- «Программно-аппаратный комплекс для исследования автоматного управления мобильными роботами»

Содержание
- 2. Постановка задачи Комплекс для исследования автоматного управления мобильными роботами: Графический язык разработки автоматных программ; Мобильный робот;
- 3. Визуальное средство разработки Функциональность: Встроенный редактор автоматных программ. Отладка автоматной программы по шагам. Режим “непрерывной” работы.
- 4. Элементы графического интерфейса Панель редактирования. Входные воздействия. Монитор переменных. Выходные воздействия. Кнопки управления.
- 5. Мобильный робот Проектирование робота. Состав робота: вычислительная платформа на основе микроконтроллера Atmel AVR. Аккумулятор. Два двигателя
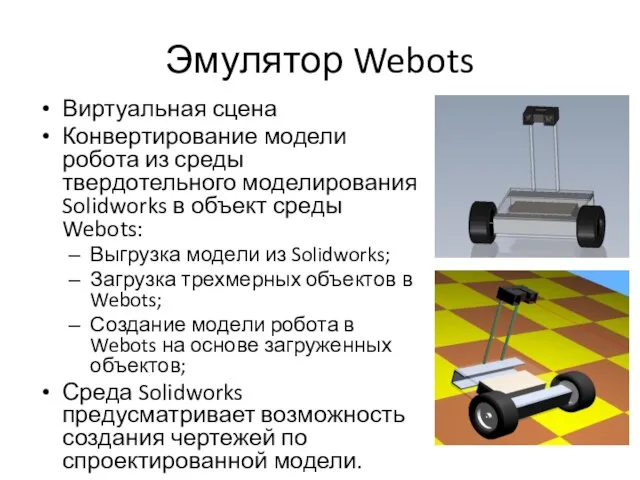
- 6. Эмулятор Webots Виртуальная сцена Конвертирование модели робота из среды твердотельного моделирования Solidworks в объект среды Webots:
- 7. Генетическое программирование Задача кегельринг. Применение среды Webots: Сцена, датчики; Супервизор; Результаты работы алгоритма. Проблемы, связанные с
- 9. Скачать презентацию
Слайд 2Постановка задачи
Комплекс для исследования автоматного управления мобильными роботами:
Графический язык разработки автоматных программ;
Мобильный
Постановка задачи
Комплекс для исследования автоматного управления мобильными роботами:
Графический язык разработки автоматных программ;
Мобильный
Слайд 3Визуальное средство разработки
Функциональность:
Встроенный редактор автоматных программ.
Отладка автоматной программы по шагам.
Режим “непрерывной” работы.
Выгрузка
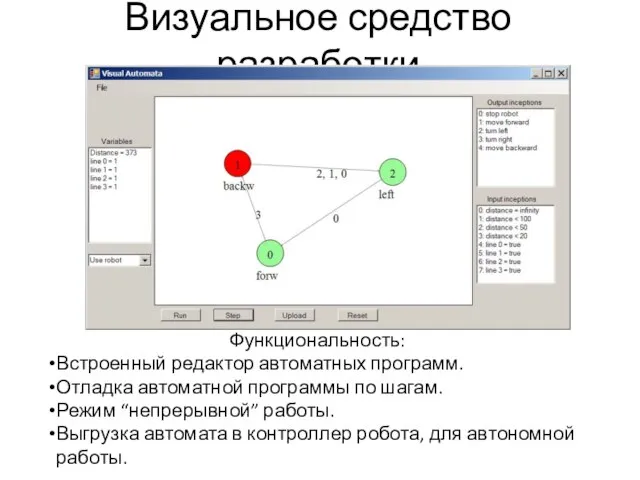
Визуальное средство разработки
Функциональность:
Встроенный редактор автоматных программ.
Отладка автоматной программы по шагам.
Режим “непрерывной” работы.
Выгрузка
Слайд 4Элементы графического интерфейса
Панель редактирования.
Входные воздействия.
Монитор переменных.
Выходные воздействия.
Кнопки управления.
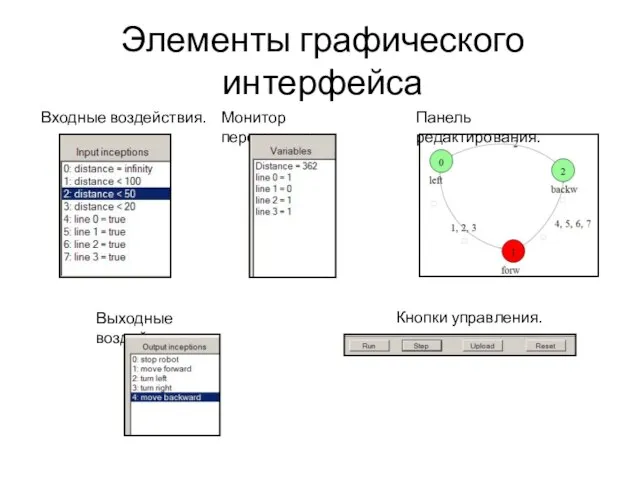
Элементы графического интерфейса
Панель редактирования.
