 4GN
Cлайд 4/11
Внешний вид Designer 4GN
Cлайд 4/11
Слайд 6Основные компоненты 4GN
библиотека готовых модулей систем управления
визуальный дизайнер для сборки блоков
редактор сетевых
Основные компоненты 4GN
библиотека готовых модулей систем управления
визуальный дизайнер для сборки блоков
редактор сетевых
Слайд 7Возможности системы визуализации
отображение зависимости значения одной переменной от времени;
значения двух переменных (фазовая
Возможности системы визуализации
отображение зависимости значения одной переменной от времени;
значения двух переменных (фазовая
Слайд 8Программно-физическая модель адаптивного автопилота для ЛА: постановка задачи
Cлайд 7/11
Программно-физическая модель адаптивного автопилота для ЛА: постановка задачи
Cлайд 7/11
Слайд 9Стенд для моделирования эксперимента
Cлайд 8/11
Стенд для моделирования эксперимента
Cлайд 8/11

Слайд 10Реализация адаптивного автопилота для ЛА на 4GN
Cлайд 9/11
Реализация адаптивного автопилота для ЛА на 4GN
Cлайд 9/11
Слайд 11Другие приложения, построенные
при помощи Designer 4GN
Система стабилизации углового движения автоматического космического аппарата
Другие приложения, построенные
при помощи Designer 4GN
Система стабилизации углового движения автоматического космического аппарата
Слайд 12Особенности 4GN
гибкий визуальный дизайн управляющих систем
возможность совмещать несколько технологий ИИ в одной
Особенности 4GN
гибкий визуальный дизайн управляющих систем
возможность совмещать несколько технологий ИИ в одной
 Турнир по рывку Золотая осень - 2016
Турнир по рывку Золотая осень - 2016 Живая классика. Всероссийский конкурс
Живая классика. Всероссийский конкурс Презентация на тему Австралия 2 класс
Презентация на тему Австралия 2 класс Анатомия органа зрения
Анатомия органа зрения Ребенок и компьютерные игры
Ребенок и компьютерные игры Воздействие высокоскоростных магистралей на окружающую среду
Воздействие высокоскоростных магистралей на окружающую среду Афанасий Афанасьевич Фет 1820-1892
Афанасий Афанасьевич Фет 1820-1892 Новые технологии!
Новые технологии! ПРАЗДНИК СЛАВЯНСКОЙ ПИСЬМЕННОСТИ
ПРАЗДНИК СЛАВЯНСКОЙ ПИСЬМЕННОСТИ Русская прялка. 5 класс
Русская прялка. 5 класс Решение уравнений «В мире звезд» Урок математики в 6 классе
Решение уравнений «В мире звезд» Урок математики в 6 классе Способы образования причастий
Способы образования причастий Презентация на тему Искусство андерграунда
Презентация на тему Искусство андерграунда  Критерии различения правовых систем и правовых семей и развитие юридической карты мира
Критерии различения правовых систем и правовых семей и развитие юридической карты мира Чем компенсировать слабость? Занятие для 2 взрослого разряда
Чем компенсировать слабость? Занятие для 2 взрослого разряда Центр правового и финансового консалтинга
Центр правового и финансового консалтинга Четыре измерения медиаконвергенции
Четыре измерения медиаконвергенции Вопросы к деловой игре по сказке Репка
Вопросы к деловой игре по сказке Репка Современная живопись
Современная живопись 9 Экономический и политический кризис начала 20-х гг. Переход к нэпу
9 Экономический и политический кризис начала 20-х гг. Переход к нэпу Презентация_МР_Чистодей
Презентация_МР_Чистодей Рисунок. Экзамен
Рисунок. Экзамен Учет личностных особенностей участников педагогического процесса в условиях инновационного развития
Учет личностных особенностей участников педагогического процесса в условиях инновационного развития Презентация на тему Причуды паразитизма
Презентация на тему Причуды паразитизма Планирование работы при написании проекта
Планирование работы при написании проекта Культура и образование
Культура и образование Интерьер учебной аудитории 507, учебного корпуса №2 ГБПОУ РО РСК Ростов на Дону
Интерьер учебной аудитории 507, учебного корпуса №2 ГБПОУ РО РСК Ростов на Дону Более 2500 магазинов глобально .. www.ecosway.msk.ru.
Более 2500 магазинов глобально .. www.ecosway.msk.ru.