- ПЛАНИРОВАНИЕ ЭКСПЕРИМЕНТА

Содержание
- 2. Что такое планирование эксперимента Целью планирования эксперимента является создание таких планов покачивания входных переменных, которые обеспечивают
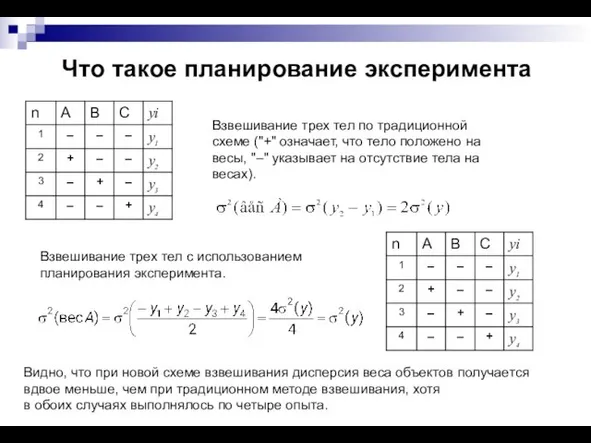
- 3. Что такое планирование эксперимента Взвешивание трех тел по традиционной схеме ("+" означает, что тело положено на
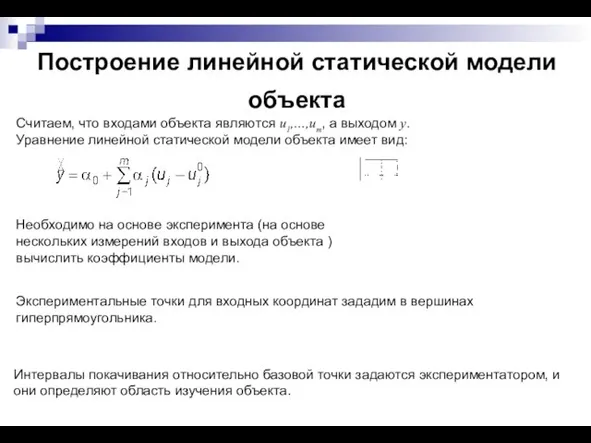
- 4. Построение линейной статической модели объекта Считаем, что входами объекта являются u1,…,um, а выходом y. Уравнение линейной
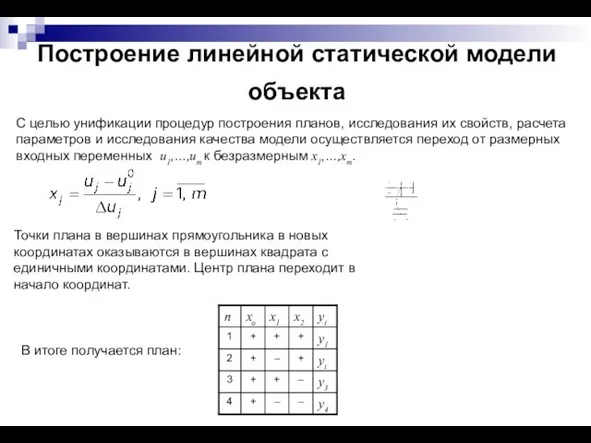
- 5. Построение линейной статической модели объекта С целью унификации процедур построения планов, исследования их свойств, расчета параметров
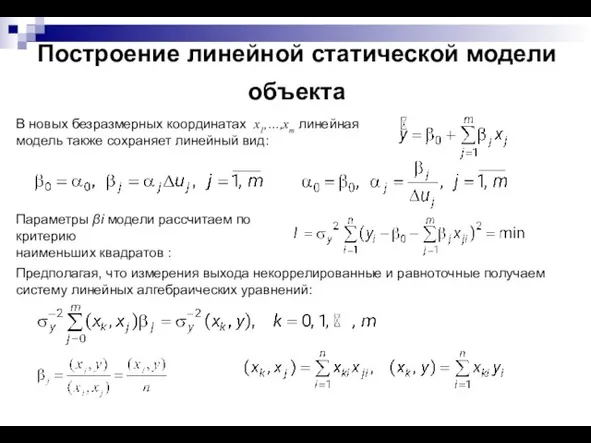
