- Радионавигационные системы и комплексы. Лекция 5

Содержание
- 2. guap.ru РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ И КОМПЛЕКСЫ ЛЕКЦИЯ 5 Санкт-Петербург 2022
- 3. ЛЕКЦИЯ 5 Тема : Дальность действия многопозиционных РНС (МРНС) 0. Повторение пройденного материала: Точность позиционирования в
- 4. 1. Баженов, А.В. РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ/ Учебное пособие. [Текст]/ А.В. Баженов, Г.И. Захаренко, А.Н. Бережнов, К.Ю. Савченко./
- 5. 0. Повторение пройденного Билет 11 Показать ЛП дальномерного-дальномерного метода, оценить точность их определения по соотношению сигнал/шум
- 6. ГЕОМЕТРИЧЕСКИЙ ФАКТОР Погрешность определения местоположения зависит не только от точности нахождения элемента W, но и от
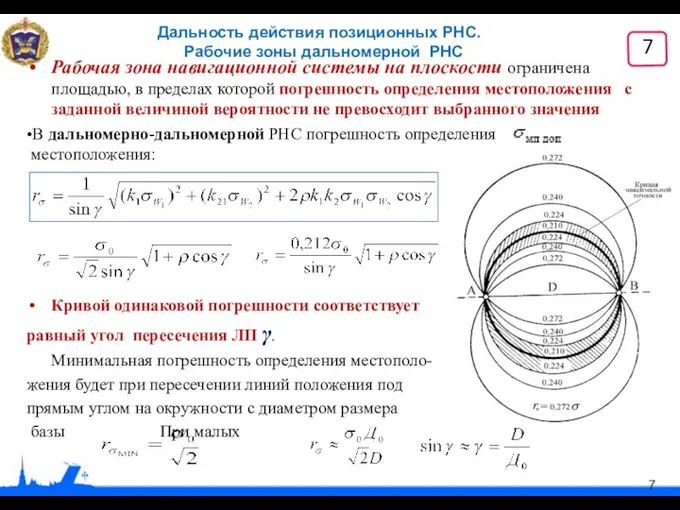
- 7. Дальность действия позиционных РНС. Рабочие зоны дальномерной РНС Рабочая зона навигационной системы на плоскости ограничена площадью,
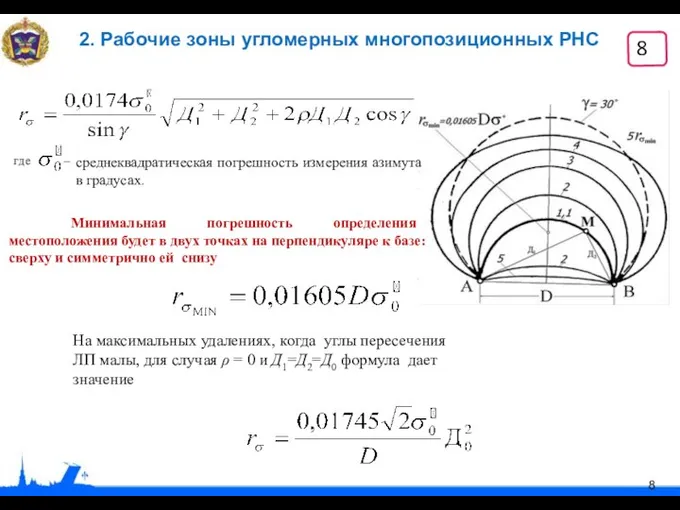
- 8. 2. Рабочие зоны угломерных многопозиционных РНС Минимальная погрешность определения местоположения будет в двух точках на перпендикуляре
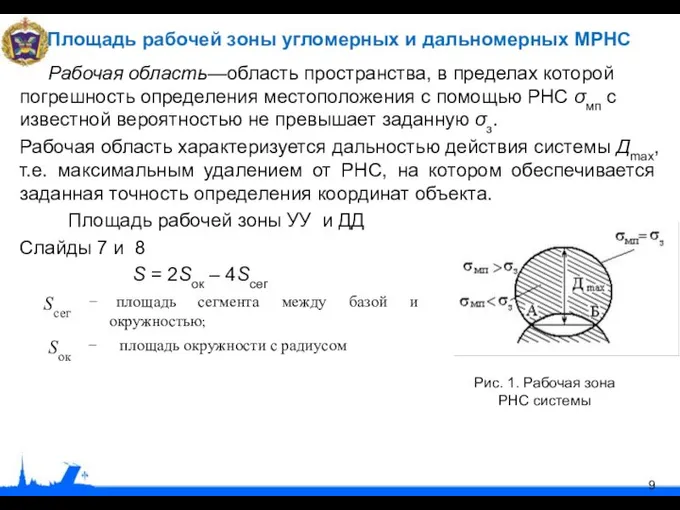
- 9. Площадь рабочей зоны угломерных и дальномерных МРНС Рабочая область—область пространства, в пределах которой погрешность определения местоположения
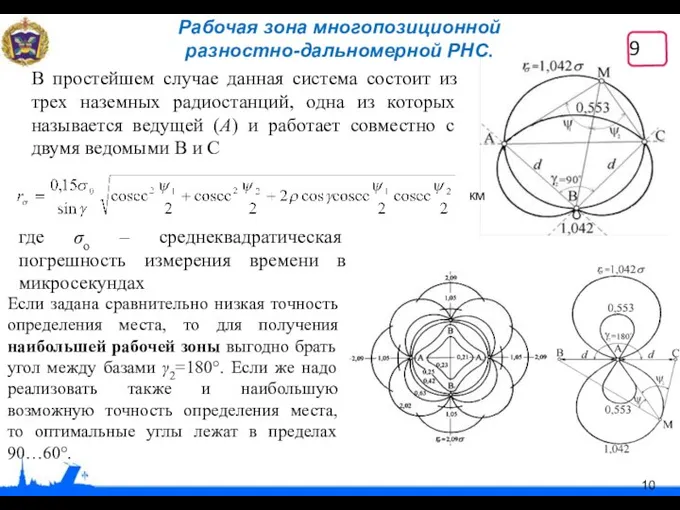
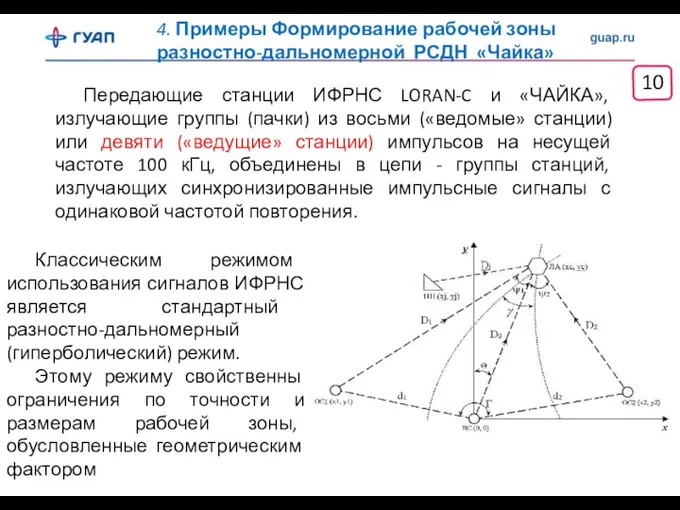
- 10. Рабочая зона многопозиционной разностно-дальномерной РНС. В простейшем случае данная система состоит из трех наземных радиостанций, одна
