Применение моделей нейронных структур управления мышечным сокращением в задачах управления манипулятором. А.В. Бахшиев М.В. Алек
- Применение моделей нейронных структур управления мышечным сокращением в задачах управления манипулятором. А.В. Бахшиев М.В. Алек

Содержание
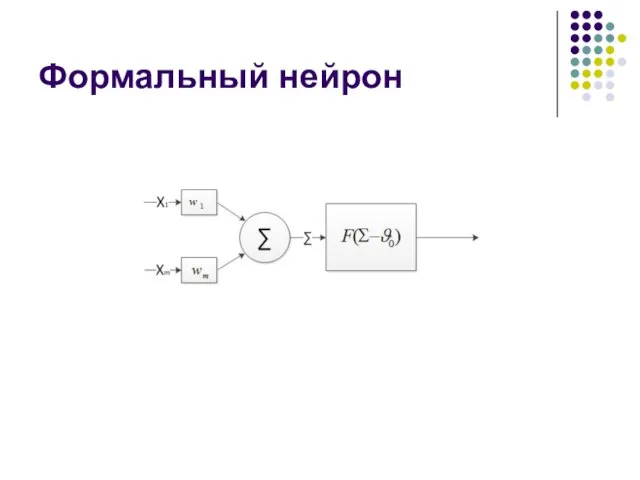
- 2. Формальный нейрон
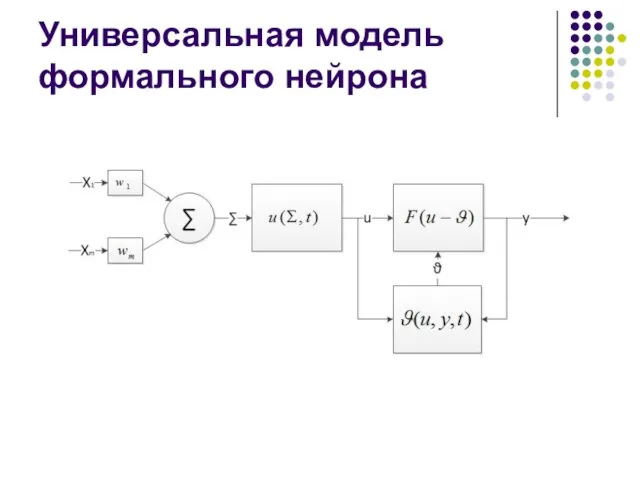
- 3. Универсальная модель формального нейрона
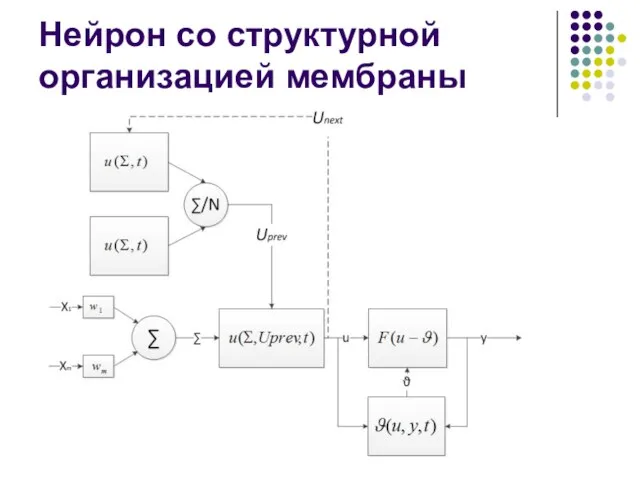
- 4. Нейрон со структурной организацией мембраны
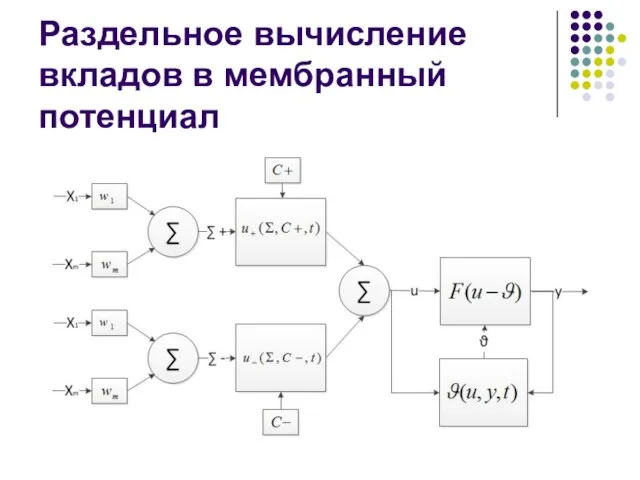
- 5. Раздельное вычисление вкладов в мембранный потенциал
- 6. Отказ от явного задания пороговой функции
- 7. С ОС “перезаряда” мембраны
- 8. Модель синапса
- 9. Функциональная схема модели нейрона
- 10. Организация структуры мембраны нейрона
- 11. Эффективность синаптической передачи Влияние синапса на мембрану во времени Зависимость эффективности от отношения сопротивлений Зависимость эффективности
- 12. Простейшие реакции модели нейрона
- 13. Частота разрядов нейрона в зависимости от размера 1 – зависимость средней частоты от числа импульсов в
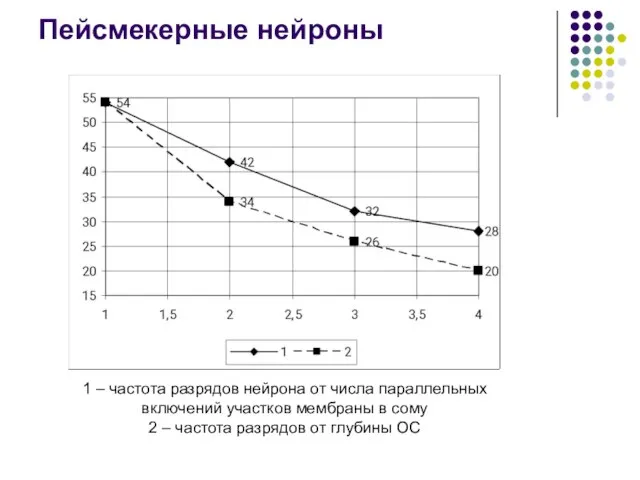
- 14. Пейсмекерные нейроны 1 – частота разрядов нейрона от числа параллельных включений участков мембраны в сому 2
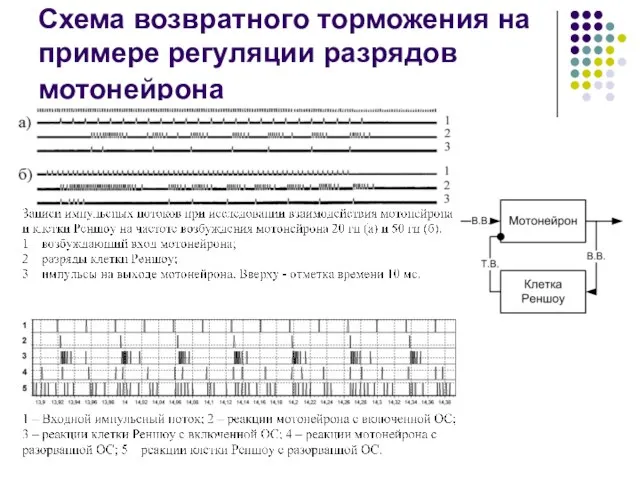
- 15. Схема возвратного торможения на примере регуляции разрядов мотонейрона
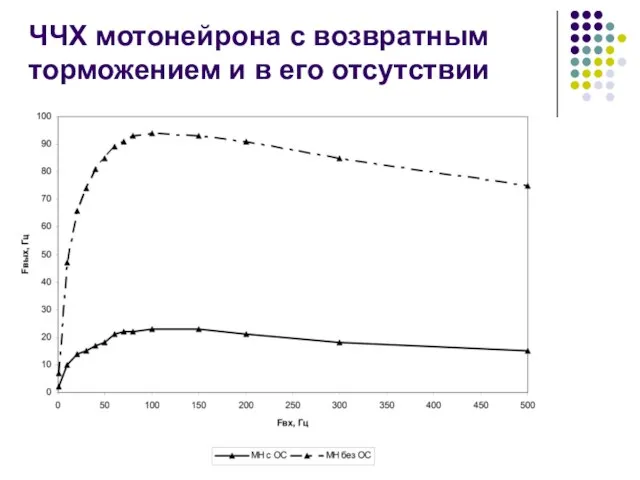
- 16. ЧЧХ мотонейрона с возвратным торможением и в его отсутствии
- 17. Схема нейронной системы управления
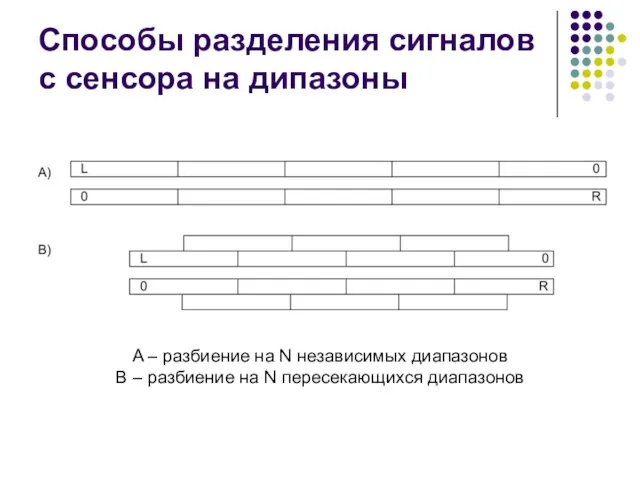
- 18. Способы разделения сигналов с сенсора на дипазоны A – разбиение на N независимых диапазонов B –