- 6. Построение линейной статической модели объекта В новых безразмерных координатах x1,…,xm линейная модель также сохраняет линейный вид:
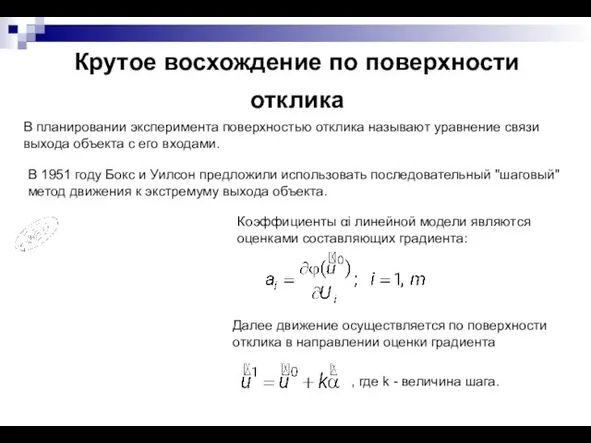
- 7. Крутое восхождение по поверхности отклика В планировании эксперимента поверхностью отклика называют уравнение связи выхода объекта с
- 8. Полный факторный эксперимент Полным факторным экспериментом называется эксперимент, в котором реализуются все возможные сочетания уровней факторов.
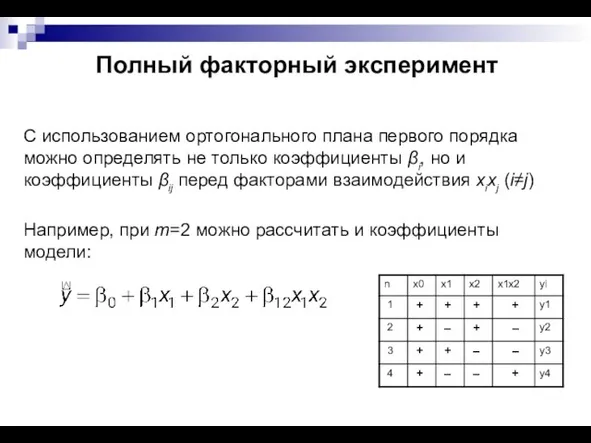
- 9. Полный факторный эксперимент С использованием ортогонального плана первого порядка можно определять не только коэффициенты βi, но
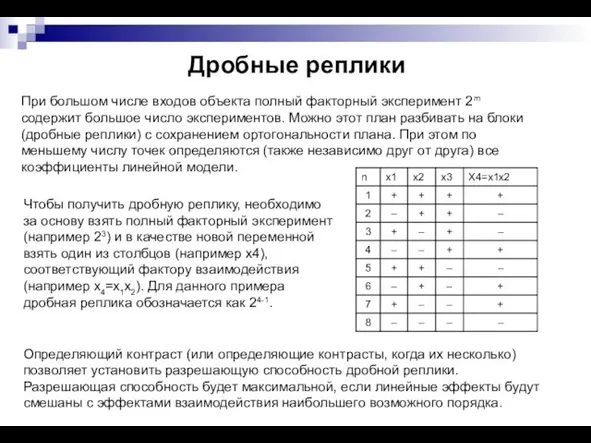
- 10. Дробные реплики При большом числе входов объекта полный факторный эксперимент 2m содержит большое число экспериментов. Можно
