- Принципы автоматического управления. Регуляторы. Лекция 8

Содержание
- 2. Общие сведения о структурах систем управления. ПИД-регулятор [email protected]
- 3. Общие сведения о структурах систем управления Пример: импульсный понижающий преобразователь для регулирования напряжения на термоэлементе
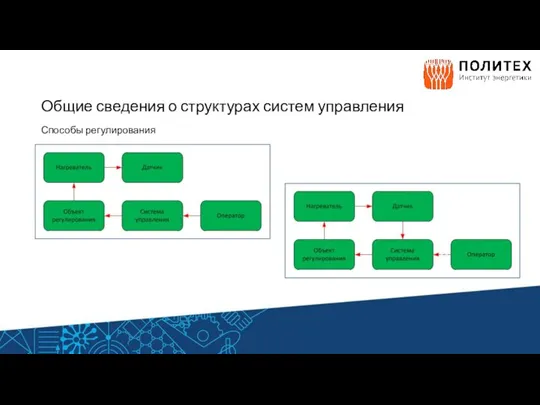
- 4. Общие сведения о структурах систем управления Способы регулирования
- 5. Общие сведения о структурах систем управления Простейшая система автоматического регулирования с обратной связью Блок R –
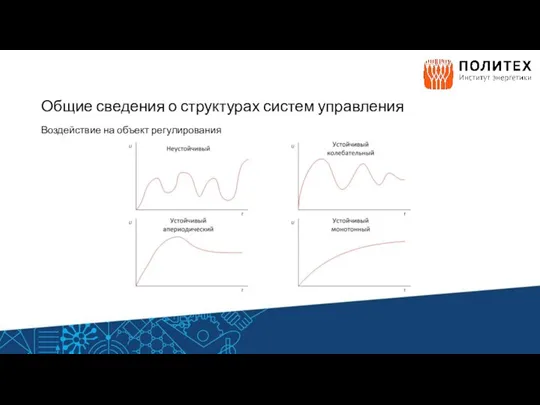
- 6. Общие сведения о структурах систем управления Воздействие на объект регулирования
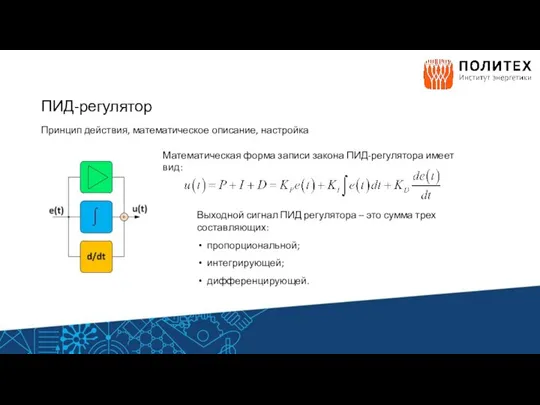
- 7. ПИД-регулятор Принцип действия, математическое описание, настройка Математическая форма записи закона ПИД-регулятора имеет вид: Выходной сигнал ПИД
- 8. ПИД-регулятор Пропорциональная составляющая Недостатки пропорциональных регуляторов: наличие статической ошибки регулирования; невысокая устойчивость при увеличении коэффициента. Достоинство
- 9. ПИД-регулятор Интегрирующая составляющая С учетом временной дискретности регулятора можно записать следующим образом: Недостатки: низкое быстродействие; посредственная
- 10. ПИД-регулятор Дифференцирующая составляющая С учетом временной дискретности регулятора можно записать следующим образом: Регуляторов, состоящих из единственного
- 12. Скачать презентацию
Слайд 3Общие сведения о структурах систем управления
Пример: импульсный понижающий преобразователь для регулирования
Общие сведения о структурах систем управления
Пример: импульсный понижающий преобразователь для регулирования

Слайд 4Общие сведения о структурах систем управления
Способы регулирования
Общие сведения о структурах систем управления
Способы регулирования
Слайд 5Общие сведения о структурах систем управления
Простейшая система автоматического регулирования с обратной
Общие сведения о структурах систем управления
Простейшая система автоматического регулирования с обратной