- 11. 10 Передающие станции ИФРНС LORAN-C и «ЧАЙКА», излучающие группы (пачки) из восьми («ведомые» станции) или девяти
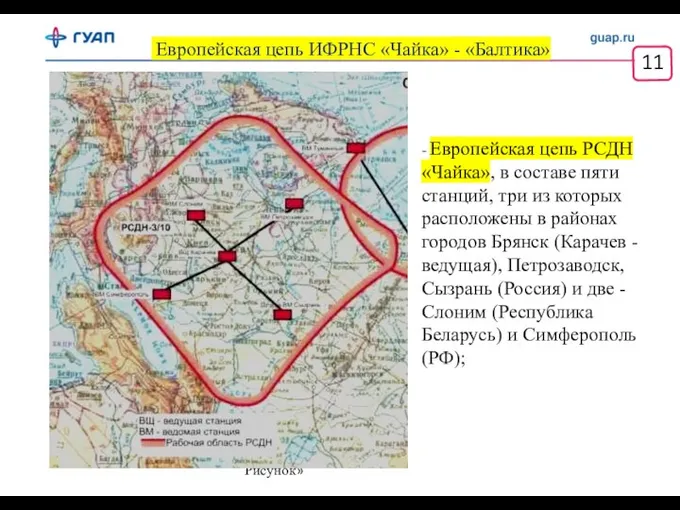
- 12. 11 Рисунок» - Европейская цепь РСДН «Чайка», в составе пяти станций, три из которых расположены в
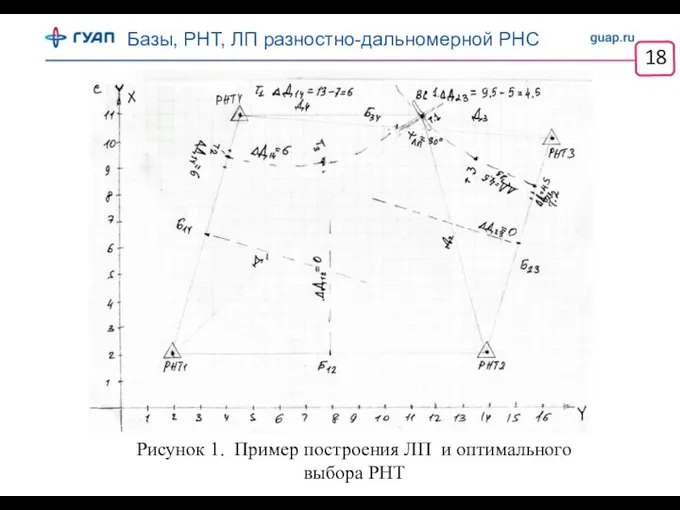
- 13. Базы, РНТ, ЛП разностно-дальномерной РНС Рисунок 1. Пример построения ЛП и оптимального выбора РНТ 18
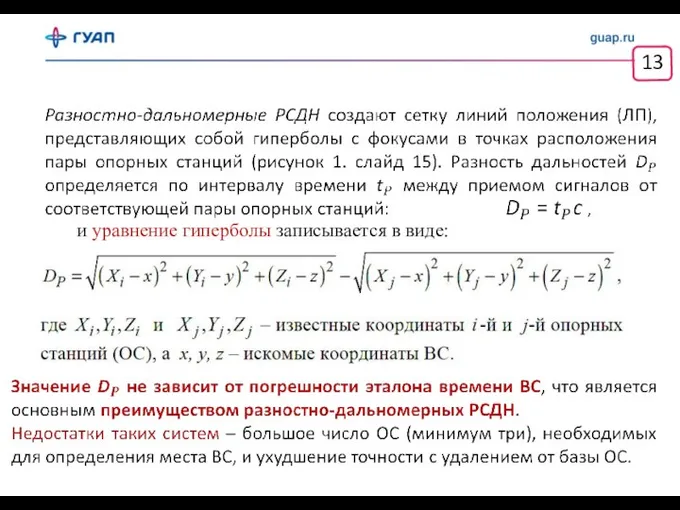
- 14. и уравнение гиперболы записывается в виде: 13
- 15. Задание 19 1. Термины и определения. 1. Баженов, А.В. РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ/Учебное пособие. [Текст]/ А.В. Баженов, Г.И.
