- Регулирования координат в разомкнутых системах

Содержание
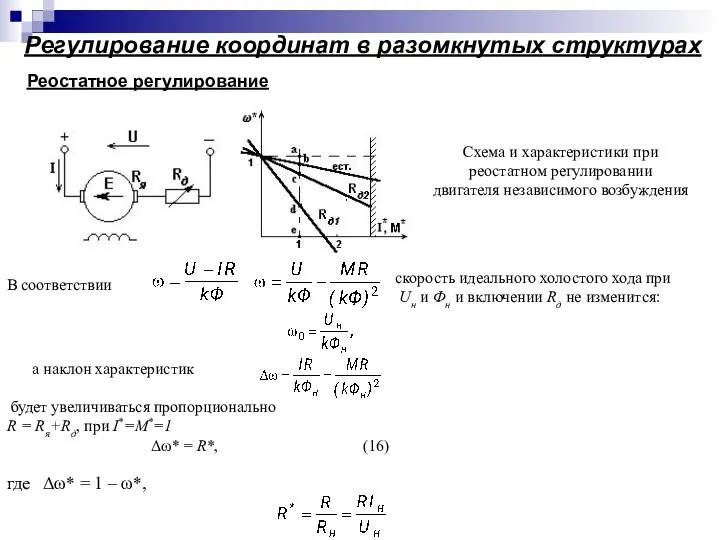
- 2. Регулирование координат в разомкнутых структурах Реостатное регулирование Схема и характеристики при реостатном регулировании двигателя независимого возбуждения
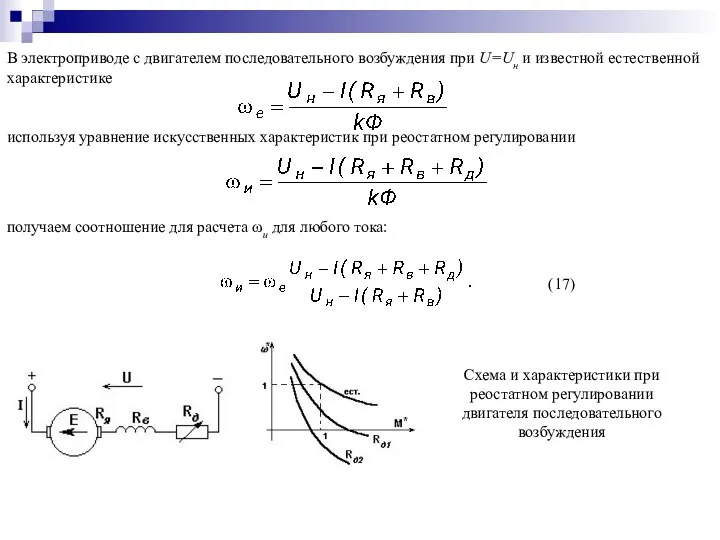
- 3. В электроприводе с двигателем последовательного возбуждения при U=Uн и известной естественной характеристике используя уравнение искусственных характеристик
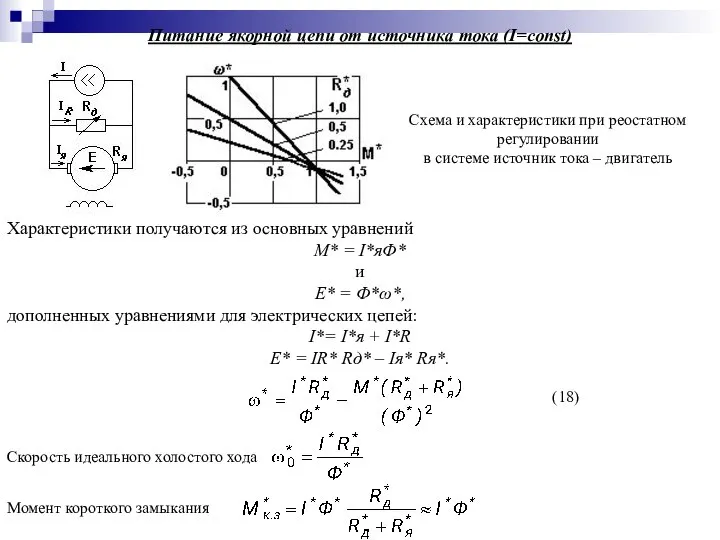
- 4. Питание якорной цепи от источника тока (I=const) Схема и характеристики при реостатном регулировании в системе источник
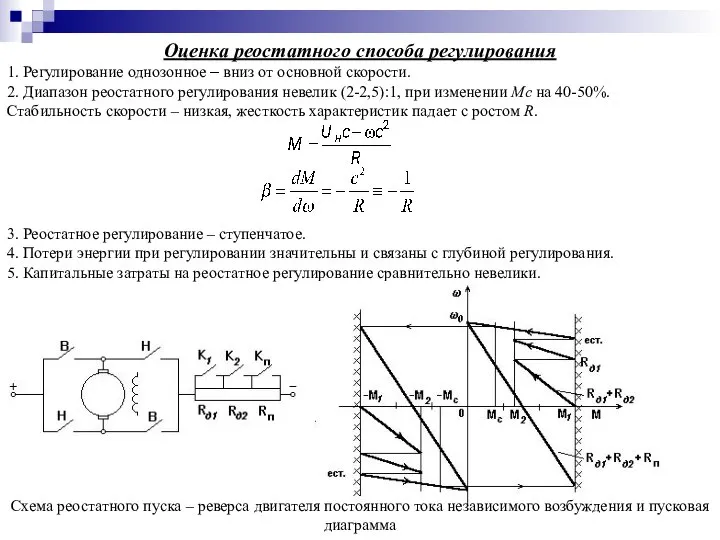
- 5. Оценка реостатного способа регулирования 1. Регулирование однозонное – вниз от основной скорости. 2. Диапазон реостатного регулирования
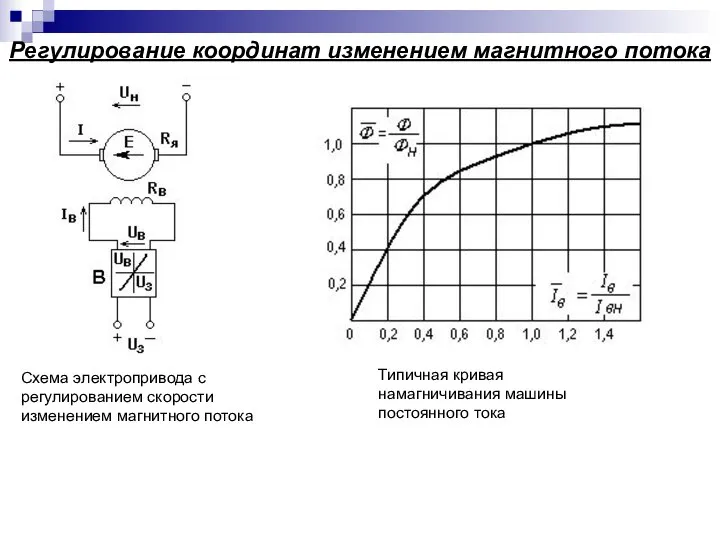
- 6. Регулирование координат изменением магнитного потока Схема электропривода с регулированием скорости изменением магнитного потока Типичная кривая намагничивания
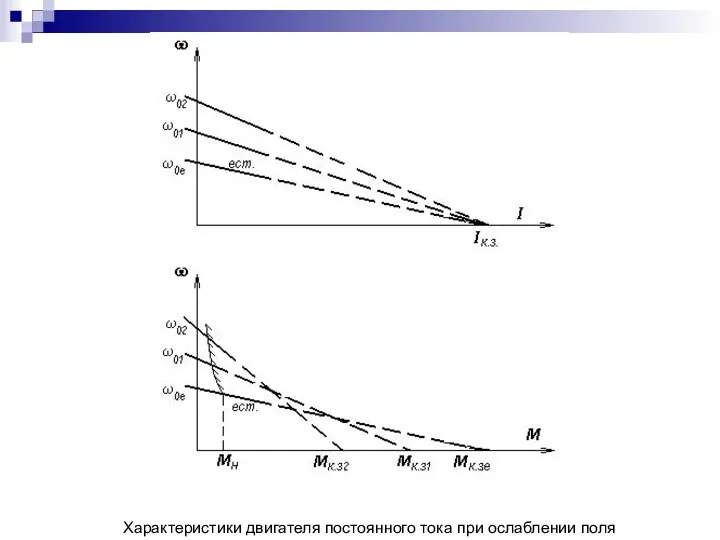
- 7. Характеристики двигателя постоянного тока при ослаблении поля