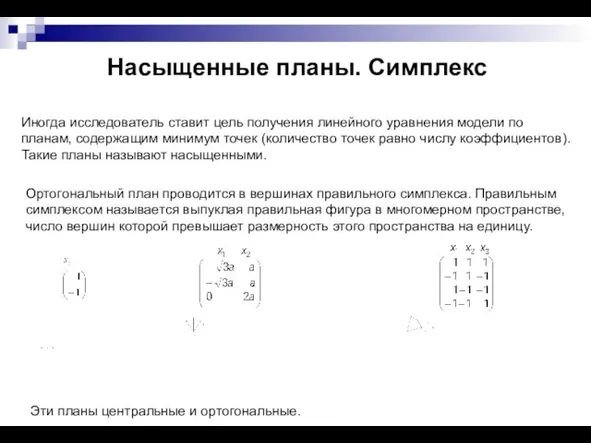
- 11. Насыщенные планы. Симплекс Иногда исследователь ставит цель получения линейного уравнения модели по планам, содержащим минимум точек
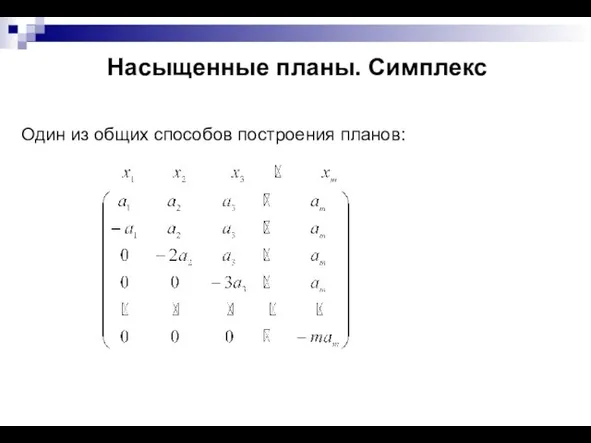
- 12. Насыщенные планы. Симплекс Один из общих способов построения планов:
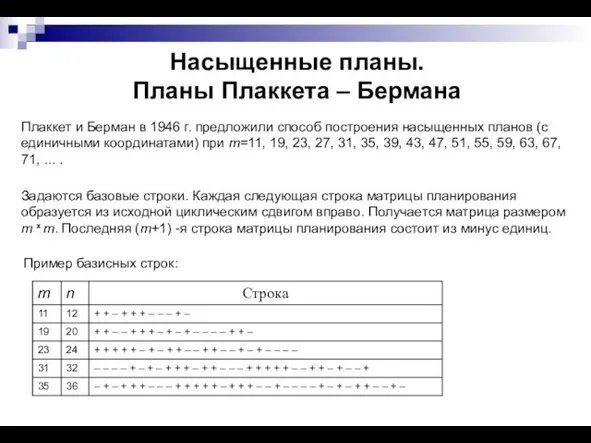
- 13. Насыщенные планы. Планы Плаккета – Бермана Плаккет и Берман в 1946 г. предложили способ построения насыщенных
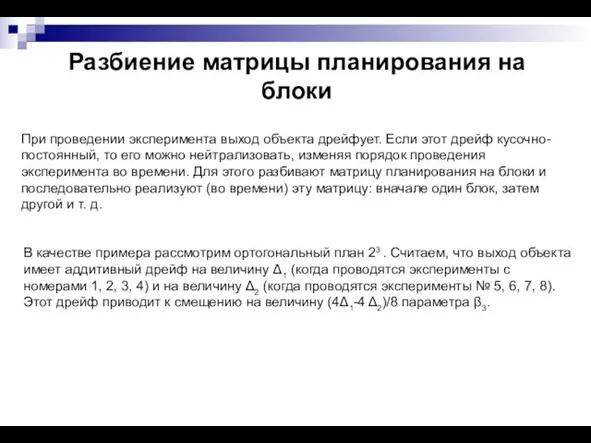
- 14. Разбиение матрицы планирования на блоки При проведении эксперимента выход объекта дрейфует. Если этот дрейф кусочно-постоянный, то
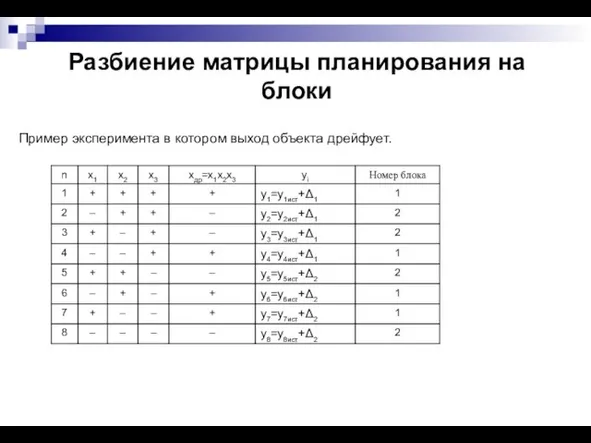
- 15. Разбиение матрицы планирования на блоки Пример эксперимента в котором выход объекта дрейфует.