- 17. Скачать презентацию
Слайд 3ЛЕКЦИЯ 5
Тема : Дальность действия многопозиционных РНС (МРНС)
0. Повторение пройденного материала: Точность
ЛЕКЦИЯ 5
Тема : Дальность действия многопозиционных РНС (МРНС)
0. Повторение пройденного материала: Точность
Слайд 41. Баженов, А.В. РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ/
Учебное пособие. [Текст]/ А.В. Баженов, Г.И. Захаренко, А.Н.
1. Баженов, А.В. РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ/
Учебное пособие. [Текст]/ А.В. Баженов, Г.И. Захаренко, А.Н.
![1. Баженов, А.В. РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ/ Учебное пособие. [Текст]/ А.В. Баженов, Г.И. Захаренко,](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1073255/slide-3.jpg)
Слайд 50. Повторение пройденного
Билет 11
Показать ЛП дальномерного-дальномерного метода, оценить точность их определения по
0. Повторение пройденного
Билет 11
Показать ЛП дальномерного-дальномерного метода, оценить точность их определения по
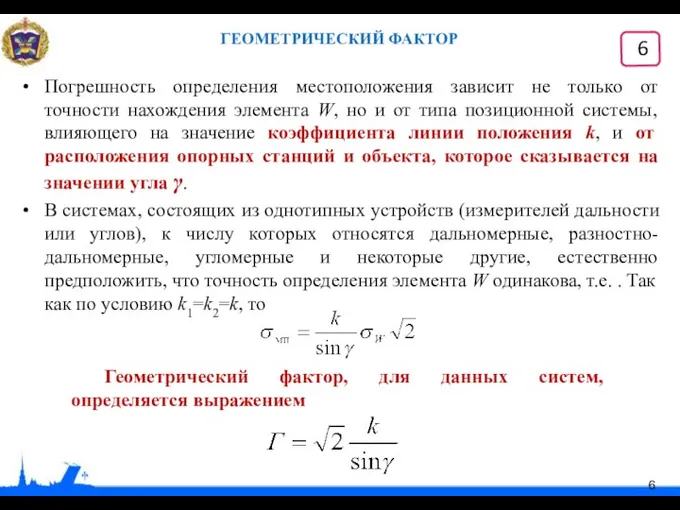
Слайд 6ГЕОМЕТРИЧЕСКИЙ ФАКТОР
Погрешность определения местоположения зависит не только от точности нахождения элемента W,
ГЕОМЕТРИЧЕСКИЙ ФАКТОР
Погрешность определения местоположения зависит не только от точности нахождения элемента W,
Слайд 7Дальность действия позиционных РНС.
Рабочие зоны дальномерной РНС
Рабочая зона навигационной системы на
Дальность действия позиционных РНС.
Рабочие зоны дальномерной РНС
Рабочая зона навигационной системы на
Слайд 82. Рабочие зоны угломерных многопозиционных РНС
Минимальная погрешность определения местоположения будет в
2. Рабочие зоны угломерных многопозиционных РНС
Минимальная погрешность определения местоположения будет в
Слайд 9Площадь рабочей зоны угломерных и дальномерных МРНС
Рабочая область—область пространства, в пределах которой
Площадь рабочей зоны угломерных и дальномерных МРНС
Рабочая область—область пространства, в пределах которой
Слайд 10Рабочая зона многопозиционной
разностно-дальномерной РНС.
В простейшем случае данная система состоит из трех
Рабочая зона многопозиционной
разностно-дальномерной РНС.
В простейшем случае данная система состоит из трех
Слайд 1110
Передающие станции ИФРНС LORAN-C и «ЧАЙКА», излучающие группы (пачки) из восьми («ведомые»
10
Передающие станции ИФРНС LORAN-C и «ЧАЙКА», излучающие группы (пачки) из восьми («ведомые»
Слайд 1211
Рисунок»
- Европейская цепь РСДН «Чайка», в составе пяти станций, три из которых
11
Рисунок»
- Европейская цепь РСДН «Чайка», в составе пяти станций, три из которых
Слайд 13Базы, РНТ, ЛП разностно-дальномерной РНС
Рисунок 1. Пример построения ЛП и оптимального выбора
Базы, РНТ, ЛП разностно-дальномерной РНС
Рисунок 1. Пример построения ЛП и оптимального выбора
Слайд 14
и уравнение гиперболы записывается в виде:
13
и уравнение гиперболы записывается в виде:
13
Слайд 15Задание
19
1. Термины и определения.