- 19. Схема управляющего элемента
- 20. Перекрестные тормозные связи
- 21. Варианты структуры исследуемых СУ Рабочий диапазон сенсоров разбивался на непересекающиеся участки, перекрестные связи отсутствовали Рабочий диапазон
- 22. Зависимость от числа упр. элементов без пер. связей http://www.youtube.com/watch?v=1ZrpbwBfQUc
- 23. Зависимость от числа упр. эл-в с перекр. связями http://www.youtube.com/watch?v=X51i0czvN2A
- 24. Управление по углу, скорости и моменту http://www.youtube.com/watch?v=fgmSFKwxpcY
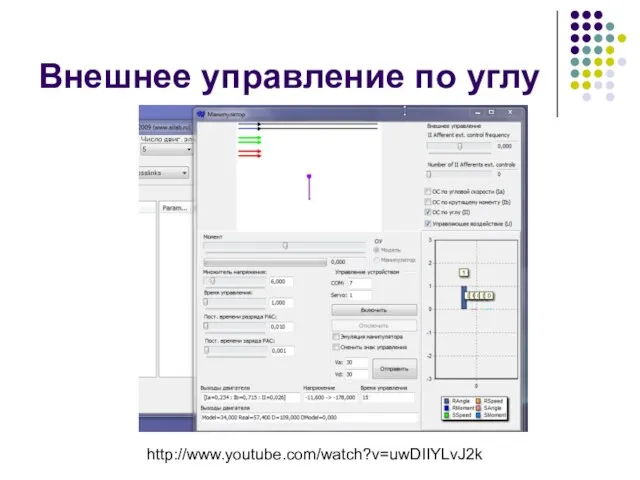
- 25. Внешнее управление по углу http://www.youtube.com/watch?v=uwDIIYLvJ2k
- 26. Управление звеном манипулятора http://www.youtube.com/watch?v=cBVxJa0Rq1k
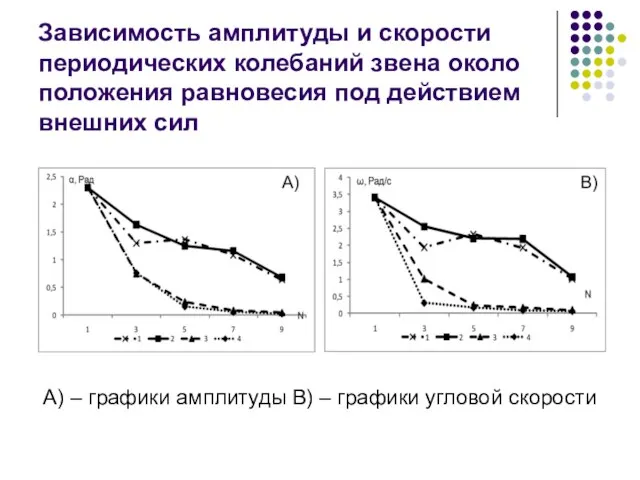
- 27. Зависимость амплитуды и скорости периодических колебаний звена около положения равновесия под действием внешних сил A) –
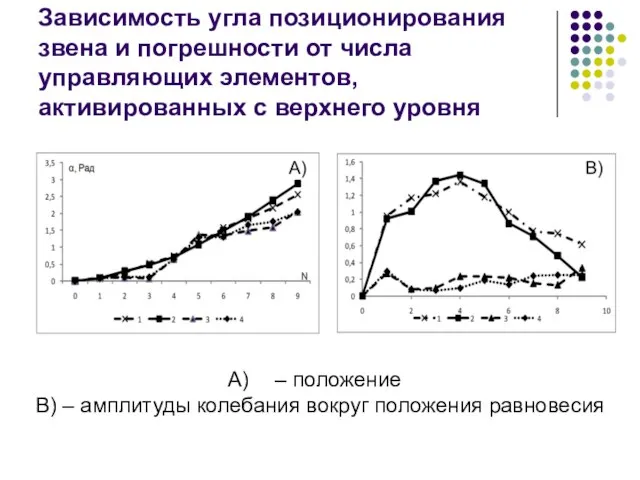
- 28. Зависимость угла позиционирования звена и погрешности от числа управляющих элементов, активированных с верхнего уровня – положение
- 29. Перспективы применения Создание прямых интерфейсов технических систем с НС живых организмов Разработка адаптивных систем управления устойчивых
- 31. Скачать презентацию
Слайд 3Универсальная модель формального нейрона
Универсальная модель формального нейрона
Слайд 4Нейрон со структурной организацией мембраны
Нейрон со структурной организацией мембраны
Слайд 5Раздельное вычисление вкладов в мембранный потенциал
Раздельное вычисление вкладов в мембранный потенциал
Слайд 6Отказ от явного задания пороговой функции
Отказ от явного задания пороговой функции

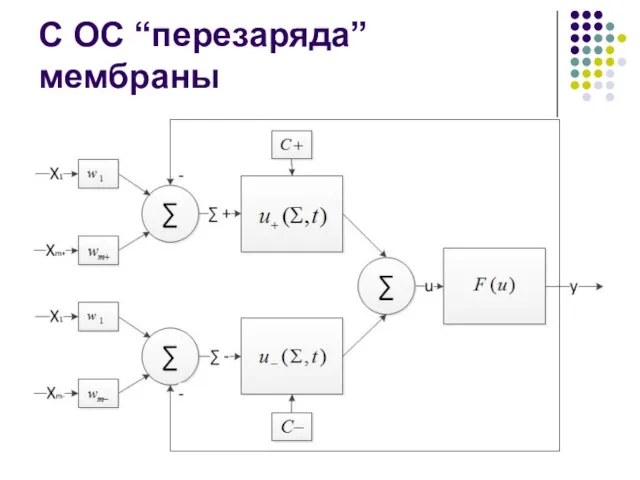