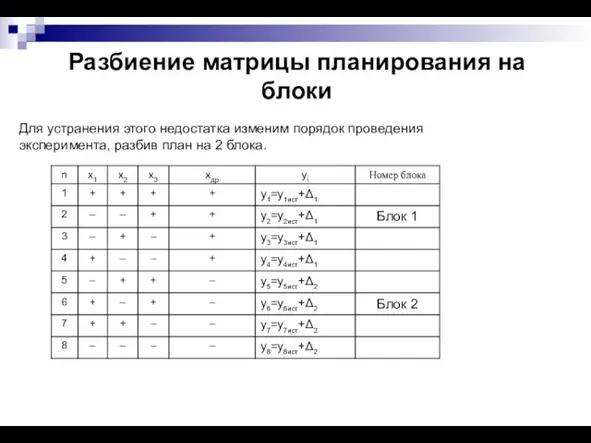
- 16. Разбиение матрицы планирования на блоки Для устранения этого недостатка изменим порядок проведения эксперимента, разбив план на
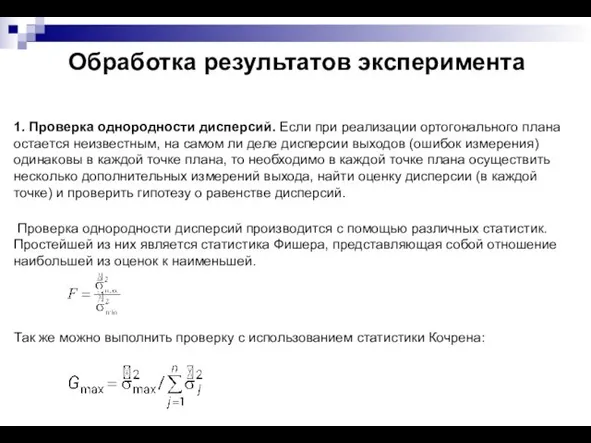
- 17. Обработка результатов эксперимента 1. Проверка однородности дисперсий. Если при реализации ортогонального плана остается неизвестным, на самом
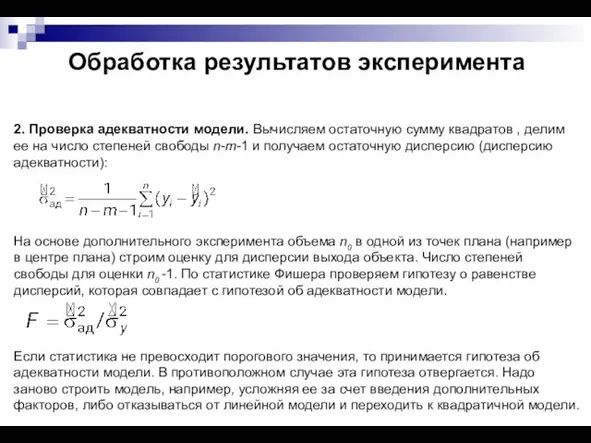
- 18. Обработка результатов эксперимента 2. Проверка адекватности модели. Вычисляем остаточную сумму квадратов , делим ее на число
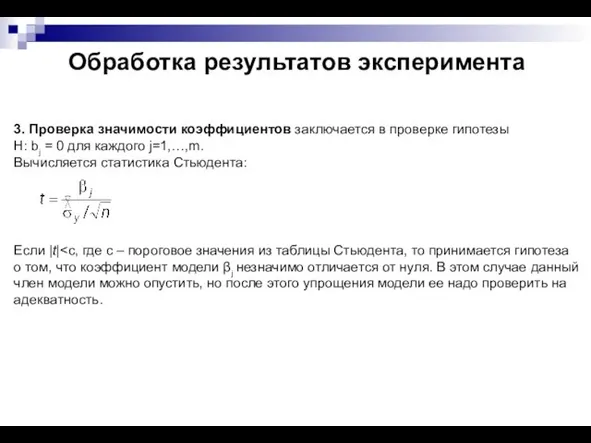
- 19. Обработка результатов эксперимента 3. Проверка значимости коэффициентов заключается в проверке гипотезы H: bj = 0 для
- 20. Обработка результатов эксперимента 4. Интерпретация модели. Производится качественное сопоставление поведения полученной модели с реальными процессами объекта.