Слайд 6Общие сведения о структурах систем управления
Воздействие на объект регулирования
Общие сведения о структурах систем управления
Воздействие на объект регулирования
Слайд 7ПИД-регулятор
Принцип действия, математическое описание, настройка
Математическая форма записи закона ПИД-регулятора имеет вид:
Выходной сигнал
ПИД-регулятор
Принцип действия, математическое описание, настройка
Математическая форма записи закона ПИД-регулятора имеет вид:
Выходной сигнал
Слайд 8ПИД-регулятор
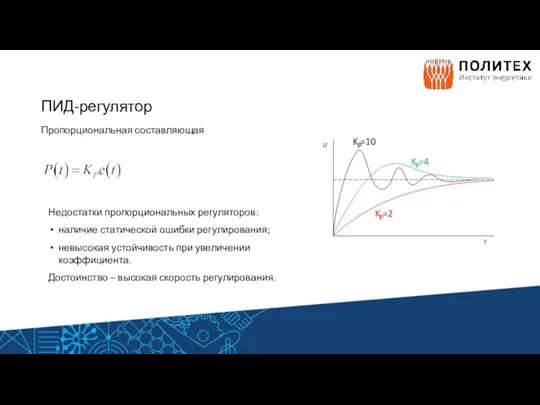
Пропорциональная составляющая
Недостатки пропорциональных регуляторов:
наличие статической ошибки регулирования;
невысокая устойчивость при увеличении коэффициента.
Достоинство –
ПИД-регулятор
Пропорциональная составляющая
Недостатки пропорциональных регуляторов:
наличие статической ошибки регулирования;
невысокая устойчивость при увеличении коэффициента.
Достоинство –
Слайд 9ПИД-регулятор
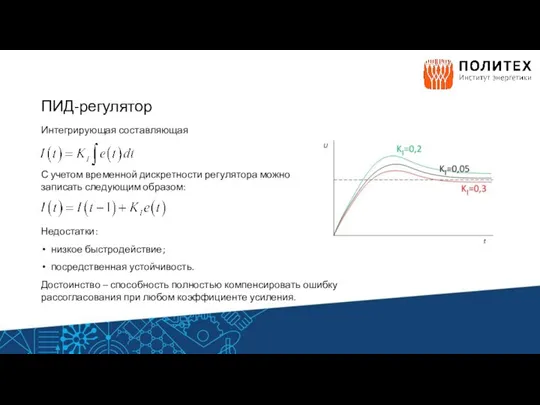
Интегрирующая составляющая
С учетом временной дискретности регулятора можно записать следующим образом:
Недостатки:
низкое быстродействие;
посредственная устойчивость.
Достоинство
ПИД-регулятор
Интегрирующая составляющая
С учетом временной дискретности регулятора можно записать следующим образом:
Недостатки:
низкое быстродействие;
посредственная устойчивость.
Достоинство
Слайд 10ПИД-регулятор
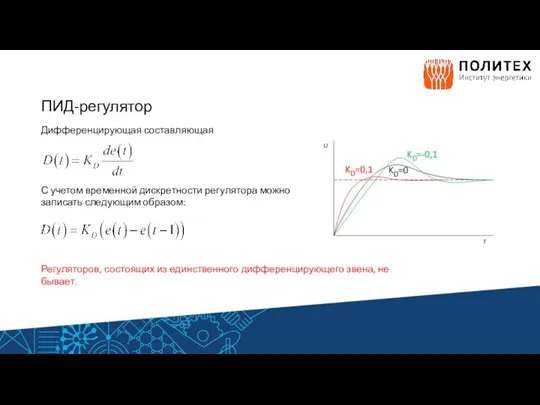
Дифференцирующая составляющая
С учетом временной дискретности регулятора можно записать следующим образом:
Регуляторов, состоящих из
ПИД-регулятор
Дифференцирующая составляющая
С учетом временной дискретности регулятора можно записать следующим образом:
Регуляторов, состоящих из
 Презентация на тему Правомерное поведение, правонарушение, юридическая ответственность
Презентация на тему Правомерное поведение, правонарушение, юридическая ответственность  Комбикорневый завод Здоровая ферма
Комбикорневый завод Здоровая ферма Грумерная мечта. Dream.Groom
Грумерная мечта. Dream.Groom Каждый школьник должен знать, как проекты составлять !