Слайд 7С ОС “перезаряда” мембраны
С ОС “перезаряда” мембраны
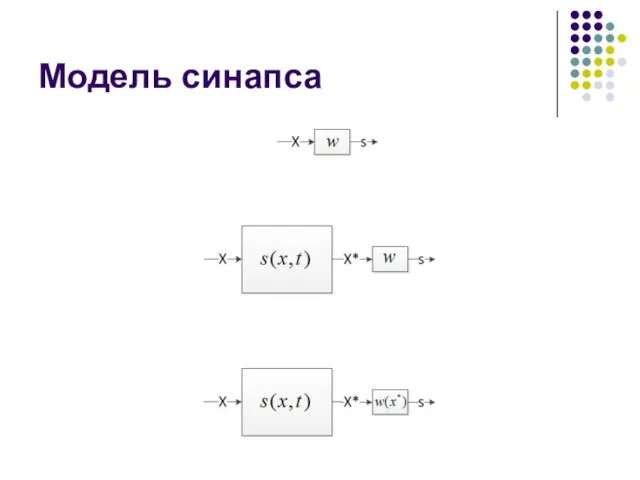
Слайд 8Модель синапса
Модель синапса
Слайд 9Функциональная схема модели нейрона
Функциональная схема модели нейрона

Слайд 10Организация структуры мембраны нейрона
Организация структуры мембраны нейрона

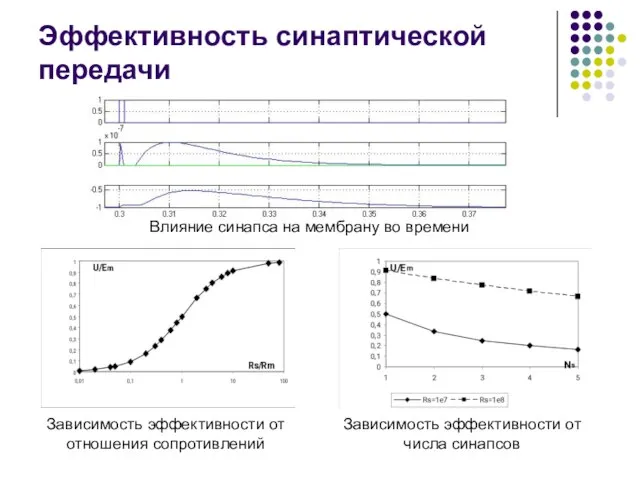
Слайд 11Эффективность синаптической передачи
Влияние синапса на мембрану во времени
Зависимость эффективности от
отношения сопротивлений
Зависимость
Эффективность синаптической передачи
Влияние синапса на мембрану во времени
Зависимость эффективности от
отношения сопротивлений
Зависимость
Слайд 12Простейшие реакции модели нейрона
Простейшие реакции модели нейрона

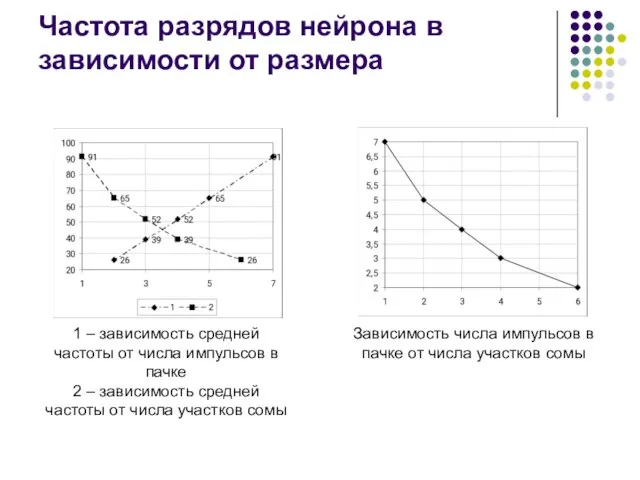
Слайд 13Частота разрядов нейрона в зависимости от размера
1 – зависимость средней частоты от
Частота разрядов нейрона в зависимости от размера
1 – зависимость средней частоты от
Слайд 14Пейсмекерные нейроны
1 – частота разрядов нейрона от числа параллельных включений участков мембраны
Пейсмекерные нейроны
1 – частота разрядов нейрона от числа параллельных включений участков мембраны
Слайд 15Схема возвратного торможения на примере регуляции разрядов мотонейрона
Схема возвратного торможения на примере регуляции разрядов мотонейрона
Слайд 16ЧЧХ мотонейрона с возвратным торможением и в его отсутствии
ЧЧХ мотонейрона с возвратным торможением и в его отсутствии
Слайд 17Схема нейронной системы управления
Схема нейронной системы управления

Слайд 18Способы разделения сигналов с сенсора на дипазоны
A – разбиение на N независимых
Способы разделения сигналов с сенсора на дипазоны
A – разбиение на N независимых