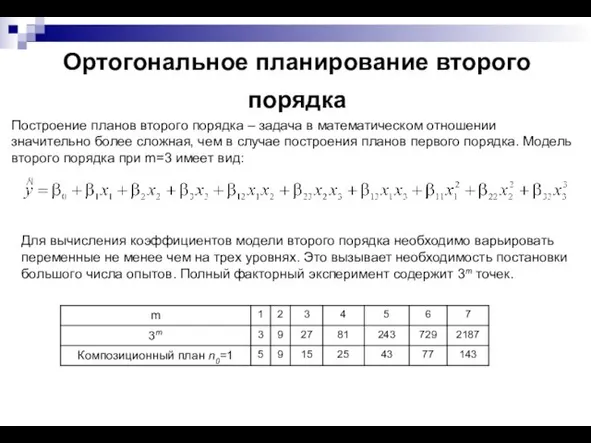
- 21. Ортогональное планирование второго порядка Построение планов второго порядка – задача в математическом отношении значительно более сложная,
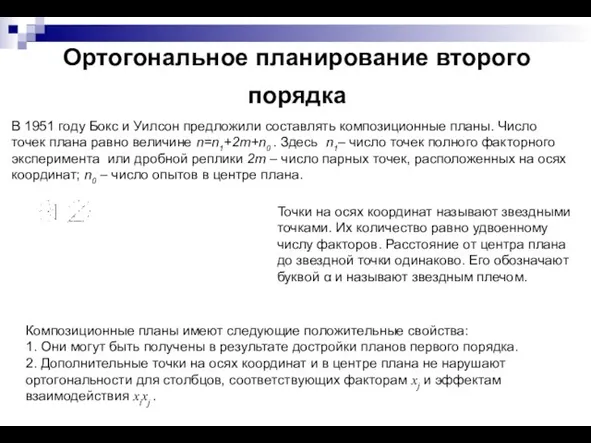
- 22. Ортогональное планирование второго порядка В 1951 году Бокс и Уилсон предложили составлять композиционные планы. Число точек
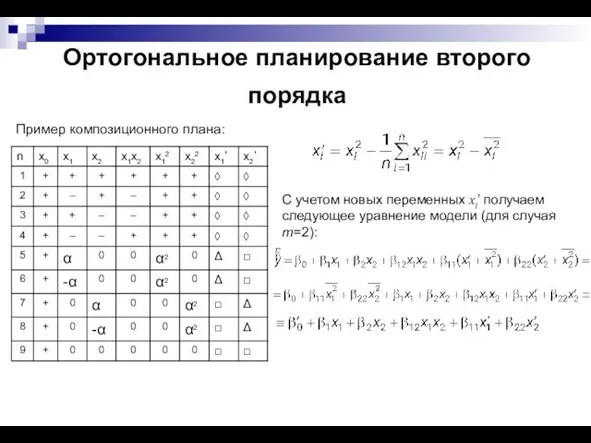
- 23. Ортогональное планирование второго порядка Пример композиционного плана: С учетом новых переменных xl’ получаем следующее уравнение модели
- 24. Ротатабельное планирование Если эта дисперсия одинакова на равном удалении от центра плана, то такой план называется
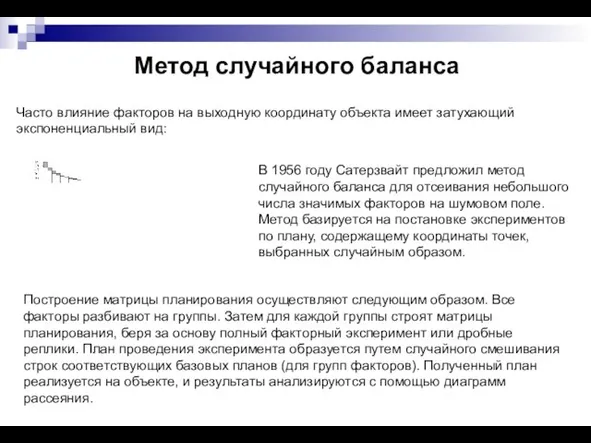
- 25. Метод случайного баланса Часто влияние факторов на выходную координату объекта имеет затухающий экспоненциальный вид: В 1956
- 27. Скачать презентацию
Слайд 2Что такое планирование эксперимента
Целью планирования эксперимента является создание таких планов покачивания
Что такое планирование эксперимента
Целью планирования эксперимента является создание таких планов покачивания
Слайд 3Что такое планирование эксперимента
Взвешивание трех тел по традиционной схеме ("+" означает,
Что такое планирование эксперимента
Взвешивание трех тел по традиционной схеме ("+" означает,
Слайд 4Построение линейной статической модели объекта
Считаем, что входами объекта являются u1,…,um, а
Построение линейной статической модели объекта
Считаем, что входами объекта являются u1,…,um, а
Слайд 5Построение линейной статической модели объекта
С целью унификации процедур построения планов, исследования
Построение линейной статической модели объекта
С целью унификации процедур построения планов, исследования
Слайд 6Построение линейной статической модели объекта
В новых безразмерных координатах x1,…,xm линейная модель
Построение линейной статической модели объекта