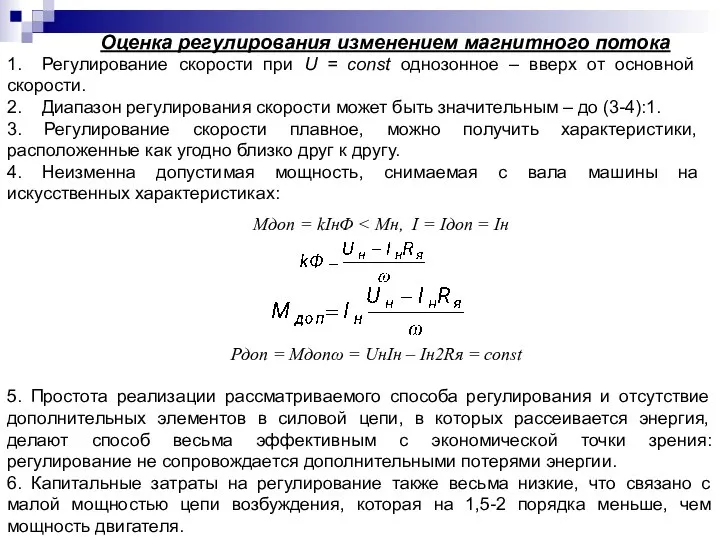
- 8. Оценка регулирования изменением магнитного потока 1. Регулирование скорости при U = const однозонное – вверх от
- 9. Регулирование скорости изменением напряжения на якоре Схема и характеристики при регулировании скорости двигателя постоянного тока изменением
- 11. Скачать презентацию
Слайд 2Регулирование координат в разомкнутых структурах
Реостатное регулирование
Схема и характеристики при реостатном
Регулирование координат в разомкнутых структурах
Реостатное регулирование
Схема и характеристики при реостатном
Слайд 3В электроприводе с двигателем последовательного возбуждения при U=Uн и известной естественной характеристике
используя
В электроприводе с двигателем последовательного возбуждения при U=Uн и известной естественной характеристике
используя
Слайд 4Питание якорной цепи от источника тока (I=const)
Схема и характеристики при реостатном регулировании
в
Питание якорной цепи от источника тока (I=const)
Схема и характеристики при реостатном регулировании
в
Слайд 5Оценка реостатного способа регулирования
1. Регулирование однозонное – вниз от основной скорости.