Слайд 19Схема управляющего элемента
Схема управляющего элемента

Слайд 20Перекрестные тормозные связи
Перекрестные тормозные связи

Слайд 21Варианты структуры исследуемых СУ
Рабочий диапазон сенсоров разбивался на непересекающиеся участки, перекрестные связи
Варианты структуры исследуемых СУ
Рабочий диапазон сенсоров разбивался на непересекающиеся участки, перекрестные связи
Слайд 22Зависимость от числа упр. элементов без пер. связей
http://www.youtube.com/watch?v=1ZrpbwBfQUc
Зависимость от числа упр. элементов без пер. связей
http://www.youtube.com/watch?v=1ZrpbwBfQUc
Слайд 23Зависимость от числа упр. эл-в с перекр. связями
http://www.youtube.com/watch?v=X51i0czvN2A
Зависимость от числа упр. эл-в с перекр. связями
http://www.youtube.com/watch?v=X51i0czvN2A
Слайд 24Управление по углу, скорости и моменту
http://www.youtube.com/watch?v=fgmSFKwxpcY
Управление по углу, скорости и моменту
http://www.youtube.com/watch?v=fgmSFKwxpcY
Слайд 25Внешнее управление по углу
http://www.youtube.com/watch?v=uwDIIYLvJ2k
Внешнее управление по углу
http://www.youtube.com/watch?v=uwDIIYLvJ2k
Слайд 26Управление звеном манипулятора
http://www.youtube.com/watch?v=cBVxJa0Rq1k
Управление звеном манипулятора
http://www.youtube.com/watch?v=cBVxJa0Rq1k
Слайд 27Зависимость амплитуды и скорости периодических колебаний звена около положения равновесия под действием
Зависимость амплитуды и скорости периодических колебаний звена около положения равновесия под действием
Слайд 28Зависимость угла позиционирования звена и погрешности от числа управляющих элементов, активированных с
Зависимость угла позиционирования звена и погрешности от числа управляющих элементов, активированных с