В новых безразмерных координатах x1,…,xm линейная модель
Слайд 7Крутое восхождение по поверхности отклика
В планировании эксперимента поверхностью отклика называют уравнение
Крутое восхождение по поверхности отклика
В планировании эксперимента поверхностью отклика называют уравнение
Слайд 8Полный факторный эксперимент
Полным факторным экспериментом называется эксперимент, в котором реализуются все
Полный факторный эксперимент
Полным факторным экспериментом называется эксперимент, в котором реализуются все
Слайд 9Полный факторный эксперимент
С использованием ортогонального плана первого порядка можно определять не только
Полный факторный эксперимент
С использованием ортогонального плана первого порядка можно определять не только
Слайд 10Дробные реплики
При большом числе входов объекта полный факторный эксперимент 2m содержит большое
Дробные реплики
При большом числе входов объекта полный факторный эксперимент 2m содержит большое
Слайд 11Насыщенные планы. Симплекс
Иногда исследователь ставит цель получения линейного уравнения модели по
Насыщенные планы. Симплекс
Иногда исследователь ставит цель получения линейного уравнения модели по
Слайд 12Насыщенные планы. Симплекс
Один из общих способов построения планов:
Насыщенные планы. Симплекс
Один из общих способов построения планов:
Слайд 13Насыщенные планы.
Планы Плаккета – Бермана
Плаккет и Берман в 1946 г. предложили
Насыщенные планы.
Планы Плаккета – Бермана
Плаккет и Берман в 1946 г. предложили
Слайд 14Разбиение матрицы планирования на блоки
При проведении эксперимента выход объекта дрейфует. Если
Разбиение матрицы планирования на блоки
При проведении эксперимента выход объекта дрейфует. Если
Слайд 15Разбиение матрицы планирования на блоки
Пример эксперимента в котором выход объекта дрейфует.
Разбиение матрицы планирования на блоки
Пример эксперимента в котором выход объекта дрейфует.