2. Диапазон
Оценка реостатного способа регулирования
1. Регулирование однозонное – вниз от основной скорости.
2. Диапазон
Слайд 6Регулирование координат изменением магнитного потока
Схема электропривода с регулированием скорости изменением магнитного
Регулирование координат изменением магнитного потока
Схема электропривода с регулированием скорости изменением магнитного
Слайд 7Характеристики двигателя постоянного тока при ослаблении поля
Характеристики двигателя постоянного тока при ослаблении поля
Слайд 8Оценка регулирования изменением магнитного потока
1. Регулирование скорости при U = const
Оценка регулирования изменением магнитного потока
1. Регулирование скорости при U = const
Слайд 9Регулирование скорости изменением напряжения на якоре
Схема и характеристики при регулировании скорости двигателя
постоянного
Регулирование скорости изменением напряжения на якоре
Схема и характеристики при регулировании скорости двигателя
постоянного

 Изделия для ландшафтного дизайна
Изделия для ландшафтного дизайна Презентация на тему С Днём матери
Презентация на тему С Днём матери Предложите детям хлопать в ладоши (топать ногой, ударять по коленкам, поднимать руку вверх...) тогда, когда они услышат слова, с зад
Предложите детям хлопать в ладоши (топать ногой, ударять по коленкам, поднимать руку вверх...) тогда, когда они услышат слова, с зад Популяционнаягенетика - 6
Популяционнаягенетика - 6 Музей. 3 класс
Музей. 3 класс Список наиболее значимых конкурсов исследовательских и проектных работ учащихся в 2011-2012 уч. г.
Список наиболее значимых конкурсов исследовательских и проектных работ учащихся в 2011-2012 уч. г. Гостевой Дом Диамонд
Гостевой Дом Диамонд Акция «Рождественские колокола»
Акция «Рождественские колокола» Cистема курсовой устойчивости ESP1
Cистема курсовой устойчивости ESP1 Презентация_Владимир_11 октября
Презентация_Владимир_11 октября Инновации в образовательном процессе: использование современных информационных технологий управления в рамках обучения по эконо
Инновации в образовательном процессе: использование современных информационных технологий управления в рамках обучения по эконо Понятие права. Правовая норма. Источники права
Понятие права. Правовая норма. Источники права Урок преподавателя химии Смирновой Л.Н.. «Урок это солнце, вокруг которого, как планеты, вращаются все формы учебных занятий» Н.М. Ве
Урок преподавателя химии Смирновой Л.Н.. «Урок это солнце, вокруг которого, как планеты, вращаются все формы учебных занятий» Н.М. Ве Бизнес-план ShengYou
Бизнес-план ShengYou Презентация на тему Топливно-энергетический комплекс (ТЭК)
Презентация на тему Топливно-энергетический комплекс (ТЭК) Презентация на тему Valentine’s Day
Презентация на тему Valentine’s Day Презентация на тему Рождество 6 класс
Презентация на тему Рождество 6 класс  Национальное блюдо Болгарии Гювеч
Национальное блюдо Болгарии Гювеч ИНДИВИДУАЛЬНЫЕ ГИГИЕНИЧЕСКИЕ ТАПОЧКИ
ИНДИВИДУАЛЬНЫЕ ГИГИЕНИЧЕСКИЕ ТАПОЧКИ В техникуме прошёл Чемпионат по играмWarcraft Dota и Flatout 2
В техникуме прошёл Чемпионат по играмWarcraft Dota и Flatout 2 Расстояния до звёзд
Расстояния до звёзд Бажов Павел Петрович. Уральские сказы
Бажов Павел Петрович. Уральские сказы Методы анализа, используемые при проектировании логистических систем
Методы анализа, используемые при проектировании логистических систем Фламбирование десертных блюд
Фламбирование десертных блюд Моя семья
Моя семья МБОУ
МБОУ Введение в разработку под Kinect
Введение в разработку под Kinect «Нахождение числа по его дроби»
«Нахождение числа по его дроби»