Каждый школьник должен знать, как проекты составлять ! Осознав, что в математике нет ничего более скучного и утомительного, чем умножение, деление, извлечение квадратных и кубических ко
Осознав, что в математике нет ничего более скучного и утомительного, чем умножение, деление, извлечение квадратных и кубических ко Анна Андреевна Ахматова(1889-1966)
Анна Андреевна Ахматова(1889-1966) Статья 178 Уголовного кодекса РФ гласит
Статья 178 Уголовного кодекса РФ гласит Моё хобби кулинария
Моё хобби кулинария Основная образовательная программа (ООП)Менеджмент в кино и телевидениипрофиль – «Менеджмент организации»направление – «Мене
Основная образовательная программа (ООП)Менеджмент в кино и телевидениипрофиль – «Менеджмент организации»направление – «Мене Презентация на тему Музыка в моей жизни
Презентация на тему Музыка в моей жизни Лекарства дома
Лекарства дома ОСНОВЫ ЛОГИСТИКИ курс лекций
ОСНОВЫ ЛОГИСТИКИ курс лекций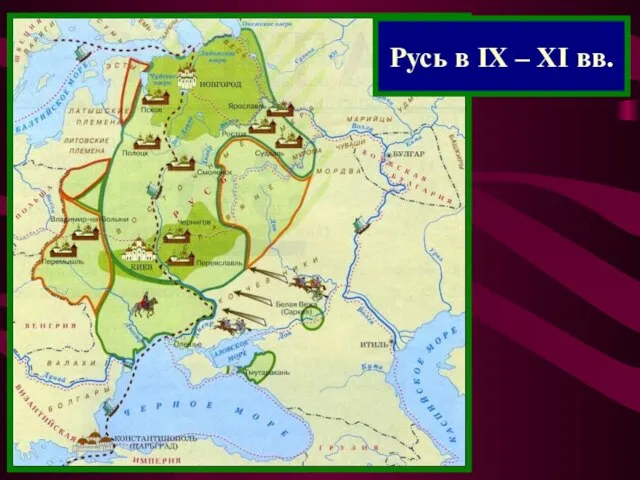 Русь в IX – XI вв
Русь в IX – XI вв Ангел Хранитель и святой, чьё имя мы носим
Ангел Хранитель и святой, чьё имя мы носим 1
1 Маркетинговая среда организации
Маркетинговая среда организации Лекция 3
Лекция 3 Ледоходы. Приспособление для ходьбы в гололёд, антискользители
Ледоходы. Приспособление для ходьбы в гололёд, антискользители Возведение завода по вторичной переработке пластиковых изделий на территории муниципального образования г. Новороссийска
Возведение завода по вторичной переработке пластиковых изделий на территории муниципального образования г. Новороссийска Тренинг Холодные звонки. HARD
Тренинг Холодные звонки. HARD Презентация на тему Логарифмы. Применение логарифмов
Презентация на тему Логарифмы. Применение логарифмов Презентация на тему Графики тригонометрических функций
Презентация на тему Графики тригонометрических функций Проблемы адаптации учебных мигрантов из Азии в российских университетах
Проблемы адаптации учебных мигрантов из Азии в российских университетах Мифы Древней Греции
Мифы Древней Греции Международный Университет природы, общества и человека
Международный Университет природы, общества и человека ВСЕ РАБОТЫ ХОРОШИ
ВСЕ РАБОТЫ ХОРОШИ Презентация на тему Личностный подход к лидерству
Презентация на тему Личностный подход к лидерству  шаблон презентации
шаблон презентации