Слайд 29Перспективы применения
Создание прямых интерфейсов технических систем с НС живых организмов
Разработка адаптивных систем
Перспективы применения
Создание прямых интерфейсов технических систем с НС живых организмов
Разработка адаптивных систем
 Почуйко Н. 5-Б кл
Почуйко Н. 5-Б кл Оптические иллюзии в искусстве
Оптические иллюзии в искусстве Повышение эксплуатационной надежности трансформаторов тока производства ОАО «ЗЗВА» и разработка комплекса мероприятий по пред
Повышение эксплуатационной надежности трансформаторов тока производства ОАО «ЗЗВА» и разработка комплекса мероприятий по пред Почитаемое имя “Владимир”
Почитаемое имя “Владимир” Социальная коммерция: как меняется привычная модель маркетинга?
Социальная коммерция: как меняется привычная модель маркетинга? Требования ДОПОГ (дорожная перевозка опасных грузов) не распространяются на определённые виды перевозок
Требования ДОПОГ (дорожная перевозка опасных грузов) не распространяются на определённые виды перевозок О дистанционном доступе к профессиональным патентным БД (и о предрассудках авторского права в свете проблем цифрового копировани
О дистанционном доступе к профессиональным патентным БД (и о предрассудках авторского права в свете проблем цифрового копировани Новое в порядке расчетов и документообороте на биржевом валютном рынке ММВБ
Новое в порядке расчетов и документообороте на биржевом валютном рынке ММВБ Инновационные процессы в образовании. (Модуль 2. Политико-экономический контекст инноваций в XX- XX веках)
Инновационные процессы в образовании. (Модуль 2. Политико-экономический контекст инноваций в XX- XX веках) Вводный курс по шахматам
Вводный курс по шахматам Точное земледелие