Входные воздействия.
Монитор переменных.
Выходные воздействия.
Кнопки управления.
Слайд 5Мобильный робот
Проектирование робота.
Состав робота:
вычислительная платформа на основе микроконтроллера Atmel AVR.
Аккумулятор.
Два двигателя с
Мобильный робот
Проектирование робота.
Состав робота:
вычислительная платформа на основе микроконтроллера Atmel AVR.
Аккумулятор.
Два двигателя с
Слайд 6Эмулятор Webots
Виртуальная сцена
Конвертирование модели робота из среды твердотельного моделирования Solidworks в объект
Эмулятор Webots
Виртуальная сцена
Конвертирование модели робота из среды твердотельного моделирования Solidworks в объект
Слайд 7Генетическое программирование
Задача кегельринг.
Применение среды Webots:
Сцена, датчики;
Супервизор;
Результаты работы алгоритма.
Проблемы, связанные с портированием автоматных
Генетическое программирование
Задача кегельринг.
Применение среды Webots:
Сцена, датчики;
Супервизор;
Результаты работы алгоритма.
Проблемы, связанные с портированием автоматных
 Безопасность в мобильных сетях 3го поколения:угрозы, возникающие при передаче данных через IP
Безопасность в мобильных сетях 3го поколения:угрозы, возникающие при передаче данных через IP Алкалоиды
Алкалоиды  История
История Истолкование стихотворения А.Фета
Истолкование стихотворения А.Фета Разработка алгоритма формирования и интерпретирования данных об изделиях радиоэлектронной аппаратуры, передаваемых заказчику,
Разработка алгоритма формирования и интерпретирования данных об изделиях радиоэлектронной аппаратуры, передаваемых заказчику, MAPLE
MAPLE Некоторые аспекты библиометрического анализа научной активности ученых России, Беларуси и Украины
Некоторые аспекты библиометрического анализа научной активности ученых России, Беларуси и Украины Россия на рубеже 19 - начала 20 века
Россия на рубеже 19 - начала 20 века Этнокультурный компонент в технологическом образовании как средство познания мира
Этнокультурный компонент в технологическом образовании как средство познания мира Лес - наше богатство
Лес - наше богатство Электронная почта
Электронная почта Проект филателистической образовательной площадки «Герценовский филателист»
Проект филателистической образовательной площадки «Герценовский филателист» Гастрономические фестивали как региональные бренды
Гастрономические фестивали как региональные бренды О ходе реализации на территории субъектов Российской Федерации ВФСК Готов к труду и обороне
О ходе реализации на территории субъектов Российской Федерации ВФСК Готов к труду и обороне Школа «Леонардо»
Школа «Леонардо» Кафедра факультетской педиатрии предоставляет к участию в конкурсе инновационную образовательную программу «Проблемность обуче
Кафедра факультетской педиатрии предоставляет к участию в конкурсе инновационную образовательную программу «Проблемность обуче Картина Н.П. Богданова-Бельского «Устный счет» С.А.Рачинский – замечательный педагог Картина «Устный счет» русского художника Ник
Картина Н.П. Богданова-Бельского «Устный счет» С.А.Рачинский – замечательный педагог Картина «Устный счет» русского художника Ник Поляризация света
Поляризация света Тундра и лесотундра
Тундра и лесотундра Биосферный заповедник «Брянский лес»
Биосферный заповедник «Брянский лес» Выставка работ «Дары осени»
Выставка работ «Дары осени» Проект: Кулинары
Проект: Кулинары ФУТУРОЛОГИЯ Лекция 1. Начала футурологии и основные тенденции XXI века Автор Валерия Прайд Член Координационного Совета Российско
ФУТУРОЛОГИЯ Лекция 1. Начала футурологии и основные тенденции XXI века Автор Валерия Прайд Член Координационного Совета Российско Последовательное и параллельное соединения проводников
Последовательное и параллельное соединения проводников Познавательные универсальные учебные действия как результат образования
Познавательные универсальные учебные действия как результат образования Тематическая картина в русском искусстве XIX века
Тематическая картина в русском искусстве XIX века Системный анализ
Системный анализ «Русский народный женский костюм»
«Русский народный женский костюм»