Цех по производству мобильных пусковых установок для межконтинентальных баллистических ракет Муравейник 3М
- Цех по производству мобильных пусковых установок для межконтинентальных баллистических ракет Муравейник 3М

Содержание
- 2. Цель Разработка и создание мобильной пусковой установки с возможностью скрытой передислокации по пересеченной местности и открытым
- 3. Приборы и материалы:
- 4. Этапы разработки Определение требуемых характеристик грузоподъемности и проходимости. Проектирование конструкции, определение самонапряженных узлов, а так же
- 5. Разработка и программирование
- 6. Сборка
- 8. Испытания
- 9. Итог работы Модель представляет собой восьмиколесную полноприводную платформу, оснащенную контейнером хранения и запуска ракеты. Минимальное время
- 11. Скачать презентацию
Слайд 2Цель
Разработка и создание мобильной пусковой установки с возможностью скрытой передислокации по
Цель
Разработка и создание мобильной пусковой установки с возможностью скрытой передислокации по
Слайд 3Приборы и материалы:
Приборы и материалы:

Слайд 4Этапы разработки
Определение требуемых характеристик грузоподъемности и проходимости.
Проектирование конструкции, определение самонапряженных узлов, а
Этапы разработки
Определение требуемых характеристик грузоподъемности и проходимости.
Проектирование конструкции, определение самонапряженных узлов, а
Слайд 5Разработка и программирование
Разработка и программирование
Слайд 6Сборка
Сборка

Слайд 8Испытания
Испытания

Слайд 9Итог работы
Модель представляет собой восьмиколесную полноприводную платформу, оснащенную контейнером хранения и
Итог работы
Модель представляет собой восьмиколесную полноприводную платформу, оснащенную контейнером хранения и
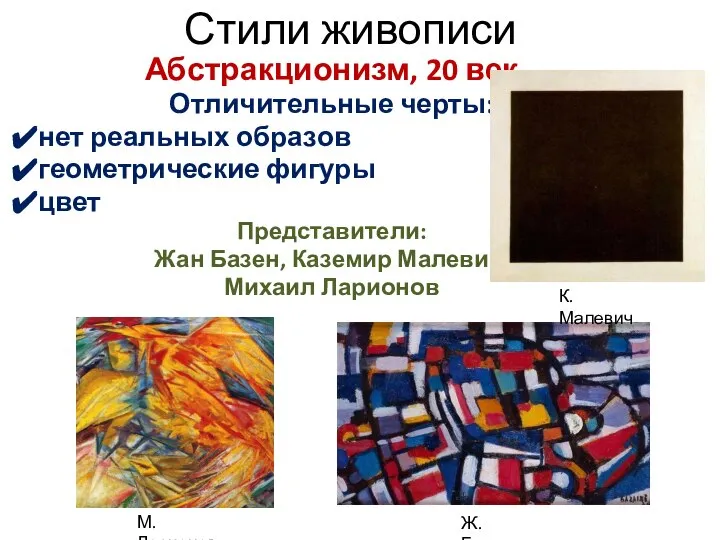 Стили живописи
Стили живописи Проблема человека в Философии
Проблема человека в Философии  Present Perfect
Present Perfect  Построение чертежа ночной сорочки
Построение чертежа ночной сорочки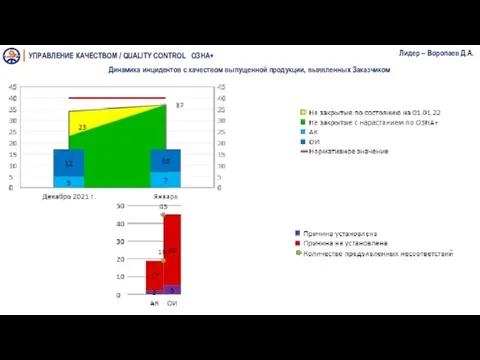 Управление качеством / quality control
Управление качеством / quality control Биология. Вводный урок
Биология. Вводный урок Гражданские правоотношения. 9 класс
Гражданские правоотношения. 9 класс Результативность усвоения общеобразовательнойпрограммы ДОУ
Результативность усвоения общеобразовательнойпрограммы ДОУ Гастрономические фестивали как региональные бренды
Гастрономические фестивали как региональные бренды Трудоустройство несовершеннолетних
Трудоустройство несовершеннолетних Ледовая фантазия
Ледовая фантазия Образовательная технология Ситуация
Образовательная технология Ситуация От новичка до владельца собственной студии. Центр перманентного макияжа SECRET PM
От новичка до владельца собственной студии. Центр перманентного макияжа SECRET PM Жуковский «Светлана»
Жуковский «Светлана» НАШ ГОРОД
НАШ ГОРОД Презентация на тему Функция y=k/x
Презентация на тему Функция y=k/x Назад в средневековье 6 класс
Назад в средневековье 6 класс 20180102_do_m_zhalsabonlv_konspekt
20180102_do_m_zhalsabonlv_konspekt Презентация на тему Что значит быть моральным
Презентация на тему Что значит быть моральным Разработка системы мониторинга посещаемости УИПК
Разработка системы мониторинга посещаемости УИПК Берегите здоровье
Берегите здоровье Условия и механизмы функционирования рынка информационных услуг и продуктов
Условия и механизмы функционирования рынка информационных услуг и продуктов Американо-российская двусторонняя президентская комиссия: Рабочая группа по противодействию незаконному обороту наркотиков
Американо-российская двусторонняя президентская комиссия: Рабочая группа по противодействию незаконному обороту наркотиков Электроэнергетика России
Электроэнергетика России Новые технологии в строительстве
Новые технологии в строительстве Качество подготовки выпускников МОУ Досатуйской СОШ
Качество подготовки выпускников МОУ Досатуйской СОШ Круглое королевство
Круглое королевство Презентация на тему Число и цифра 2 (1 класс)
Презентация на тему Число и цифра 2 (1 класс)