1. Баженов, А.В. РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ/Учебное пособие.
Задание
19
1. Термины и определения.
1. Баженов, А.В. РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ/Учебное пособие.
 Научно-исследовательский проект
Научно-исследовательский проект Учреждения социального обслуживания населения, их виды и специфика деятельности
Учреждения социального обслуживания населения, их виды и специфика деятельности эконом-класс
эконом-класс Анализ целевых показателей ФЦП за 2009 год(научно-образовательные центры)
Анализ целевых показателей ФЦП за 2009 год(научно-образовательные центры) Полна чудес могучая природа. Весенняя сказка «Снегурочка»
Полна чудес могучая природа. Весенняя сказка «Снегурочка»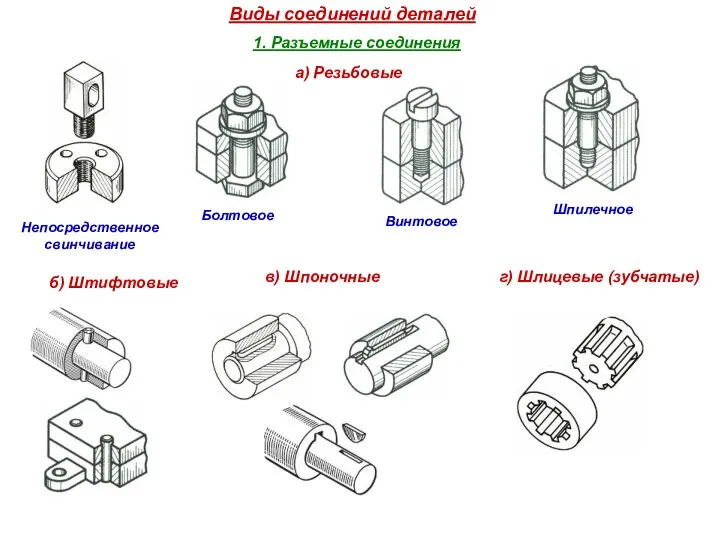 Виды соединений деталей
Виды соединений деталей Первые общерусские князья
Первые общерусские князья Презентация на тему: Проблемы подросткового возраста и его особенности
Презентация на тему: Проблемы подросткового возраста и его особенности Сказка про осень
Сказка про осень Открытый классный час на тему:
Открытый классный час на тему: Сытнее овоща нет в мире
Сытнее овоща нет в мире Презентация на тему Герои древней Руси
Презентация на тему Герои древней Руси  Способы борьбы со стрессом
Способы борьбы со стрессом Презентация на тему Обитатели морей и океанов
Презентация на тему Обитатели морей и океанов  Динамично развивающаяся компания по продаже автозапчастей А-Detal.ru
Динамично развивающаяся компания по продаже автозапчастей А-Detal.ru "Темперамент"
"Темперамент" Кишечные инфекции
Кишечные инфекции styles
styles Материалы для рисования. Вопросы
Материалы для рисования. Вопросы Класс элементарных функций и их графики
Класс элементарных функций и их графики Презентация на тему Разделительные Ъ и Ь знаки
Презентация на тему Разделительные Ъ и Ь знаки Технология выпуска новостей
Технология выпуска новостей Жиронепроницаемая бумага. Пергамент
Жиронепроницаемая бумага. Пергамент 1п екон
1п екон We like the place we live
We like the place we live Как успешно разрешать конфликты?
Как успешно разрешать конфликты? Правильная осанка - залог здоровья
Правильная осанка - залог здоровья Государство в политической системе (11 класс)
Государство в политической системе (11 класс)