Точное земледелие Подведение итогов конкурса. День рождения колледжа
Подведение итогов конкурса. День рождения колледжа Дом отдыха
Дом отдыха Материалы для подготовки к ежемесячному тестированию
Материалы для подготовки к ежемесячному тестированию Садово-парковое искусство Китая
Садово-парковое искусство Китая Judy, you need to find the criminal
Judy, you need to find the criminal London
London Парни выбирают спорт
Парни выбирают спорт порівняльна характеристика
порівняльна характеристика Мультикультурализм
Мультикультурализм Презентация "Использование техники граттаж на уроках изобразительного искусства в рамках регионального компонента" - скачат
Презентация "Использование техники граттаж на уроках изобразительного искусства в рамках регионального компонента" - скачат Екатерина I
Екатерина I Вот пришел желанный час: Ты зачислен в первый класс. Ты, дружок, послушай нас, Мы дадим тебе наказ: Всем о школе расскажи, Честью школ
Вот пришел желанный час: Ты зачислен в первый класс. Ты, дружок, послушай нас, Мы дадим тебе наказ: Всем о школе расскажи, Честью школ Магазин Цветы для всех. Конфетные букеты
Магазин Цветы для всех. Конфетные букеты Административно-правовые формы государственного управления. Тема 7
Административно-правовые формы государственного управления. Тема 7 Учимся создавать электронное портфолио учителя
Учимся создавать электронное портфолио учителя Презентация на тему Задачи на построение (7 класс) геометрия
Презентация на тему Задачи на построение (7 класс) геометрия Кадровое администрирование. Организационная структура управления персоналом
Кадровое администрирование. Организационная структура управления персоналом