Слайд 16Разбиение матрицы планирования на блоки
Для устранения этого недостатка изменим порядок проведения
Разбиение матрицы планирования на блоки
Для устранения этого недостатка изменим порядок проведения
Слайд 17Обработка результатов эксперимента
1. Проверка однородности дисперсий. Если при реализации ортогонального плана
Обработка результатов эксперимента
1. Проверка однородности дисперсий. Если при реализации ортогонального плана
Слайд 18Обработка результатов эксперимента
2. Проверка адекватности модели. Вычисляем остаточную сумму квадратов , делим
Обработка результатов эксперимента
2. Проверка адекватности модели. Вычисляем остаточную сумму квадратов , делим
Слайд 19Обработка результатов эксперимента
3. Проверка значимости коэффициентов заключается в проверке гипотезы
H: bj
Обработка результатов эксперимента
3. Проверка значимости коэффициентов заключается в проверке гипотезы H: bj
Слайд 20Обработка результатов эксперимента
4. Интерпретация модели. Производится качественное сопоставление поведения полученной модели
Обработка результатов эксперимента
4. Интерпретация модели. Производится качественное сопоставление поведения полученной модели
Слайд 21Ортогональное планирование второго порядка
Построение планов второго порядка – задача в математическом
Ортогональное планирование второго порядка
Построение планов второго порядка – задача в математическом
Слайд 22Ортогональное планирование второго порядка
В 1951 году Бокс и Уилсон предложили составлять
Ортогональное планирование второго порядка
В 1951 году Бокс и Уилсон предложили составлять
Слайд 23Ортогональное планирование второго порядка
Пример композиционного плана:
С учетом новых переменных xl’ получаем
Ортогональное планирование второго порядка
Пример композиционного плана:
С учетом новых переменных xl’ получаем
Слайд 24Ротатабельное планирование
Если эта дисперсия одинакова на равном удалении от центра плана,
Ротатабельное планирование
Если эта дисперсия одинакова на равном удалении от центра плана,
Слайд 25Метод случайного баланса
Часто влияние факторов на выходную координату объекта имеет затухающий экспоненциальный
Метод случайного баланса
Часто влияние факторов на выходную координату объекта имеет затухающий экспоненциальный
 Характеристика детей с ЗПР. Неблагоприятные семейные факторы влияющие на ребенка с ЗПР
Характеристика детей с ЗПР. Неблагоприятные семейные факторы влияющие на ребенка с ЗПР road monitoring 2020
road monitoring 2020 Круги на полях
Круги на полях Основные различия между руководителем по теории «Х» и по теории «Y»
Основные различия между руководителем по теории «Х» и по теории «Y» Средства и методы решения анимационных задачв сети INTERNET
Средства и методы решения анимационных задачв сети INTERNET Презентация на тему ЛАТВИЯ
Презентация на тему ЛАТВИЯ Развитие общества
Развитие общества 18.02.2008 г.
18.02.2008 г. Луг и его обитатели
Луг и его обитатели Стратегия по всем каналам: индивидуальный подход к каждому партнеру
Стратегия по всем каналам: индивидуальный подход к каждому партнеру Пути реализации инклюзивного образования средствами инновационной деятельности
Пути реализации инклюзивного образования средствами инновационной деятельности Документационное обеспечение управления и фукционирование организации
Документационное обеспечение управления и фукционирование организации Игрушки из полхов-майдана
Игрушки из полхов-майдана Ювенальная юстиция «за» и «против»
Ювенальная юстиция «за» и «против» С Днём матери
С Днём матери Графики линейных функций
Графики линейных функций Презентация на тему Влияние солнечной активности на процессы, происходящие на Земле
Презентация на тему Влияние солнечной активности на процессы, происходящие на Земле  ICN Holding
ICN Holding Феномен канона в искусстве Древнего Египта
Феномен канона в искусстве Древнего Египта Общество как сложная динамичная система
Общество как сложная динамичная система Социальные сети Презентацию разработала ученица 11 класса «А» Рязанова Анастасия.
Социальные сети Презентацию разработала ученица 11 класса «А» Рязанова Анастасия. New Jersey Employment Law Attorneys
New Jersey Employment Law Attorneys Willst du glücklich sein im Leben, trage bei zu andrer Glück, denn die Freude, die wir geben, kehrt ins eigene Herz zurück. Willst du glücklich sein im. - презентация
Willst du glücklich sein im Leben, trage bei zu andrer Glück, denn die Freude, die wir geben, kehrt ins eigene Herz zurück. Willst du glücklich sein im. - презентация Образ матери в искусстве
Образ матери в искусстве Гиподинамия
Гиподинамия  Здоровье, как его сберечь
Здоровье, как его сберечь Презентация на тему Возникновение искусства и религиозных верований
Презентация на тему Возникновение искусства и религиозных верований  Городской центр социальных и спортивных программ г. Севастополя Детско-юношеский клуб Салют
Городской центр социальных и спортивных программ г. Севастополя Детско-юношеский клуб Салют